
国際特許分類[G01B11/275]の内容
物理学 (1,541,580) | 測定;試験 (294,940) | 長さ,厚さまたは同種の直線寸法の測定;角度の測定;面積の測定;表面または輪郭の不規則性の測定 (22,327) | 光学的手段の使用によって特徴づけられた測定装置 (13,565) | 角度またはテーパ測定用;軸の心合せ試験用 (1,129) | ホイールの心合せ試験用 (12)
国際特許分類[G01B11/275]に分類される特許
1 - 10 / 12
トレッドトランスファー、及びそれを用いたトレッドトランスファーとシェーピングフォーマとの芯ズレ評価方法
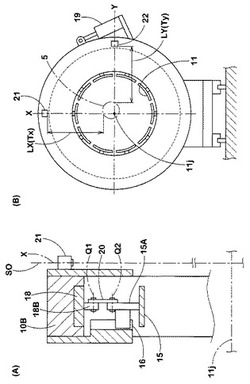
【課題】トレッドトランスファーとシェーピングフォーマとの芯ズレを、迅速に評価でき、生産ラインの精度低下を早期にフィードバックしうるとともに、装置コストの上昇を最小限に抑えうるトレッドトランスファー、及びそれを用いたトレッドトランスファーとシェーピングフォーマとの芯ズレ評価方法を提供する。
【解決手段】トレッドリングを、シェーピングフォーマに保持された生タイヤ基体の半径方向外側のトレッド貼付位置まで搬送しかつ保持するトレッドトランスファーである。トレッドトランスファーのリング状移動台に、トレッド保持リング11の軸心11jとは直角な基準面S0上にて前記軸心11jを通るX軸上に配される第1のレーザ距離センサ21と、このX軸とは直交する向きのY軸上に配される第2のレーザ距離センサ22とを設ける。前記第1、2のレーザ距離センサ21、22にてシェーピングフォーマの支持軸5までの距離を測定する。
(もっと読む)
アライメントテスタ校正装置

【課題】アライメントテスタの校正作業に要するコストを低減できるとともに、アライメントテスタの校正作業を効率的に行うことができるアライメントテスタ校正装置を提供する。
【解決手段】校正ブロック51・52・53と、校正ブロック51・52・53を支持する支持部材40と、左右方向における支持部材40の傾斜を調整する傾斜調整機構20と、第一レーザー61および第二レーザー62を照射するレーザー墨出し器60と、校正ブロック51・52・53が基準位置P1・P2・P3に位置決めされたときに第一レーザー61を受光する第一受光器71と、校正ブロック51・52・53が基準位置P1・P2・P3に位置決めされたときに第二レーザー62を受光する第二受光器72と、左右方向に沿って支持部材40を移動させる左右方向スライド機構32と、上下方向を回動中心の軸方向として支持部材40を回動させる回動機構33と、を具備した。
(もっと読む)
走行機構測定用のレーザプロジェクタ
走行機構測定用のレーザプロジェクタ(2)は、レーザ光ビーム(8)を送出するレーザ光源(4)と、レーザ光ビーム(8)により照射されると、パターン化されたレーザ光パターン(9)を発生する光学素子(6)と、検出器(10)と、評価装置とを有している。検出器(10)は、動作中、パターン化されたレーザ光パターン(9)の少なくとも1つの領域により照射されるように配置されていて、この照射と相関する出力信号を発生する。評価装置は、検出器(10)により発せられた出力信号をまえもって定められた少なくとも1つの目標値と比較し、出力信号と目標値との大きな偏差を検出するとレーザ光源(4)をスイッチオフする。  (もっと読む)
(もっと読む)
ホイールアライメント測定方法
【課題】精度の高いホイールアライメント測定方法を提供する。
【解決手段】ホイールアライメント測定方法は、光学式センサを用いて車輪のホイールアライメントを測定する。その場合、測定対象として、光学式センサから出射される光に対するサイドウォールに設けられた突起22の反射率とその突起22が設けられていないサイドウォール18aの非突起領域24の反射率とが異なるタイヤを用いる。また、突起22は、その反射率がサイドウォール18aの非突起領域24の反射率よりも低い材料で形成されている。
(もっと読む)
車輌のホイールアライメント測定装置
【課題】より簡単な構成でしかもトー角及びキャンバ角を高精度で測定することができるホイールアライメント測定装置を提供する。
