
国際特許分類[G01S13/52]の内容
物理学 (1,541,580) | 測定;試験 (294,940) | 無線による方位測定;無線による航行;電波の使用による距離または速度の決定;電波の反射または再輻射を用いる位置測定または存在探知;その他の波を用いる類似の装置 (17,599) | 電波の反射または再放射を使用する方式,例.レーダ方式;波長または波の性質が無関係または不特定の波の反射または再放射を使用する類似の方式 (5,353) | 電波の反射を使用する方式,例.一次レーダ方式;類似の方式 (1,818) | 物標の相対運動に基づく測定方式 (469) | 固定物体と移動物体の弁別または異なる速度で移動する2以上の物体の弁別 (237)
国際特許分類[G01S13/52]の下位に属する分類
断続パルス変調波の送信を用いるもの (63)
持続非変調波,振幅―,周波数―,または位相変調波の送信を用いるもの (7)
連続するアンテナ走査間で動かなかった物体を除去するもの,例.エリアMTI (1)
存在探知のためのもの (129)
国際特許分類[G01S13/52]に分類される特許
1 - 10 / 37
レーダ装置
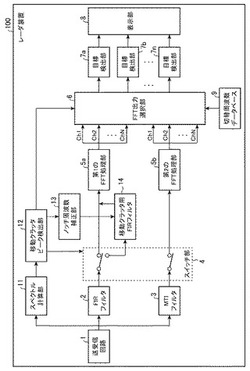
【課題】クラッタ抑圧性能と目標信号保存性能を両立させると同時に、静止クラッタと移動クラッタを抑圧することができるレーダ装置を得る。
【解決手段】受信信号の静止クラッタを抑圧するFIRフィルタ2と、受信信号の静止クラッタを抑圧するMTIフィルタ3と、ノッチ周波数補正部13が調整したフィルタ係数を用いて、FIRフィルタ2の出力信号の移動クラッタを抑圧する移動クラッタ用FIRフィルタ14と、FIRフィルタ2または移動クラッタ用FIRフィルタ14の出力信号に対してコヒーレント積分を行う第1のFFT処理部5aと、MTIフィルタ3の出力信号に対してコヒーレント積分を行う第2のFFT処理部5bと、移動クラッタピーク検出部12の検出結果に基づいて、第1のFFT処理部5aからの出力信号と第2のFFT処理部5bからの出力信号のいずれか一方の出力信号を選択するFFT出力選択部6とを備えた。
(もっと読む)
クラッタ除去器、レーダ装置、クラッタ除去方法およびクラッタ除去用プログラム

【課題】物標とクラッタ源との相対速度差が小さいときにも十分にクラッタを抑圧することである。
【解決手段】ドップラシフト周波数推定部331aは、反射体からの複素受信信号I,Qに基づいて反射体のドップラシフト周波数を推定して、推定した値をドップラ推定値ωとする。擬似スペクトル生成部331bは、ドップラ推定値ωに対応する信号強度を複素受信信号I,Qに基づいて与えることにより、擬似スペクトルUを生成する。CFAR処理部332は、クラッタの抑圧処理を、擬似スペクトルUを用いて行なう。
(もっと読む)
物体検出装置および物体の検出方法
【課題】レーダ装置の検知範囲に含まれている物体を、その物体の移動速度に関わらず検知する。
【解決手段】実施形態に係る物体検出装置は、送信部、受信部、移動物体検出部、および、微動物体検出部を備える。送信部は、レーダパルスを送信する。受信部は、物体からのレーダパルスの反射波を受信する。移動物体検出部は、受信部が第1の時間の間に受信した受信信号を解析することにより、移動している移動物体を検出する。微動物体検出部は、第1の時間よりも長い第2の時間の間に、受信部が受信した受信信号を解析することにより移動物体に比べて移動量が微小な微動物体を検出する。
(もっと読む)
レーダ装置
【課題】クラッタ抑圧性能と目標信号保存性能を両立させる。
【解決手段】送受信アンテナを有する送受信回路1と、送受信回路1から入力される受信信号を入力して、その中のクラッタを抑圧する複数のFIRフィルタ2と、各FIRフィルタ2の出力信号をフーリエ変換する複数のFFT手段3と、FFT手段3の出力の中から、目標信号検出に使用するFFT出力結果を選択するFFT出力選択手段4と、FFT出力選択手段4の出力結果を用いて目標信号を検出する複数の目標検出手段5と、目標検出結果を表示する表示手段6と、FFT出力選択手段4でFFT出力結果を選択するために用いる切替周波数を記憶する切替周波数データベース7とを備え、FIRフィルタ2の振幅特性は全て互いに異なる。FFT出力選択手段4は、振幅利得の最も高いFIRフィルタ2の出力を用いるようにFFT手段3の出力を切り替える。
(もっと読む)
レーダ装置
【課題】PRIを変えることなく、目標相対速度および所望のクラッタ抑圧性能に応じて、送信波形諸元を適応的に変化させるレーダ装置を得る。
