
国際特許分類[G01P7/00]の内容
物理学 (1,541,580) | 測定;試験 (294,940) | 直線速度または角速度,加速度,減速度,または衝撃の測定;運動の有無,または方向の指示 (7,765) | 加速度積算による速度測定 (24)
国際特許分類[G01P7/00]に分類される特許
11 - 20 / 24
絶対変位・速度計測用センサ
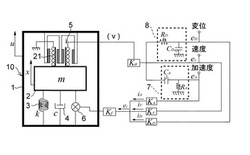
【課題】 建物の振動制御に適用できるような低振動数から測定でき、小型でも大地震の変位測定にも適用でき、しかもセンサの設置状況によって測定信号に直流分が生じない絶対変位・速度計測用センサを提供すること。
【解決手段】 本発明の絶対変位・速度計測用センサ10は、筐体1に内蔵され、ばね3及びダンパ4によって支えられた重り2と、それを計測範囲内で不動にするように作動するアクチュエータ6と、重り2と筐体1との間の速度を検出する相対速度センサ5と、重りの動きを制御するコントローラとからなる。
(もっと読む)
速度センサおよびその調整方法

【課題】慣性系で速度の検出ができる速度センサを提供する。
【解決手段】速度センサ10は2つの周波数信号発生源12を有しており、これらのうちの少なくとも1つが加速度検出素子である。そして一方の周波数信号発生源12が出力する周波数信号の位相と、他方の周波数信号発生源12が出力する周波数信号の位相とを予め所定量ずらしておいてもよい。また速度センサ10は、位相比較器18と低域通過フィルタ20を有している。位相比較器18は、各周波数信号発生源12の後段に接続しており、周波数信号の互いの位相差を求めている。低域通過フィルタ20は、位相比較器18の後段に接続しており、位相比較器18が出力する検波信号を直流化している。速度センサ10に加速度が加わると、加速度検出素子から出力する周波数信号の周波数が変化し、位相比較器18で検波される位相差も変化する。この位相差を直流化すると、速度を示す電圧値を得ることができる。
(もっと読む)
速度算出装置
【課題】勾配の小さい走行路上を移動する移動体の加速度等を精度よく算出できる速度算出装置を提供する。
【解決手段】2軸加速度センサ1を用いて移動体の速度を算出する速度算出装置において、2軸加速度センサ1の直交する2つの基準軸(X軸、Y軸)のうち、移動体の走行方向に対応する第1の基準軸の軸方向が、その移動体の走行方向に対して所定の角度、例えば、45°をなすように、2軸加速度センサ1を移動体内において傾けて設置する。そして、これら2つの基準軸それぞれについて2軸加速度センサ1に働く運動加速度成分より重力加速度成分を除去する演算を行うことで、移動体の真の加速度を算出する。
(もっと読む)
慣性センサ素子
【課題】脚部を励振しない状態で角加速度を検出する。
【解決手段】慣性センサ素子1は、板状の基部2と、第1、第2の検出脚部3,4と、枠状の支持部5と、第1の検出脚部3に形成された第1の貫通孔6と、第2の検出脚部4に形成された第2の貫通孔7と、検出電極とを備えている。角加速度検出手段は、角加速度による力に応じて発生した第1、第2の検出脚部3,4の歪みによる電圧信号を検出電極から受けて、この電圧信号を基に角加速度を検出する。
(もっと読む)
車両データを、とりわけホイールで走行する車両の速度を測定する装置
第1のセンサ(10)と第2のセンサ(20)を有するホイールで走行する車両の速度を測定するための測定装置。これら2つのセンサは同一のホイール(5)に取り付けられている。前記両センサとも、前記ホイール(5)の軸に対してそれぞれ垂直に作用し、互いに対してある角度をなす力を測定するように配置されている。さらに前記2つのセンサ(10,20)の測定値を受け取る評価装置(30)が設けられており、前記評価装置は前記両センサ(10,20)の測定値から前記ホイール(5)の車両走行方向における加速度を求める。  (もっと読む)
(もっと読む)
速度検出装置、速度検出方法、速度検出プログラム、位置検出装置、位置検出方法及び位置検出プログラム並びにナビゲーション装置
【課題】本発明は、加速度センサを用いて速度を高精度に算出できるようにする。
