
国際特許分類[G01P3/64]の内容
物理学 (1,541,580) | 測定;試験 (294,940) | 直線速度または角速度,加速度,減速度,または衝撃の測定;運動の有無,または方向の指示 (7,765) | 直線速度または角速度の測定;直線速度の差または角速度の差の測定 (1,568) | 一定距離の走行時間測定によることによって特徴づけられた装置 (68)
国際特許分類[G01P3/64]の下位に属する分類
国際特許分類[G01P3/64]に分類される特許
1 - 10 / 21
搬送速度算出装置および搬送速度算出方法
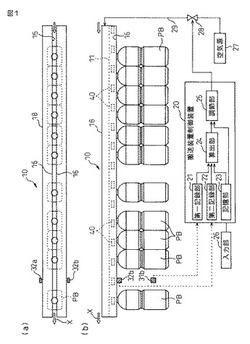
【課題】搬送速度に加えて、被搬送物が何個連なっているのかを把握する。
【解決手段】エア搬送装置により被搬送物(PB)を搬送し、被搬送物を搬送方向における被搬送物の幅方向最大箇所が通過する平面上に配置された第一投光器(31a)から投光されて、第一受光器(31b)により受光される光が被搬送物の搬送方向における幅方向最大箇所により遮光された遮光回数及び遮光時間を第一記録部(21)に記録し、幅方向最大箇所とは異なる幅方向箇所が通過する平面上に配置された第二投光器(32a)から投光されて、第二受光器(32b)により受光される光が被搬送物の搬送方向における幅方向最大箇所により遮光された遮光回数及び遮光時間を第二記録部(22)に記録し、第一及び第二記録部により記録された遮光回数及び遮光時間に基づいて、搬送される被搬送物の搬送速度と、に加えて、被搬送物が何個連なっているのかを算出する。
(もっと読む)
変位計測装置

【課題】クロストークによる検出誤差を軽減し、移動体の高帯域速度変動を高精度に検出することができる変位計測装置を得る。
【解決手段】移動体に設けた光学的に識別可能なマークを照明する第1の発光部と前記マークを介した光を検出する第1の受光部とを備える第1の検出部と、前記第1の検出部に対して前記移動体の移動方向に所定の間隔を隔てて配置され、前記マークを照明する第2の発光部と前記マークを介した光を検出する第2の受光部とを備える第2の検出部と、前記第1の発光部と、前記第2の発光部を時分割で発光させる時分割発光手段と、前記マークのうち同一のマークを前記第1、第2の検出部で各々検出する第1のタイミングと前記第1のタイミングと異なる第2のタイミングを検出する検出手段と、前記検出手段で得られた前記第1のタイミング及び前記第2のタイミングを用いて前記移動体の移動速度を算出する速度算出手段と、を有する。
(もっと読む)
通過時刻推定装置、車速算出方法、及びプログラム
【課題】主桁の通過中に測定対象車両が加減速した場合にも、当該測定対象車両の主桁への進入時刻・主桁からの退出時刻を推定する。
【解決手段】通過時刻特定部110は、進入側車軸検知用ひずみ計20が出力するひずみ値から、測定対象車両が進入側車軸検知用ひずみ計20の直上を通過した時刻を特定する。次に、ひずみ値特定部113は、当該時刻に軸重算出用ひずみ計10が出力するひずみ値を特定する。そして、低相関時時刻推定部114は、ひずみ値特定部113が特定したひずみ値を用いて、測定対象車両が主桁に進入した時刻及び退出した時刻を推定する。
(もっと読む)
走行速度検出装置
【課題】車両の走行速度を適切に検出できる走行速度検出装置を提供する。
【解決手段】鉄道車両1の第1、第2の輪軸21,22の上下加速度を検出する第1、第2の加速度センサ101,102と、第1、第2の加速度センサが検出した加速度履歴の類似度が最大となる時間差kに基づいて対地速度を算出する対地速度算出部120と、輪軸の回転速センサ110の出力と所定の車輪径とに基づいて車輪周速度を算出する周速度変換部140と、対地速度及び車輪周速度に基づいて鉄道車両の走行速度を出力する走行速度出力部160とを備える構成とする。
(もっと読む)
列車速度計測システム
【課題】 この発明は、カメラを使用して映像を取得しマッチング処理することによって、通常走行時はもとより、車軸空転時にも、より正確な対地速度を計測することのできる列車速度計測システムを得ることを目的とする。
