
国際特許分類[G01C21/18]の内容
物理学 (1,541,580) | 測定;試験 (294,940) | 距離,水準または方位の測定;測量;航行;ジャイロ計器;写真計量または映像計量 (22,094) | 航行;グループ1/00から19/00に分類されない航行装置 (14,361) | 速度または加速度の測定を使用するもの (157) | 航行体上で実施するもの;推測航法 (121) | 加速度または速度の積分によるもの,すなわち慣性航行 (68) | 安定化プラットホーム,例.ジャイロスコープによるもの (9)
国際特許分類[G01C21/18]に分類される特許
1 - 9 / 9
空間安定化装置、空間安定化方法、及び空間安定化プログラム
Notice: Undefined index: from_cache in /mnt/www/gzt_ipc_list.php on line 285
自己較正型ジャイロスコープ・システム

【課題】ジャイロスコープ・システムにおいて、倍率誤差及びバイアス誤差を最少に抑える。
【解決手段】相互に非平行配列の検知軸130a〜130dを有する複数のジャイロスコープ110a〜110dを用いる。ジャイロスコープの数は、ナビゲーションに必要な軸の数よりも少なくとも1つ多い。プロセッサが、モード逆転技法を用いて、選択したジャイロスコープについてのバイアス誤差の推定値を得、ランダム閉ループ倍率技法を用いて、選択したジャイロスコープについて倍率誤差の推定値を得る。モード逆転技法では、各ジャイロスコープは較正のために一時的にオフラインとし、その後通常動作に戻す。少なくとも1つの冗長なジャイロスコープが設けられているので、選択したジャイロスコープがオフラインになっているとき、残りの動作中のジャイロスコープからの速度情報を用いれば、オフラインのジャイロスコープの軸を中心とする基準速度を導き出すことができる。
(もっと読む)
空間安定装置

【課題】従来の空間安定装置は、空間安定装置への風の影響が考慮されていないので、この風がジンバル機構の駆動制御に影響を及ぼし、前記駆動制御の精度が低下してしまう。
【解決手段】本発明による空間安定装置の制御方法は、第1及び第2風速検出器17,18によって検出された旋回方向13a及び俯仰方向13bに沿う風速に基づいて、旋回方向13a及び俯仰方向13bに沿うジンバル機構15への外乱トルクを算出し、算出した外乱トルクに基づいてジンバル機構15の駆動制御を補正する構成である。
(もっと読む)
空間安定装置のジンバル機構
【課題】本発明は、アウタユニットとインナユニットに分割し、インナユニットをアウタユニットに対して簡単に着脱自在とし、カメラ等の交換を容易化することを目的とする。
【解決手段】本発明による空間安定装置のジンバル機構は、アウタAZジンバル(1)とアウタELジンバル(3)とでアウタユニット(31)を形成し、ブラケット(11)とインナAZジンバル(5)とインナELジンバル(7)とによってインナユニット(32)を形成し、アウタユニット(31)に対してインナユニット(32)を着脱自在とし、カメラ等の交換を容易化する構成である。
(もっと読む)
ジンバル機構の回転規制構造
【課題】従来のジンバル機構の回転規制構造は、所定の回転角度毎にしか回転軸の回転を規制できないので、ペイロードの向きを所定角度にしか固定できない。
【解決手段】本発明によるジンバル機構の回転規制構造は、回転軸10の周方向に沿って互いに隣接して配置された第1歯20aを有する有限角歯部20を回転軸10に取り付けるとともに、前記有限角歯部20の近傍にロックレバー30を配置し、前記ロックレバー30に設けられた規制用歯部33の第2歯33aが前記第1歯20aに噛合することで、前記回転軸10の回転を規制するように構成されている。
(もっと読む)
空間安定装置の制御ループ
【課題】従来の空間安定装置の制御ループは、速度制御ループと角度制御ループとを互いに独立して設けていたので、ループの作成及び検証が煩雑になる問題があった。
【解決手段】本発明による空間安定装置の制御ループは、速度指令13を積分処理する第1積分処理部40を主制御ループ50の前段に設け、速度指令13及び角度指令14の入力状態と第2スイッチ処理部59の入力選択とにより、共通の制御ブロックで速度制御ループ20及び角度制御ループ30を構成できるようにした。
(もっと読む)
空間安定装置
【課題】従来の空間安定装置は、出力角度を使用する制御ループの精度を向上させるために、分解能の高い角度センサを使用する必要があり、コスト高になってしまう。
【解決手段】本発明による空間安定装置は、制御手段11が、角速度センサ7の出力角速度(θ/t)を積分することで変化角度(Δθ)を求め、角度センサ8の出力角度(θ)が1単位変化する間の角度を変化角度(Δθ)によって補間するとともに、前記出力角度(θ)が1単位変化する毎に前記変化角度(Δθ)をリセットする構成である。
(もっと読む)
レート検出装置およびこのレート検出装置を搭載した飛しょう体
【課題】レートセンサが保持具に取り付けられる際に、レートセンサの検出軸の方向が、所要の方向に向いていない場合にも、検出軸周りの角速度を高精度に検出でき、生産性を向上させることのできるレート検出装置を提供すること。
【解決手段】レート検出装置10は、検出軸Xのレートを検出するレートセンサ13と、検出軸傾き補正部14およびレート算出部15を具備する。検出軸傾き補正部14は、検出軸X上に配置したレートセンサ13の傾きを所要の行列式αにより求めたレートセンサ傾きであるレートセンサ傾きベクトルを、実測検出値に乗算して補正値α3を得る。
(もっと読む)
走行路の測定方法
本発明は、絶対座標系に対する軌道の実際の位置を含む軌道測定計画による軌道測定方法に関するものである。測定プラットホーム2は、慣性プラットホーム6を搭載し、軌道に沿って案内される。慣性プラットホーム6は、測定開始時に初期設定または較正され、かつ座標系に対して整合される。慣性プラットホーム6は、また測定プラットホーム2の走行中に座標系に対するその時々の測定プラットホーム位置を検出する。慣性プラットホーム6の位置データは、軌道近くに配置された固定点9,9´に基づいて周期的に点検され、座標系に対する偏差は、新たな較正または整合により修正される。 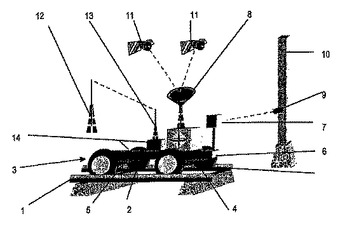 (もっと読む)
(もっと読む)
1 - 9 / 9
[ Back to top ]