
国際特許分類[F16H59/58]の内容
機械工学;照明;加熱;武器;爆破 (654,968) | 機械要素または単位;機械または装置の効果的機能を生じ維持するための一般的手段 (198,328) | 伝動装置 (51,171) | 回転運動を伝達するための変速あるいは逆転伝動装置のための制御入力 (10,329) | 入力が機械の状態に関するもの,例.ドア,または安全ベルトの位置 (699) | 舵取り装置からの信号に依存するもの (57)
国際特許分類[F16H59/58]に分類される特許
1 - 10 / 57
減速支援システム
【課題】車両の運転者に違和感を与えることを抑制しつつ、減速支援を行う。
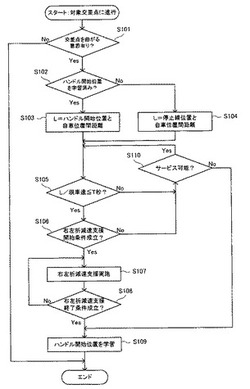
【解決手段】減速支援システム(10)は、車両(1)に搭載され、車両が右折又は左折する際に、車両の運転者が、右折又は左折のためにハンドルの操舵を開始する位置である操舵開始位置を学習する学習システム(109)と、運転者の右左折意思を確認する意思確認手段(109)と、車両の現在位置と、学習された操舵開始位置との間の距離を算出可能な距離算出手段(109)と、意思確認手段によって運転者の右左折意思が確認され、且つ学習システムによって操舵開始位置が学習されている場合、距離算出手段によって算出された距離に応じて減速支援を行う減速支援手段(109)とを備える。
(もっと読む)
車両挙動制御装置

【課題】運転者への違和感が小さくできる車両挙動制御装置を得る。
【解決手段】ハンドルの操舵角を検出又は推定する操舵角検出手段と、車両の速度を検出する車速検出手段と、操舵角検出手段の出力である操舵角の0近傍に制御不感帯を有し、操舵角検出手段の出力である操舵角に対して、低車速側では制御不感帯幅を大きく、高車速側では制御不感帯幅を小さく設定し、車速検出手段の出力である車速に応じた制御不感帯幅を出力する制御不感帯幅設定器と、操舵角検出手段の出力である操舵角の絶対値が制御不感帯幅設定器の出力である制御不感帯幅で設定される操舵角の絶対値の上限より大きい場合に車両の減速制御用出力を発生する車両減速制御実施判断器とを備え、車両減速制御実施判断器の前記減速制御用出力により車両の減速制御を実施する
(もっと読む)
車両用自動変速機の制御装置
【課題】旋回中の変速動作を適切に設定できる車両用自動変速機の制御装置を提供すること。
【解決手段】車両は、車両の前後方向の加速度を検出する前後加速度検出手段と、車両の幅方向の加速度を検出する横加速度検出手段とを具えている。自動変速機の制御装置は、ハンドル操舵角と車速から推定横加速度を算出する推定横加速度算出手段と、推定横加速度の値と横加速度の値との差である横加速度偏差を算出する横加速度偏差算出手段を具えている。ある前後加速度の値と横加速度の値とからなる加速度状態が、変速禁止を行う状態か否かを判定する判定値を横加速度偏差に応じて補正する変速禁止領域補正手段を具えている。これにより、アップシフトが禁止される領域を補正し、補正された変速禁止領域を用いて自動変速機を制御する。
(もっと読む)
車両制御装置
【課題】ドライバーに制御の遅延による違和感を与えず、又、路面摩擦係数が低下した場合に於いても減速力過多により車両が不安定に陥ることがなく、従来の装置よりも高性能でかつ設計時に於いてもマッチングが容易な車両制御装置を提供する。
【解決手段】
ドライバーの旋回動作により前輪に発生するセルフアライニングトルクを検出し、このセルフアライニングと車速から演算した推定舵角を基に変速比制御を行うことで、ドライバーに制御遅延による違和感を与えず、路面摩擦係数が低下した場合に於いても減速力過多により車両が不安定に陥ることがなく、従来の装置に比して高性能でかつ設計時に於いてもマッチングが容易となるようにした。
(もっと読む)
変速比制御装置
【課題】旋回時に過度のシフトダウンで車両が不安定になる場合があった。
