
国際特許分類[G01S13/68]の内容
物理学 (1,541,580) | 測定;試験 (294,940) | 無線による方位測定;無線による航行;電波の使用による距離または速度の決定;電波の反射または再輻射を用いる位置測定または存在探知;その他の波を用いる類似の装置 (17,599) | 電波の反射または再放射を使用する方式,例.レーダ方式;波長または波の性質が無関係または不特定の波の反射または再放射を使用する類似の方式 (5,353) | レーダ追跡方式;類似の方式 (328) | 角度のみを追跡するためのもの (9)
国際特許分類[G01S13/68]に分類される特許
1 - 9 / 9
目標追跡システムとそのプログラム及び方法、角度追跡装置とそのプログラム及び方法、目標追跡装置とそのプログラム及び方法
【課題】装置規模の縮小、処理時間の短縮を実現する。
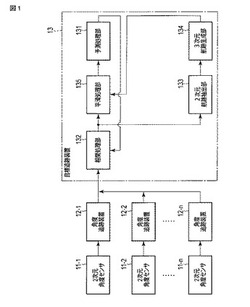
【解決手段】目標追跡装置13において、角度追跡装置12−iから2次元観測値と2次元航跡の対が入力されると、予測処理部131により、維持している3次元航跡から2次元予測値を算出し、相関処理部132により、算出された2次元予測値と角度追跡装置12−iからの2次元観測値の相関の有無を判定し、相関がないと判定された場合、2次元航跡抽出部133により、相関がないと判定された2次元観測値の対となる2次元航跡を抽出し、3次元航跡生成部134により、2次元航跡抽出部133で抽出した異なる角度追跡装置からの2次元航跡に基づいて、3次元航跡を生成する。一方、相関があると判定された場合、平滑処理部135により、相関があると判定された2次元観測値を用いて2次元予測値に対応する3次元航跡を更新する。
(もっと読む)
レーダ装置用の演算装置、レーダ装置、レーダ装置用の演算方法およびプログラム

【課題】演算処理の負荷を増大させることなく適切に到来方向を推定可能なレーダ装置用の演算装置、レーダ装置、レーダ装置用の演算方法およびプログラムを提供することを課題とする。
【解決手段】物標の方向を複数のアンテナ3の各受信信号に基づいて特定するレーダ装置1用の演算装置15であって、予め設定した分離可能数に応じた数の物標の角度を前記各受信信号から推定する所定の推定アルゴリズムを使い、任意の分離可能数を設定して前記所定の推定アルゴリズムによって得た物標の推定角度からモードベクトルを生成し、前記モードベクトルと前記各受信信号の入力ベクトルとから算出した直交成分の大きさに基づいて、設定した前記分離可能数の適否を判定する演算部6を備える。
(もっと読む)
飛しょう体の誘導装置
【課題】飛しょう体ロール時の空間安定性の劣化をさらに改善したAZEL切替測角方式の飛しょう体の誘導装置を提供する。
【解決手段】第1の方向の信号と第2の方向の信号とから異なるタイミングにて検出した第1の方向の補正前推定目視線角と第2の方向の補正前推定目視線角を算出し、機体レートとビーム指向角と第1のタイミングから第2のタイミングまでの時間間隔とから推定目視線角の変動量を算出し、変動量により第1の方向の補正前推定目視線角と第2の方向の補正前推定目視線角とを補正して第1の方向の推定目視線角と第2の方向の推定目視線角とを算出し、第1の推定目視線角と第2の推定目視線角とから誘導信号を算出する。
(もっと読む)
電波受信装置及び到来方向測定方法
【課題】ハードウェア規模を増大させることなく、受信電波の到来方向を高精度に測定可能にする。
【解決手段】電波受信装置において、制御部16は、アンテナ選択器9〜12に方位方向及び高低方向のアンテナ4,8,2,6からの受信波を選択させ、信号処理部15に振幅モノパルス方式を用いて到来方向の方位粗測角及び高低粗測角を算出させる粗測角制御と、アンテナ選択器9〜12に方位方向のアンテナ4,8,3,7からの受信波と高低方向に対応するアンテナ1,5,2,6からの受信波とを切り替えて選択させ、信号処理部15に振幅モノパルス方式及びインターフェロメータ方式を併用して到来方向の方位精測角及び高低精測角を算出させる精測角制御とを選択的に行う。
(もっと読む)
レーダ装置、及びターゲットの速度進行方向推定方法
