
国際特許分類[F16H59/42]の内容
機械工学;照明;加熱;武器;爆破 (654,968) | 機械要素または単位;機械または装置の効果的機能を生じ維持するための一般的手段 (198,328) | 伝動装置 (51,171) | 回転運動を伝達するための変速あるいは逆転伝動装置のための制御入力 (10,329) | 入力が速度に関するもの (3,131) | 伝動装置要素の速度 (1,729) | 入力軸速度 (1,141)
国際特許分類[F16H59/42]に分類される特許
1 - 10 / 1,141
車両の制御装置
【課題】車両の制御装置に関し、エンジンの燃費を効果的に向上させる。
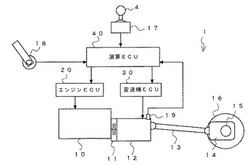
【解決手段】アクセルセンサ18と、回転数センサ19と、アクセル開度とエンジン出力とに対応する座標平面上に変速機等出力回転数線が設定された第1のマップからエンジン出力を設定するエンジン出力設定部41と、エンジン出力と燃料噴射量とに対応する座標平面上に最少燃料噴射量線が設定された第2のマップから目標燃料噴射量を設定する目標燃料噴射量設定部42と、エンジン出力とエンジン回転数とに対応する座標平面上に最適エンジン回転数線が設定された第3のマップから目標エンジン回転数を設定する目標エンジン回転数設定部43と、変速機出力回転数と目標エンジン回転数とに基づいて目標変速比を算出する目標変速比演算部44と、エンジン10を制御するエンジンECU20と、変速機12を制御する変速機ECU30とを備えた。
(もっと読む)
デュアルクラッチ式自動変速機およびその変速制御方法

【課題】変速時に原動機回転数が許容回転数を超えることなく、良好な変速を行なうことが可能な信頼性の高いデュアルクラッチ式自動変速機およびその変速制御方法を提供する。
【解決手段】第1、第2入力軸21、22と、デュアルクラッチ40と、第1、第2シフト機構101〜104と、原動機回転数検出部2bと、入力軸回転数検出部3aと、変速制御装置とを備え、変速制御装置は、推定入力軸加速度演算部3cと、ダウンシフト指令送出判定部3dと、要求ギヤ段判定部3eと、変速完了推定時間演算部3gと、変速完了時回転数演算部3hと、演算された変速完了時入力軸回転数Ni(T)が、原動機過回転数閾値Eより大きい場合には、変速完了時入力軸回転数Ni(T)が原動機過回転数閾値Eより小さくなるように原動機回転数Neの目標回転数変速度ΔNetを変速制御の途中から大きくするよう制御する目標回転数変速度制御部3kと、を備える。
(もっと読む)
変速制御装置
【課題】四節リンク機構として構成された無段変速機における変速比を適正に制御可能な変速制御装置を提供すること。
【解決手段】四節リンク機構式の無段変速機における変速比を制御する変速制御装置は、動力源への要求出力を導出する要求出力導出部と、動力源への要求出力に応じた、無段変速機における目標入力回転数を導出する目標入力回転数導出部と、目標入力回転数に対する無段変速機における実際の出力回転数の比である目標変速比に応じた目標偏心量を導出する目標偏心量導出部と、無段変速機における実際の偏心量に対する目標偏心量との差に基づいて、偏心量を制御するための偏心量制御項を導出し、無段変速機の状態から得られる変速比可変機構の負荷特性に応じて、偏心量制御項を補償する偏心量制御部とを備える。
(もっと読む)
駆動制御装置及び駆動制御方法
【課題】動力源の運転点を変速機の特性を鑑みた目標の回転数に迅速に到達可能な駆動制御装置を提供すること。
【解決手段】車両が走行するための動力を発生する動力源と、動力源からの動力を車両の駆動輪に伝達する変速機と、変速機と駆動輪の間に配置され、動力源からの動力のみを駆動輪側に伝達可能なワンウェイクラッチと、を有した、動力源から駆動輪への動力を伝達する変速機構とを備えた駆動システムにおける駆動制御装置は、変速機構がディスエンゲージ状態からエンゲージ状態への移行時の要求出力に対応する内燃機関の目標回転数を、変速機構のトーション特性を鑑みて導出する目標回転数導出部と、移行時の内燃機関の回転数が目標回転数に到達するよう内燃機関を制御する内燃機関制御部と、移行時の内燃機関の回転数が目標回転数に到達すると、変速機構の変速比を制御して、変速機構をエンゲージ状態にする変速制御部とを備える。
(もっと読む)
車両変速機の制御方法
【課題】アクチュエータでスリーブを作動させて同期作動をなす変速メカニズムを搭載した車両が減速中に、現在走行の変速段に比べて低段の目標変速段への変速を行うとき、入力軸と出力軸の間の部品間で発生するバックラッシュなどによる衝撃及び騷音の発生を防止することにより、変速品質の向上で車両の静かさと乗り心地を向上させ、車両商品価値を向上させるようにした車両変速機の制御方法を提供する。