【解決手段】 線路には基準マーク2が設けられており、これを撮影するカメラ5で撮影し、撮影された画像又は映像をマッチング処理して基準マーク2を画像処理部4で抽出する。画像処理部4により抽出した基準マークに基づき得られる距離情報及びカメラによる撮影フレームの時間情報によって、演算部3は列車速度を演算する。このような列車速度の計測によって、通常走行時はもとより、車軸空転時にも、より正確に対地速度を計測する。
(もっと読む)
走行速度検出装置およびこれを備える動力伝達装置
【課題】振動や騒音を確実に抑制することに寄与することができる走行速度検出装置を提供する。
【解決手段】第1および第2のプーリ2,3間に巻き掛けられたチェーン4の弦領域4bの振動を抑制するスタビライザ17が、弦領域4bを挿通させる挿通路25を区画し、弦領域4bによって支持されている。弦領域4bの姿勢変化等に対する追従性の高いスタビライザ17に、第1および第2の変位センサ18,19を支持した。変位センサ18,19は、チェーン4の走行に伴う凹凸変化に基づいて走行速度Vに相関のある信号を出力する。
(もっと読む)
飛翔体速度検出システム、摺動装置および飛翔体速度検出方法
【課題】簡易かつ安価な構成で、飛翔体の貫通によって供試体の破片や粉塵が飛散する場合においても、飛翔体の残留速度を確実に特定する。
【解決手段】飛翔体速度検出システム100は、供試体122への飛翔体112の打ち込み試験における供試体を貫通した後の飛翔体の残留速度を検出すべく、飛翔体の飛翔方向に対向する面が露出された緩衝材132を支持する筐体134と、飛翔体の飛翔方向に移動自在に筐体を摺動させる摺動機構136とを有する飛翔体より質量が大きい摺動装置130と、飛翔体が緩衝材に到達した後の摺動装置の移動速度を測定する速度測定装置140と、測定された摺動装置の移動速度と、摺動装置と飛翔体との質量比とに基づいて、運動量保存の法則を用い飛翔体の残留速度を特定する速度特定装置150とを備える。
(もっと読む)
磁気センサ装置及びこれを用いた電子機器
【課題】セット基板上の実装面積の縮小やハンドリング数の削減を実現し、ターゲットの運動解析精度を向上することが可能な磁気センサ装置およびこれを用いた電子機器を提供。
【解決手段】磁気センサ装置1は、ホール素子10X,10Y、切替スイッチ回路20X,20Y、増幅回路30X,30Y、サンプルホールド回路40X,40Y、比較回路50X,50Y、ラッチ回路60X,60Y、出力回路70X,70Y、制御回路80X,80Y、発振回路90と、を単一の半導体チップに集積化して成る。ホール素子10X,10Yは、所定の素子間距離dを隔てて配置され、各々検知された磁界の強度ないしは極性に応じて各々の論理レベルが変化する複数の出力信号OUTX、OUTYを各々生成する。
(もっと読む)
携帯通信端末
【課題】携帯通信端末を歩数計として用いた場合の歩行距離算出の精度を高める。
【解決手段】携帯通信端末1が歩行モニタリング動作を開始し、制御部22は終了操作がなければ計時部25をリセットして(ステップS2)、さらに10分が経過していなければ歩数カウンタをリセットする(ステップS4)。制御部22は、10分にわたって歩数計28が10歩計数するごとに平均ピッチを算出し(ステップS6)、10分経過後にGPS受信部26に測位を実行させると共に、10分のインターバルごとの平均ピッチ、歩行距離等を算出する(ステップS7)。制御部22は算出した平均ピッチを予め定めた歩行ランクに分類し(ステップS8)、該当ランクの連続歩行距離、積算歩行距離、積算平均速度等のデータを更新する(ステップS9)。
(もっと読む)
球体の非接触式3軸角速度計測法
【課題】高速回転する球状物体の角速度ベクトルを非接触で計測する手法およびその機構に関するものである。
【解決手段】球体に、目的に応じて選択した適当な物理量の偏向を与えるマーカーをつけ、球体の周囲に配置したセンサによってこれを計測することによって、球体の角速度ベクトルを算出するものである。また、従来の手法においては限定的であった、回転軸方向の計測可能範囲を大幅に拡大するものである。
(もっと読む)
1 - 10 / 21
[ Back to top ]