
国際特許分類[G01D5/16]の内容
物理学 (1,541,580) | 測定;試験 (294,940) | 特に特定の変量に適用されない測定;単一のほかのサブクラスに包含されない2つ以上の変量を測定する装置;料金計量装置;他に分類されない測定または試験 (10,355) | 感知要素の出力を伝達するための機械的手段;感知素子の型式や特性が変換手段を束縛しない場合に,感知要素の出力を別の変量に変換する手段;特に特定の変量に適用されない変換器 (5,752) | 電気的または磁気的手段を使用するもの (4,262) | 電流または電圧の大きさに作用するもの (926) | 抵抗変化によるもの (61)
国際特許分類[G01D5/16]の下位に属する分類
接点と抵抗トラックとの相対運動によるもの (33)
国際特許分類[G01D5/16]に分類される特許
1 - 10 / 28
スロットルバルブ用回転角度検出装置
【課題】径時的に信頼性が低下することを抑制することができると共に、検出開始時の実際の回転角度と演算した回転角度との誤差を小さくすることができるスロットルバルブ用回転角度検出装置を提供する。
【解決手段】第1信号および第2信号を用いて磁気発生部20の回転角度を演算し、磁気発生部20の実際の回転角度θと演算により求めた回転角度φとの偏差が所定値に収束するようにフィードバック制御を行う角度演算部60と、角度演算部60が演算した回転角度φに対応する信号を出力する出力部70と、を備える。そして、角度演算部60は、検出開始時の演算した回転角度φとしてスロットルバルブ10が全閉状態であるときの角度を用いるものとする。
(もっと読む)
磁気センサ装置およびコネクタ機構

【課題】コストの低減を図ることが可能になるとともに、磁気センサ装置に加わる振動の周波数や加速度が大きくても回路基板に実装される電子部品と回路基板との間の断線を防止することが可能な磁気センサ装置を提供する。
【解決手段】磁気抵抗素子を備える磁気センサ装置は、磁気抵抗素子から出力される信号を処理する回路基板17と、磁気センサ装置が取り付けられる上位装置に回路基板17を電気的に接続するためのコネクタ19と、回路基板17が内部に配置される筺体20とを備えている。コネクタ19は、回路基板17の一端に直接固定されるとともに、筺体20に保持され、回路基板17は、固定部材25によって筺体20に固定されている。回路基板17では、コネクタ19と固定部材25との間に電子部品18、27〜29が実装されている。
(もっと読む)
位置検出装置
【課題】本発明は、広い区間において位置検出が可能で、さらに簡単な構成でありながら、広い温度範囲で物体の位置を正確に検出できる位置検出装置を提供することを目的とする。
【解決手段】本発明の位置検出装置は、第1、第2の磁気検出素子を有する磁気検出部21と、磁石51とを備え、前記第1の磁気検出素子の出力と前記第2の磁気検出素子の出力との比から、磁束密度がX軸となす角度θを求めることによって、前記磁石のX軸方向の相対的な移動距離を検出したものである。
(もっと読む)
磁気センサ及び回転角度検出装置
【課題】 検出感度の異方性を抑えるため、磁気的等方性を有し且つ小型である磁気センサを提供する。
【解決手段】 本発明の磁気センサは、非磁性の中間層を介して2つの強磁性膜が積層されたスピンバルブ型の磁気抵抗効果素子を用いた磁気センサにおいて、前記磁気抵抗効果素子の形状は複数のリングが連なった形状であり、各々のリングが電気的に接続されている状態で通電され、前記磁気抵抗効果素子の電気抵抗が外部磁場に対して変化することを特徴とする。前記検出素子が少なくとも2つ含まれるブリッジ回路で回転角度検出装置を構成する。
(もっと読む)
回転角度計測装置
【課題】回路コストを低減するため差動増幅回路やアナログ・デジタル変換回路が必要のない回路構成を有する回転角度計測装置を提供する。
【解決手段】回転軸と同期して回転する磁界発生手段が発生する磁界方向を少なくとも2以上の位相の異なる電気信号として出力するセンサ素子部211,212,221,222,231,232,241,242を有する回転角度センサ2と、センサ素子部を駆動させる周期波形を回転角度センサに出力する信号発生回路35と、センサ素子部から得られた出力が入力されるコンパレータ31,32,33,34と、コンパレータからの出力が入力される演算回路40と、を有し、演算回路は、コンパレータから出力されるパルス波形をデジタル値として取り込むパルス入力端子を有し、パルス入力端子で取り込まれた値に基づき回転軸の回転角度と等価である磁界方向を演算し出力する構成とした。