【解決手段】水平に放射された一対のレーザ光を車輪側面に照射させて該車輪側面上にレーザ光による輝線パターンを形成するための、互いに上下鉛直に位置するレーザ光放射手段、該輝線パターンを測定画像として取り込み、該レーザ光放射手段と同一面内で外側に配置された画像取込手段、取り込んだ測定画像と予め登録しておいた登録画像との輝線パターン形状を比較し、該登録画像の中から相関率が一定値以上の高い登録画像をサーチし、選択してその選択した画像から重心位置データを決定、登録する画像処理手段、登録された位置データを基にホイールアライメントを算出する演算処理手段を含む、車輌のホイールアライメントを非接触式で測定する車輌のホイールアライメント測定装置。
(もっと読む)
画像処理による車両のホイル中心位置計測装置
【課題】車両のホイルの形状中心を正確に計測することを可能とする画像処理による車両のホイル中心位置計測装置を提供する。
【解決手段】ドラム1上に設置される車両2の性能試験時に車両2のホイル21の中心位置を計測する画像処理による車両のホイル中心位置計測装置を、ホイル21の回転中心に施されたマーカを撮像し、撮像した画像を出力するカメラ3と、予め登録されたマーカの情報に基づいて、カメラ3から入力された画像中からマーカを抽出し、抽出したマーカの画像中の位置からホイル21表面におけるマーカの位置を算出し、算出したマーカの位置をホイル21の回転中心位置として検出する画像処理部4とからなる構成とした。
(もっと読む)
車両ホイールアライメントシステムおよび方法体系
ハイブリッドホイールアライメントシステムおよび方法体系は、ホイールの第1の対(たとえば前輪)の受動ターゲットと、ホイールのもう1つの対(たとえば後輪)の能動検知ヘッドとを用いる。能動検知ヘッドは、ターゲットの画像を取り込むための画像センサを、能動検知ヘッド間の関係を検知するための少なくとも1つの空間関係センサと組合せたものである。能動検知ヘッドのうち一方または双方は、それぞれの検知ヘッドの1つ以上の傾斜角度を検知するための傾斜計などを含んでいてもよい。能動検知ヘッドからのデータをホストコンピュータに送って処理し、たとえばホイールアライメントで用いるのに役立つパラメータの測定のための、1つ以上の車両寸法を得ることができる。  (もっと読む)
(もっと読む)
自動車の車台測定のための方法、車台測定装置及び自動車検査通路
互いに相対して配置された2つの測定機器を備える無接触式測定用の車台測定装置を用いて自動車の車台測定のための本発明に基づく方法は、次のステップを含んでおり、つまり第1の車軸を2つの測定機器間に位置決めするステップ、第1の車軸の両方のホイールリムを2つの測定機器によって無接触で測定するステップ、第2の車軸を2つの測定機器間に位置決めするステップ、第2の車軸の両方のホイールリムを2つの測定機器によって無接触で測定するステップ、次いで前記測定されたすべてのホイールリムのホイール状態値を車台測定装置によって算出するステップを含んでいる。  (もっと読む)
(もっと読む)
ロータリエンコーダの回転スリット板組付け方法および装置
【課題】 従来の方法で問題となっていた誤差および誤検出を解消し、組付け精度を向上させることができるロータリエンコーダの回転スリット板組付け方法および装置を提供する。
【解決手段】 ロータリエンコーダの回転スリット板組付け方法は、仮組みロータリエンコーダを少なくとも1周分回転させて振れおよび変位を計測するステップと、この少なくとも1周分の回転時の時間と振れ変位との関係をサンプリングするステップと、サンプリングによって得られたデータから振れの最大変位を求め、これより若干小さい値を閾値として設定するとともに、閾値を超える時間ΔTを演算するステップと、仮組みロータリエンコーダをさらに回転させ、閾値を超えた後さらに時間ΔT/2経過した位置を最大変位位置とするステップとを含んでいる。
(もっと読む)
ホイールアライメント方法及び測定用ホイール
【課題】ホイールアライメントの一環として車体幅方向の中心とホイールとの位置関係を測定することで車体本体とホイールの位置関係を適切に計測できるようにすることを課題とする。
【解決手段】ホイールアライメント方法として、車体中心設定工程によって測定するホイールが取り付けられた車体の幅方向の中心線を設定し、また、測定工程によって、前記中心線を通る車体を2分する中心平面と、前記ホイールの所定位置との距離を直接的もしくは間接的に測定する。
(もっと読む)
1 - 10 / 12
[ Back to top ]