【課題】特に、ターゲットの速度が遅いときに、精度の高いターゲットの速度、及び進行方向を推定できるレーダ装置を提供する。
【解決手段】ターゲットの速度、及び進行方向を推定して衝突予測を行うレーダ装置であって、所定の時間一定の周期でターゲットを捕捉するターゲット捕捉部と、ターゲット捕捉部が捕捉した捕捉点に基づいて、ターゲットの速度、及び進行方向を推定して衝突を予測する衝突予測部と、衝突予測部の推定したターゲットの速度が所定速度以下である場合、推定したターゲットの速度に応じてターゲットを捕捉する時間を増加させて捕捉点の数を増加させるターゲット捕捉制御部とを備え、衝突予測部は、前記ターゲット捕捉制御部が捕捉点の数を増加させた後の全ての捕捉点に基づいて、ターゲットの速度、及び進行方向を推定して衝突を予測する。
(もっと読む)
レーダ装置
【課題】 従来のレーダ装置は、マルチパス環境下で安定した追尾を行うため、誘導信号に重畳するノイズ成分を、ハイパスフィルター、ピークホールド回路等による補正を実施していたが、シンチレーション等により目標のS/Nが劣化した場合、マルチパスによる虚像からの反射波が支配的となり、虚像に誤ロック及び誤追尾するという問題があった。
【解決手段】 マルチパス判定部を備え、アンテナを振りながら目標と虚像の両方を受信し、アンテナ角度とロックオンフラグをマルチパス判定部に入力する。マルチパス判定部では、下方向から受信する信号を虚像と判定し、キャンセルする。これにより、マルチパスによる虚像に誤ロックする問題点を解消する。
(もっと読む)
パッシブコヒーレント探索アプリケーションにおいて、集中方式で関連付けし追尾するシステムおよび方法
【課題】PCLアプリケーション用の集中方式で関連付けおよび追尾するシステムおよび方法。
【解決手段】検出レポートは、ターゲット追尾処理システムで受け取られる。検出レポートは、早期の処理オペレーションにおけるターゲットエコーと関連付けられたライントラックと関係がある測定値を含む。さらに、パラメータおよびオブザーバブルなどの他の情報がターゲット追尾処理システムによって受け取られる。ターゲット追尾処理システムは、検出レポート内の測定値に従って、ライントラックについてライントラック関連付け機能部およびトラックフィルタリング機能部を実施する。これらのオペレーションはまた、追尾のために、ターゲットパラメータを予測し評価する。ターゲットパラメータは、伝搬させられ、更新されたターゲットトラックから外挿され、ユーザのためにディスプレイに供給されるか、または、さらに処理を行うために、PCLシステムに戻される。
(もっと読む)
飛しょう体の誘導装置
【課題】電波誘導において空間安定性能の良好な飛しょう体の誘導装置を提供すること。
【解決手段】所定の送信周期で電波を目標に向けて発射しその反射波を受信し、デジタルデータとして高速フーリエ変換し収集したデータを用いて計算して得た前記目標の誤差角と、慣性航法により求めた飛しょう体の姿勢角とから、目標への誘導を行う飛しょう体の誘導装置であって、前記収集するデータの送信周期に対するデータ取得時間の中心位置がデータ取得設定期間のほぼ中心位置になるように設定する。
(もっと読む)
レーダー装置
【課題】 受信系の構成を複雑化することなく、移動目標に対する測角精度を向上させたレーダー装置を提供する。
【解決手段】 移動体に搭載され、レーダー波を送信するとともに、指向性を有する空中線4を介して移動目標による反射波を受信し、受信信号に基づいて空中線4の指向方向を制御するレーダー装置1であって、受信信号を復調し、ビデオ信号を生成する受信機5と、移動体の移動速度に基づいて、移動体の移動によるビデオ信号の位相変動を補償する自機運動補償回路6と、受信信号に基づいて移動目標のレンジ方向に関する速度成分を求め、移動目標の移動によるビデオ信号の位相変動を補償する目標運動補償回路8と、各運動補償回路による位相変動補償後のビデオ信号に基づいて、ドップラー周波数を推定するドップラー周波数推定回路9と、ドップラー周波数に基づいて、移動目標の方位を判定する測角回路10により構成される。
(もっと読む)
1 - 9 / 9
[ Back to top ]