【解決手段】走行状態検出手段1からの情報と旋回状態検出状態2の情報に基づき旋回時の目標変速比を設定する旋回時目標変速比設定手段3と、車両挙動不安定の場合における目標変速比を設定する車両不安定時目標変速比設定手段5とを有し、車輪の挙動が安定か不安定を判定する車両挙動判定手段4が安定と判定した場合は、旋回時目標変速比設定手段3からの目標変速比で、車両挙動判定手段4が不安定と判定した場合は、車両不安定時目標変速比設定手段5からの目標変速比で変速機20を制御することにより、車両が不安定になることを防止する。
(もっと読む)
作業車の走行制御装置
【課題】本発明は、トロイダル変速機構を搭載した作業車で、変速比を一定にして走行を維持する定車速モードで走行している場合に、旋回操作を行えば急激な走行速度の低下を防止して速やかな旋回を行わせ、作業能率を低下させない作業車を提供することが課題である。
【解決手段】エンジンEが適宜回転数でトロイダル変速機構4の変速比を一定に固定して走行する定車速モードと左右走行装置8の旋回角を検出する旋回角検出手段130を設け、設定速度を定速度T1に設定して定車速モードで走行中に旋回を行うときにおいて、旋回内側のブレーキ作動が始まる直前の前旋回角αで設定速度を増速度T2に変更し、旋回内側のブレーキ作動が終了する直前の終旋回角βで設定速度を元の定速度T1に変更するように制御してなる作業車の走行制御装置の構成とする。
(もっと読む)
歩行型車両
【課題】コストの上昇を抑制しつつ急旋回を防止して狙いとする旋回ラインが容易に得られる歩行型車両を提供する。
【解決手段】
車両1が所定速度以上で走行している際に、旋回操作子33が左方又は右方に旋回操作されたとき、該車両1を減速させる旋回時減速機構55を備えた。
(もっと読む)
車両の駆動力制御装置及び車両のジェネレータダイオードの冷却方法
【課題】発電機のジェネレータダイオードの温度上昇を適切に抑制する。さらに、冷却媒体の流量を増加させるためのエンジン回転数の変化を自車両の走行状態に適合させて行う。
【解決手段】車両の駆動力制御装置は、ジェネレータダイオードの冷却の要否の判定をし(ステップS2)、その結果、ジェネレータダイオードの冷却が必要であると判定した場合、ジェネレータダイオードを冷却するために要求される目標エンジン回転数を取得し(ステップS3)、その取得した目標エンジン回転数にする自動無段変速機の変速比を取得し(ステップS4)、舵角変化率の絶対値を基に、自動無段変速機の変速比を変化させる速度を設定し(ステップS6〜ステップS13)、取得した変速比に、その設定した速度で変化させる変速制御をする(ステップS14)。
(もっと読む)
自動変速機制御装置
【課題】簡易MモードからDモードに戻る際の変速速度を一定に設定すると、車両の様々な走行状態に対応することができず、運転者に違和感を与えることが避けられなかった。
【解決手段】セレクトレバーのDレンジ選択による自動変速モードと、セレクトレバーの手動操作による手動変速モードと、セレクトレバーのDレンジ保持中に、セレクトレバー以外からのシフト信号を受けて変速段を一時的にシフトさせる簡易手動変速モードとを備えた自動変速機制御装置において、簡易手動変速モードから自動変速モードに移行する際の自動戻り変速速度を、車両の走行状態に応じて変更する変速速度調整部16を有する。
(もっと読む)
車両制御装置
【課題】運転者が旋回の意思を持ち、操舵トルクを発生させた際に、ただちに変速比変更を開始することで、運転者に違和感を与えずに良好な旋回走行を行わせるとともに、従来よりも高性能で安価な車両制御装置を得る。
【解決手段】ステアリングの操舵力に関する情報に基づいて運転者の旋回意思を検出する旋回意思検出手段2と、自動変速機4の変速比を制御する変速比制御手段3と、を備え、変速比制御手段3は、旋回意思検出手段2の出力に基づいて変速比を制御する。
(もっと読む)
1 - 10 / 57
[ Back to top ]