
国際特許分類[F16H21/52]の内容
機械工学;照明;加熱;武器;爆破 (654,968) | 機械要素または単位;機械または装置の効果的機能を生じ維持するための一般的手段 (198,328) | 伝動装置 (51,171) | 主としてリンクまたはレバーのみからなり,滑動部をもつか,またはもたない伝動装置 (548) | 3次元的に運動するもの (86) | 回転運動と振動の相互変換用 (6)
国際特許分類[F16H21/52]に分類される特許
1 - 6 / 6
剛性を有する複数の弾性ワイヤーを用いたパラレルメカニズム
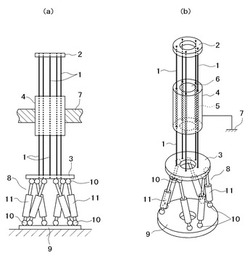
【課題】従来のパラレルメカニズム等の多自由度機構は、一般的に構造が複雑で、柔軟性も低い。
【解決手段】本発明のパラレルメカニズムは、剛性を有する複数の弾性ワイヤーを合理的に用いて構成することにより、従来のパラレルメカニズムでは不可能であった柔軟な動きを行えるようにした多自由度機構を提供するものであり、即ち、剛性を有し、円形断面で単線の弾性ワイヤー1の複数本が、被駆動側部材2と駆動側部材3の各支点位置において同一配置となるように接続されており、また被駆動側部材と駆動側部材間には弾性ワイヤーを、横断面方向から見た配置を維持しつつ、軸方向に移動及び軸方向の回りに回転可能に支持する中間支持部材4が設けられているパラレルメカニズムである。
(もっと読む)
動力伝達機構及びこの動力伝達機構を使用したロボット

【課題】多数のカムやギヤ等を連結しなくとも、回転軸への揺動板の取り付け方により、回転軸の駆動を特殊な揺動運動に変換する動力伝達機構と、これを水中での推進力を得るロボットとしとして提供する。
【解決手段】回転軸5a,5b,5cには、第1の揺動板8が等間隔で配され、この第1の揺動板8が回転軸5a,5b,5cに対する傾斜角度は同じで、回転軸5a,5b,5cに対する取り付け方向(「位相」)が順に規則的にずれて配されている。
(もっと読む)
動力伝達機構およびこの動力伝達機構を使用したロボット
【課題】多数のカムやギヤ等を連結しなくとも、回転軸への揺動板の取り付け方により、回転軸の駆動を特殊な揺動運動に変換する動力伝達機構と、これを多足歩行の玩具等に適用した駆動力推進構造体として提供する。
【解決手段】回転軸5には、第1の揺動板8が等間隔で複数配され、この複数の第1の揺動板8が回転軸5に対する傾斜角度θ1は同じで、回転軸5に対する取り付け方向(「位相」)が順に規則的にずれて配されている。図1は、ムカデのような多足歩行玩具として、上記動力伝達機構D1を有する駆動力推進構造体(多足歩行の玩具)1に適用した例である。
(もっと読む)
動力伝動装置
【課題】往復運動や揺動運動を、回転運動に変換するとともに、弱い力で入力してもパワーアップして回転トルクを高め、さらに回転軸心の方向も直交する方向に変換可能な簡単な構成の動力伝動装置を実現する。
【解決手段】往復駆動歯車5が時計方向に回転すると、第1の往復回転歯車23は反時計方向に回転して、第1の一方向クラッチ34を介して第1の一方向回転歯車26を反時計方向に回転させ、往復駆動歯車5が反時計方向に回転すると、第2の往復回転歯車35は反時計方向に回転して、第2の一方向クラッチ36を介して第2の一方向回転歯車38を反時計方向に回転させる。
(もっと読む)
運動伝達装置およびその構成部品
伝達運動を提供するアクチュエータとベース部材とを具備する運動伝達装置用の伝動部材であって、ベース部材に連結されるように構成され、かつベース部と湾曲部とを具備する第1のアームと、アクチュエータから伝動部材に運動を伝達する装置のアクチュエータに連結する少なくとも1つの連結手段とを具備する伝動部材。 (もっと読む)
回転・揺動変換機構
回転運動を大きな角度の揺動運動(往復回動運動)に効率的に変換できる回転・揺動変換機構を提供する。回転・揺動変換機構1は、回転軸2と、揺動軸3と、揺動部材4を備える。回転軸2は、モータに連係する垂直部2Aと、垂直部2Aに対して傾いた傾斜部2Cを有する。揺動部材4は、揺動軸3に取り付けられる。傾斜部2Cは、揺動部材4の狭持面4D、4Eの間に狭持され、回転軸2の回転に伴って、狭持面4D又は4Eに接しながら動くことにより、狭持面4D又は4Eを押して、揺動部材4を左右に揺動させる。これにより、揺動軸3は、往復回動運動を行う。  (もっと読む)
(もっと読む)
1 - 6 / 6
[ Back to top ]