【解決手段】速度検出ユニット2は、GPS処理部4から位置情報PSを取得できない場合、(11)式に従って検出加速度αG、計測時間mt、時刻t0における速度V0、重力加速度g及び高度変化量Dhを用いた演算を行うことにより、(4)式に示した重力加速度成分gf、重力加速度g、高度変化量Dh及び距離Dmの関係を利用して当該進行方向成分gfを当該高度変化量Dhによって相殺することができるため、進行方向成分gfの影響を受けることなく高精度に速度Vを算出することができる。
(もっと読む)
運動量計算機能付き携帯機器
【課題】 GPS、PHS等の機能を必要とせずに携帯する人の正確な運動量を測定できる運動量計算機能付き携帯電話を提供する。
【解決手段】 加速度を計測する三次元加速度センサ1と、計測された加速度データに基づいて移動速度及び移動距離を算出する移動距離計算部2と、三次元加速度センサ1により計測された加速度データに基づいて振動データを算出し、この振動データ及び移動距離計算部の算出した移動速度に基づいて移動手段を推測する移動手段推測部3と、移動速度、移動距離及び移動手段に基づいて運動量を算出する運動量計算部5と、この運動量計算部5の算出した運動量を表示する表示処理部7とを備える。
(もっと読む)
加速度を利用した処理装置
【課題】車両の前後方向の加速度から高精度の距離を求める。
【解決手段】車両の前後方向の加速度に含まれる誤差をHPFで補正する加速度補正処理を行い、補正後の加速度を積分して速度を得る速度算出処理を行う。また加速度の過去n秒間の分散を求め、停止中フラグがセット状態で分散が停止中閾値以上であれば停止中フラグをクリアし、クリア状態で分散が走行中閾値以下であれば停止中フラグをセットする停止判定処理を行い、この停止中フラグがセット状態であれば速度をゼロに補正し、クリア状態であれば速度が閾値1≦速度≦閾値2となるように補正して、補正前後の速度差から速度誤差量を求める速度補正処理を行う。そして補正後の速度を積分して距離を求める距離算出処理を行い、この距離から速度誤差量に基づいて求めた距離誤差量を引いて補正後の距離を求める距離補正処理を行う。
(もっと読む)
加速度を利用した処理装置
【課題】車両の前後方向の加速度から高精度の距離を求める。
【解決手段】車両の前後方向の加速度に含まれる誤差をHPFで補正する加速度補正処理を行い、補正後の加速度を積分して速度を得る速度算出処理を行う。また加速度の過去n秒間の分散を求め、停止中フラグがセット状態で分散が停止中閾値以上であれば停止中フラグをクリアし、クリア状態で分散が走行中閾値以下であれば停止中フラグをセットする停止判定処理を行い、この停止中フラグがセット状態であれば速度をゼロに補正し、クリア状態であれば速度が閾値1≦速度≦閾値2となるように補正して、補正前後の速度差から速度誤差量を求める速度補正処理を行う。そして補正後の速度を積分して距離を求める距離算出処理を行い、この距離から速度誤差量に基づいて求めた距離誤差量を引いて補正後の距離を求める距離補正処理を行う。
(もっと読む)
角加速度検出器とそれを用いた速度検出方法
【課題】低い回転速度での速度検出分解能、速度応答性、サーボ性能を向上させる角加速度検出器とそれを用いた速度検出方法を提供する。
【解決手段】モータ軸に取り付けられ位置検出用スリット8と角加速度検出用スリット9を備えた位置検出用ディスク2と、弾性体5を介してモータ軸に取り付けられ角加速度検出用スリット9と同一位置に同一スリットを持つ角加速度検出用ディスク6と、モータ軸側の位置検出用スリット8に光を照射する第1発光ダイオード1と、位置検出用スリット8を通過した光を受光する固定子側に設けられた第1フォトダイオード3と、モータ軸側の角加速度検出用スリット9に光を照射する第2発光ダイオード4と、角加速度検出用スリット9を通過した光を受光する固定子側に設けられた第2フォトダイオード7とからなる角加速度検出器において、弾性体5に弾性体の変形を制限する方向に弾性粘性体を設けたことを特徴とする角加速度検出器。
(もっと読む)
11 - 20 / 24
[ Back to top ]