【解決手段】車両の減速によって現在走行の変速段に比べて低い目標変速段に変速する必要があるとき、目標変速段の変速ギアと出力軸の間の同期を開始する変速開始段階と、目標変速段の変速ギアによる出力軸と入力軸の間の同期が完了すれば、同期状態を所定時間維持する同期維持段階と、同期維持段階の後、目標変速段との噛合いを完了して変速を完了する変速完了段階と、を含んでなる。
(もっと読む)
ハイブリッド車両の変速ギヤ段が故障したときの車両駆動源制御方法
【課題】ハイブリッド車両の変速ギヤ段スイッチが故障したときの車両駆動源の制御方法を提供する。
【解決手段】変速機出力端の速度が0rpmであるかを確認する段階、ハイブリッド制御機でP/N段を検出する段階、P/N段として検出された場合にはエンジンおよびモータの速度を制御する段階を含み、前記P/N段の検出段階は、APSを作動させる段階、変速機入力端の速度と出力端の速度を比較する段階、前記変速機入力端の速度と出力端の速度の差が予め設定された値以上であり、所定時間を維持するか確認する段階を含み、前記P/N段の検出段階は、TCU側からギヤ段スイッチ故障信号がハイブリッド制御機に受信される段階をさらに含むことを特徴とする。
(もっと読む)
無段変速機及びアクチュエータ
【課題】安価な無段変速機及びアクチュエータを提供する。
【解決手段】プーリ軸に固定され一体的に回転する固定シーブと、前記プーリ軸に沿って軸線方向移動可能に支持された可動シーブと、前記固定シーブと前記可動シーブとの間に配置されたベルトと、前記可動シーブを軸線方向に移動させてプーリ溝幅を可変するアクチュエータとを有する無段変速機であって、前記アクチュエータは、電動モータと、前記電動モータが発生した回転力を伝達する減速機構と、前記減速機構を介して前記電動モータの動力を入力するナットと、前記ナットの回転量に応じて軸線方向に変位するねじ軸と、一端を前記ねじ軸に連結し、他端を前記可動シーブに連結し揺動可能となっている揺動部材とを有し、前記アクチュエータにはセンサが設けられていないことを特徴とする。
(もっと読む)
車両用動力伝達装置の制御装置
【課題】例えばニュートラル制御の開始直後など、ニュートラル制御の開始時にタービン回転速度が上昇している途中でニュートラル制御およびヒルホールド制御を終了する場合に、それらの制御終了に伴うショックを抑えることができる車両用動力伝達装置の制御装置を提供する。
【解決手段】電子制御装置52は、ニュートラル制御の開始時にタービン回転速度が上昇している途中でニュートラル制御およびヒルホールド制御を終了する場合において、タービン回転速度が第1回転速度判定値未満である場合には、クラッチC1の係合作動によりタービン回転速度が継続的に低下し始めてから、ブレーキB1を解放させる。従って、クラッチC1の係合作動の進行に従ってブレーキB1を解放させることができるので、相互のタイミングを調節して、ニュートラル制御およびヒルホールド制御の終了に伴うショックを抑えることが可能である。
(もっと読む)
自動変速装置および変速機の変速段の異常判定方法
【課題】変速機の変速段の異常を誤判定するのを抑制する。
【解決手段】車速Vに基づいて許容最低変速段GSminを設定し(S110)、推定変速段GSestが許容最低変速段GSmin未満のときには(S120)、その要因が推定変速段GSestの変更によるものであるときには自動変速機の変速段は異常であると判定し(S130,S140)、その要因が許容最低変速段GSminの変更によるものであるときには、推定変速段GSestが許容最低変速段GSmin未満となったことだけでは自動変速機の変速段が異常であるとは判定せず、入力軸回転速度Ninに応じて自動変速機の変速段が異常であるか否かを判定する(S130〜S150)。
(もっと読む)
車両制御装置
【課題】変速機の同期装置に関して学習を行う機会を適切に確保できる車両制御装置を提供すること。
【解決手段】入力軸2Aの回転をそれぞれ異なる変速比で出力軸2Bに伝達する複数のギヤ対21,22,23,24と、いずれかのギヤ対に選択的に係合して入力軸の回転と出力軸の回転とを同期させる制御可能な同期装置40と、を有する常時噛合い式の変速機2と、入力軸に接続された第一動力源1と、出力軸に接続された第二動力源3とを備え、第一動力源の動力によらずに第二動力源の動力によって車両を走行させる所定走行時に、同期装置によって入力軸の回転と出力軸の回転とを同期させるときの動力伝達の開始点について学習制御を行う。
(もっと読む)
1 - 10 / 1,141
[ Back to top ]