
国際特許分類[G01S15/60]の内容
物理学 (1,541,580) | 測定;試験 (294,940) | 無線による方位測定;無線による航行;電波の使用による距離または速度の決定;電波の反射または再輻射を用いる位置測定または存在探知;その他の波を用いる類似の装置 (17,599) | 音波の反射または再放射を使用する方式,例.ソーナ方式 (1,014) | 音波の反射を使用するもの (320) | 物標の相対運動に基づく測定方式 (60) | 速度または軌動の決定方式;運動のセンスの決定方式 (16) | 送信機および受信機が移動物体上に装備されているもの,例.対地速度,ドリフト角,対地軌動を決定するためのもの (8)
国際特許分類[G01S15/60]に分類される特許
1 - 8 / 8
車両存在報知装置

【課題】危険を知らせる必要のある歩行者等のみに車両2の存在を知らせる報知音を伝えることにより、危険を知らせる必要のない者に不快感を与えないようにするとともに、車両存在報知装置1単独で車速情報を得ることの可能な車両存在報知装置1を提供することにある。
【解決手段】車両存在報知装置1では、可聴音に応じて変調された超音波信号に基づき超音波を空中に放射することで報知音を発生させる。変調された超音波が空中を進む内に自己復調されて可聴音となるが、この自己復調された可聴音は超音波と同様に指向性がよく、危険を知らせる必要のある範囲にいる歩行者のみに報知音を伝えることができる。また、超音波信号または変調された超音波信号に基づき超音波を路面に向けて発信することで車速センサとして機能するセンサ用超音波トランスデューサ5、6を備えることにより、車両存在報知装置1単独で車速情報を得ることができる。
(もっと読む)
超音波測定装置及び超音波信号の評価方法
本発明は、受信装置(14)と比較装置(101)と評価装置(112)とを備えた超音波測定装置に関する。受信装置は、車両固有の超音波送信器及び/又は外部の超音波測定装置から受信した超音波信号の周期持続時間の時間経過に関する測定セットを決定する。比較装置は、決定された測定セットの少なくとも一つの基準セットからの偏差に関する比較情報を決定する。評価装置は、決定された比較情報を考慮して、超音波送信器から送出された信号形状、受信装置と外部の超音波送信器との間の相対速度、受信装置と車両固有の超音波送信器及び/又は外部の超音波測定装置との間の伝送経路内に存在する少なくとも一つの反射性の対象の相対速度、及び/又は、少なくとも一つの反射性の対象の形状の特徴的指標に関する情報を決定する。更に本発明は、超音波信号を評価するための方法に関する。 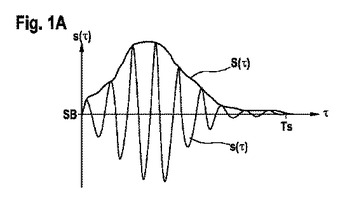 (もっと読む)
(もっと読む)
移動プラットフォームから波の特性を判定するためのシステム及び方法

移動プラットフォームから1つ又は複数の波の特性を判定するシステム及び方法が開示される。超音波ドップラー式多層流向流速計のようなソナー・システムは、プラットフォームに対する水の動きをプロファイルすることができ、地球基準は、固定された地球基準に対するプラットフォームの動きの測度を求めることができる。水のプロファイルと地球基準測度との両方は、プラットフォームの動きを補償するために協働的に採用することができる。方向波スペクトルと非方向波スペクトルは、線形波理論により水面高さスペクトルに翻訳し、且つ有意な波の高さ、ピーク周期、及びピーク方向のような特性を計算するのに用いることができる。 (もっと読む)
水中航走体の速度計測システム
【課題】マルチビームを用いることによって、一部の測深データを計測できなくても特徴箇所と速度を求められるようにする。
【解決手段】開示される水中航走体の速度計測システムは、水中航走体3に対してマルチビーム測深機301と、演算処理部310とを具えることによって、マルチビーム測深によって得られた水深メッシュデータから特徴箇所を検出するとともに、検出された特徴箇所から水中航走体の速度計算を行うことができるように構成されている。
(もっと読む)
水中ナビゲーションの方法およびシステム
【課題】水中ナビゲーションの方法を提供する。
【解決手段】この方法は、ナビゲーションシステムを使用して、第1の速度測定値を、第2の速度測定値を有する1または複数の信号ビームに沿って投影し、第2の速度測定値は1または複数の信号ビームの少なくともひとつに関係する。この方法では、少なくとも第2の速度測定値の予測に基づいて、ナビゲーションシステムに関連する物体の位置および場所を決定し、このナビゲーションシステムは、第1および第2の速度測定値の共分散に基づき規定の測定範囲内で機能するように調整される。物体の位置および場所を決定する際に行われる性能調整は、1または複数の外部環境条件の故に各信号ビームを維持するナビゲーションシステムとは独立に動作可能である。
(もっと読む)
潮流測定装置
【課題】絶対船速と対水船速との差から潮流を演算する際に、船舶の加減速及び回頭等があっても、常に安定した潮流を得ることができる潮流測定装置を提供する。
【解決手段】加減速検出手段45は、航法装置3から出力された絶対船速又は対水船速計測回路42から出力された対水船速に基づいて、船舶1が加速状態又は減速状態にあることを検出し、検出結果を加算器50に出力する。回頭状態検出手段46は、ジャイロコンパス2から出力された船首方位に基づいて、船舶1が回頭状態にあることを検出し、検出結果を加算器50に出力する。演算停止手段49の加算器50は、検出結果が入力されたときに、スイッチ51における潮流演算回路43と潮流値出力回路44との接続状態をオン状態からオフ状態に切り替えるように該スイッチ51を制御する。
(もっと読む)
潮流測定装置
【課題】絶対船速と対水船速との差から潮流を演算する際に、船舶の加減速及び回頭等があっても、常に安定した潮流を得ることができる潮流測定装置を提供する。
【解決手段】平均化時定数補正手段47は、対水船速に対する平均化処理の時定数と、絶対船速に対する平均化処理の時定数とが互いに異なる場合に、前記各時定数のうち少なくとも一方の時定数を補正するための所定の補正処理を行う。遅延補正手段48は、潮流演算回路43にて潮流を演算する際に、潮流演算回路43に対する対水船速の入力と、潮流演算回路43に対する絶対船速の入力との間で時間差がある場合に、前記時間差を補正する。
(もっと読む)
潮流測定装置及び潮流測定方法
【課題】対地速度と対水速度の差から潮流を測定する潮流測定装置において、船体の動揺に起因する超音波信号の送波時と受波時における船体位置の相違を潮流測定演算時に補正し、動揺誤差を是正した正確な潮流測定を行うことができる潮流測定装置を提供する。
【解決手段】 GPS受信機4を用いて測定した超音波信号の送信時、対水信号周波数の測定時、及び対地信号周波数の測定時における正確な対地船体速度を用いて、対水信号周波数から算出される対水速度、及び対地信号周波数から算出される対地速度の動揺誤差を補正する。これにより、船体の動揺が潮流測定に与える影響を防ぎ、正確な潮流を得ることが可能になる。
(もっと読む)
1 - 8 / 8
[ Back to top ]