【解決手段】目標相対速度情報取得手段1と、パルス繰返し周期を変えることなく、目標相対速度Vdに対するクラッタ抑圧処理損失を低減するための送信波形諸元を生成する送信波形制御器2と、任意周波数発振器3と、90度ハイブリッド器8と、送信機4と、送信機からの信号を目標に照射して反射された信号を受信するアンテナ5と、分配器6と、位相検波器7a、7bと、低域通過フィルタ9a、9bと、A/D変換器10a、10bと、ビデオ信号記憶手段11と、MTI処理器12と、目標相対速度Vdを用い、クラッタ抑圧処理された信号を補正する相対速度補正処理器13と、合成帯域処理器14と、目標距離Rを計測する目標検出処理器15とを備える。
(もっと読む)
レーダ装置
【課題】ヒット数を減少させることなくクラッタ抑圧を行い、全ヒット数を用いたパルス間コヒーレント積分処理が可能なレーダ装置を得る。
【解決手段】送信機1と、アンテナ3と、受信機4と、受信機4からのアナログ受信信号をディジタル化した受信信号に変換するAD変換器5と、ヒット数Hおよびドップラ帯域幅Bcに基づき、非クラッタ部分空間への射影行列Pnullを求めるクラッタ抑圧行列計算手段6と、AD変換器5からの受信信号xh(n)と射影行列Pnullとを用いて、受信信号xh(n)に含まれるクラッタを抑圧しつつ目標信号をヒット方向に積分するパルス間コヒーレント積分処理を行うクラッタ抑圧手段7と、パルス間コヒーレント積分値y(n)を入力情報として、所定の目標検出処理を行う目標検出手段8、を備える。
(もっと読む)
レーダ装置
【課題】 従来のレーダ装置は、目標とクラッタをドップラ周波数で分離し、狭帯域フィルタを通過した目標の電力で利得制御を行っていたため、電力が大きいクラッタを受信した時に、受信系が飽和するという問題があった。
【解決手段】 受信系の初段に阻止帯域の異なる複数のノッチフィルタを備え、外部に備えた速度センサ及び姿勢角センサからの情報をもとにクラッタ周波数を計算し、適合する阻止帯域のノッチフィルタを選択する。選択したノッチフィルタは、受信した目標信号のみ通過させ、クラッタを減衰させる。これにより、クラッタにより受信系が飽和する問題を解消する。なお、受信系の初段にフィルタを配置すると、NFが劣化し、低S/Nの目標の検出が困難になる問題があるため、高度が低くクラッタ電力が大きい時のみ、ノッチフィルタを通過させるよう、切換えを行う。
(もっと読む)
レーダ信号処理装置
【課題】気象エコーのドップラ速度が小さい場合でも、気象エコーの減衰を招くことなく、不要な地形エコーのみを除去可能なレーダ信号処理装置を得る。
【解決手段】時刻t1、t2での観測データDt1、Dt2を格納する観測データ格納手段1a、1bと、観測データDt1、Dt2からドップラ速度V1、V2を算出するドップラ速度算出手段2a、2bと、ドップラ速度V1、V2からドップラ0分布R1、R2を作成するドップラ0分布作成手段3a、3bと、ドップラ0分布R1、R2から補正エコー分布Rcを作成する補正エコー分布作成手段4と、観測データDt2に対して通常のクラッタ除去処理を行い、クラッタ除去後の観測データDt2’を生成するクラッタ除去手段5と、観測データDt2とクラッタ除去後の観測データDt2’と補正エコー分布Rcとを合成して補償観測データDcを取得するエコー補償手段6とを備えている。
(もっと読む)
パルスドップラレーダ装置
【課題】使用形態の変更を自動的に判定して使用条件を切り替えるパルスドップラレーダ装置を提供する。
【解決手段】判定・制御部110は、使用形態判定手段111と、パルス幅選択手段112と、帯域制限幅選択手段113とを有しており、使用形態判定手段111が自車両の所定の制御装置からギア状態の信号を入力して使用形態の判定を行っている。使用形態判定手段111の判定結果に基づいて、パルス幅選択手段112および帯域制限幅選択手段113がそれぞれ広帯域インパルス生成部120および帯域幅制限部150を制御している。
(もっと読む)
広帯域レーダ装置
【課題】レーダ装置に関し、特に、超広帯域の電波を送受信して移動物体等の目標の位置を高精度で検出する広帯域レーダ装置に関し、複数の受信波を合成して目標物体の距離や方位等を検出するレーダ装置において、送信及び受信アンテナ間の距離が小さく、目標物体が広帯域レーダ装置から距離が離れた場合でも、目標物体の方位精度を高めた小型かつ超広帯域レーダ装置を得る。
【解決手段】2つの受信アンテナ部で受信した2つの受信パルス信号が、サンプリング積分検波されて2つのデジタル信号に変換された後、移動物体を検出した2つの応答差分信号が得られる。2つの信号から、任意の距離離れた第1の仮想受信アンテナ部及び第2の仮想受信アンテナ部で受信する擬似応答差分信号が算出される。この信号を用いて移動目標の距離と方位を検出することで、目標物体の距離がある程度離れても、方位精度を高めることができる。
(もっと読む)
1 - 10 / 37
[ Back to top ]