(もっと読む)
ストローク量検出装置
【課題】 鉄粉等の磁性異物の付着による検出精度への影響を低減するストローク量検出装置を提供する。
【解決手段】 第1磁石21および第2磁石22は、対向する磁極同士が異なる極性となるように着磁され、直進軸xに対して一方の側に、基準軸yに対して傾斜して配置される。直進軸xに近い側に配置される開放端21aと開放端22aとの距離は相対的に長く、直進軸xから遠い側に配置される間隙端21bと間隙端22bとの距離は相対的に短い。間隙端21bと間隙端22bとの間には、小エアギャップ4が形成される。これにより、装置に混入した鉄粉Feが間隙端21bと間隙端22bとに付着したとき、開放端21aと開放端22aとの間の磁束ベクトル方向は変化しない。よって、磁気抵抗素子5の出力に影響を及ぼすことなく、ストローク量検出装置1の検出精度が維持される。
(もっと読む)
磁気センサ
【課題】 磁界の強度の影響を排除し、該磁界の向きを角度として正確に検出し得る磁気センサを提供する。
【解決手段】 第1のセンサ部120は、測定対象である磁界により磁化飽和する1以上の磁気抵抗効果素子を含み、磁界の向きに応じた角度信号V1,V2を出力する。第2のセンサ部130の磁気抵抗効果素子30は、測定対象である磁界Bにより磁化飽和しないから、その特性上の不飽和領域、すなわち、磁界の強度変化に対して出力電圧が線形に変化する領域において磁界の強度を検出することができる。本発明に係る磁気センサは、強度信号V3に従って角度の算出値を補正するから、測定対象である磁界Bの強度Hに依存する角度誤差を低減し、正確に磁界の向きを角度として検出することができる。
(もっと読む)
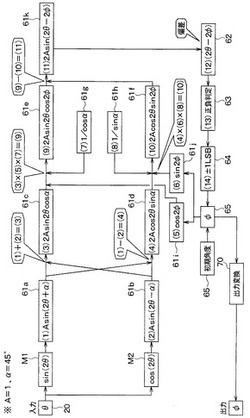
回転センサ
【課題】構造誤差等に起因する位相ずれを反映して相対回転角度をより正確に演算し得る回転センサを提供する。
【解決手段】回転センサ1において、角度演算部60は、複数の磁電変換素子から出力されるsinNθ信号及びcosNθ信号に対して予め設定されたずれ量αが反映されたsin(Nθ+α)信号及びsin(Nθ−α)信号を生成しており、sin(Nθ+α)信号及びsin(Nθ−α)信号に対して、ずれ量αに応じた補正値を用いて補正を行うことでsin(Nθ−Nφ)信号を生成し、且つsin(Nθ−Nφ)信号に基づく偏差(Nθ−Nφ)が所定値になるようにフィードバック制御を行って相対回転角度θを演算している。
(もっと読む)
回転角センサ
【課題】体格の増大が抑制された回転角センサを提供する。
【解決手段】磁化方向が固定された固定層(15)と、被検出体の生成する外部磁界の向きに応じて磁化方向が変化する自由層(13)との間に、非磁性の中間層(14)が挟まれた磁気抵抗効果素子(10)を有し、該磁気抵抗効果素子(10)の抵抗値変化に基づいて、被検出体の回転角を検出する回転角センサであって、固定層(15)と自由層(13)との対向方向に直交する平面に沿う面積が、固定層(15)よりも自由層(13)の方が大きく、固定層(15)の全てと、自由層(13)の一部とが、中間層(14)を介して対向している。
(もっと読む)
ロータリエンコーダ
【課題】マグネットと感磁素子とからなる対を複数組、回転軸線方向の一方側に設けた場合でも高い分解能を得ることのできるロータリエンコーダを提供すること。
【解決手段】ロータリエンコーダ1において、回転体2には、N極とS極とが周方向において1極ずつ着磁された第1マグネット20と、第1マグネット20に対して径方向の外側で離間する位置でN極とS極とが周方向において交互に複数着磁された環状の第2マグネット30とが設けられ、固定体10には、第1マグネット20に対して回転軸線方向Lの一方側L1で対向する第1感磁素子40と、第2マグネット30に対して回転軸線方向Lの一方側L1で対向する第2感磁素子60とが設けられている。第1マグネット20と第2マグネット30の間には、これらのマグネットより回転軸線方向Lの一方側L1に向かって突出している環状のシールド部材70が設けられている。
(もっと読む)
1 - 10 / 28
[ Back to top ]