
国際特許分類[G01S15/66]の内容
物理学 (1,541,580) | 測定;試験 (294,940) | 無線による方位測定;無線による航行;電波の使用による距離または速度の決定;電波の反射または再輻射を用いる位置測定または存在探知;その他の波を用いる類似の装置 (17,599) | 音波の反射または再放射を使用する方式,例.ソーナ方式 (1,014) | ソーナ追跡方式 (29)
国際特許分類[G01S15/66]に分類される特許
11 - 20 / 29
自動追尾スキャニングソナー
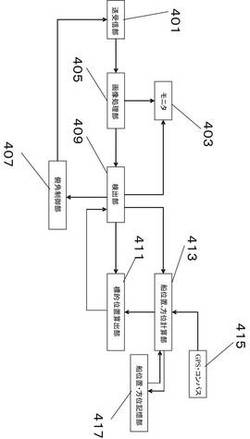
【目的】
ソナーにおいて送信波が標的に反射してから自船の探知部に到達するまでの間に、自船が移動してしまうことによる誤差を抑える。
【構成】
自動追尾スキャニングソナーにおいて、GPS及びコンパスの指示値の時系列データを保持するメモリを有し、過去の任意の時刻における自船の緯度、経度、船首方位を推定することができる船位置・方位計算部と、標的からの反射波を自船で受信した時刻における標的の緯度、経度、水深を算出する標的位置算出部とを備える事を特徴とするスキャニングソナー。
(もっと読む)
目標信号検出装置及び目標信号検出方法

【課題】目標の位置を予測する閾値を制御することにより、目標を安定して検出することができる目標信号検出装置を得ることにある。
【解決手段】送受波器は、水中に音波を発信し、目標からの反響音を受信処理する。信号処理部は、受信信号が有する複数の要素を抽出し、抽出した特徴素を複数の時系列信号として出力する。信号検出部は、時系列信号の目標らしき信号を抽出し、特徴素を算出する。目標検出部は、時系列信号ごとに目標信号を統合して位置を算出する。目標類別部は、統合された各特徴素に対して重み付けを行い、統合された目標信号の目標らしさの程度を示す確信度を算出する。目標追尾部は、目標の予測位置を算出し、実際に検出した目標との相関を実施する。目標検出最適化処理部は、目標の予測位置を利用し、信号検出部を最適化する。
(もっと読む)
自動追尾スキャニングソナー
【課題】 標的を見失うことなく迅速に追尾可能な自動追尾スキャニングソナーを提供する。
【解決手段】 直前に探査した魚群Tの重心G1を中心としてエコーを解析するエリアを探査エリアWとし、この探査エリアWを順次拡大して魚群Tの位置を探査し、探査した魚群Tの重心G2を次の探査における探査エリアWの中心とする。さらに、探査エリアWを所定の大きさまで拡大しても魚群Tの位置を探査できない場合には、送受信ビームTB、RBの俯角θを順次変えて魚群Tの位置を探査する。
(もっと読む)
自動追尾スキャニングソナー
【目的】
探査範囲を魚群の上下移動に合わせて俯角を調整することが可能とし、魚群の追尾性能が向上させる。
【構成】
自動追尾スキャニングソナーにおいて、傘状送波ビームとペンシル上受波ビームを用いて水平スキャンを実行する送受波部と、断面画像構成部と、魚群像抽出部と、魚群像位置情報算出部と、俯角−蓄積反応強度記憶部と、水平断面上動き予測部と、探査範囲制御部と、からなることを特徴とする自動追尾スキャニングソナーであり、魚群が垂直移動をした場合にも、魚群を見失わない。
(もっと読む)
状態変化検出装置および状態変化検出プログラム
【課題】監視対象の状態ベクトルを用い、F検定で状態変化を検出する方法では、観測対象が状態を変えてから観測者がその変化を検出するまでに多くの時間を要した。
【解決手段】監視対象の観測値と推定観測値との残差を計算し、監視対象が状態を変えていないモデルと、監視対象が状態を変えているモデルを定式化し、両者のAIC(赤池情報量規準)を演算して、AICが小さい側のモデルを、より尤もらしいと判断することで、短時間でも監視対象の状態変化を検出する事が可能となる。
(もっと読む)
追尾処理装置及びその方法並びにプログラム
【課題】 追尾フィルタに入力する追尾信号を有効に活用し、また各センサに対する時刻毎のそれぞれの潮流の影響を考慮して目標状態量の推定を精度良く行う。
【解決手段】 追尾信号として実際には存在しない遅延時刻(t−1)から現在時刻tまでの追尾信号、すなわち周波数情報f3(t−1),f3(t),f2(t)を、予測追尾信号外挿処理6において目標の状態量から予測し、この予測した周波数情報を新たな周波数情報として追尾フィルタ3に供給することにより、現在時刻tにおける周波数情報を得る。また、浮遊するGPS搭載のセンサから時々刻々の各センサ位置を正確に入手し、センサ毎、時刻毎の潮流情報u3(t−1),u3(t),u2(t)を周波数情報に加えて追尾信号として追尾処理を行う。時間遅延に対して追尾信号を予測する際、目標の状態量に加え、得られた各センサの潮流情報を含めて、周波数情報を算出する。
(もっと読む)
起き上がり予兆検知装置
【課題】ベッドの起き上がり動作を早く正確に検出することができる起き上がり予兆装置を提供する。
【解決手段】本発明は、ベッドに温度或いは温度変化を検知する温度センサと、距離を測定する距離センサとを具備する複数のセンサセットを設ける。そして、複数のセンサセットからのセンサ値に対してクラスタリング処理を実行し(S33)、最もヘッドボードに近いクラスタを選出する(S34)。その後、選出したクラスタの重心座標を算出し(S35)、この算出された重心座標が属する領域を判定し(S36)、重心座標が属する領域が変化し、起き上がり予兆動作の際の領域遷移に沿って起き上がり予兆状態に遷移した場合(S37〜S38)に、起き上がり予兆を検知する。
(もっと読む)
自動追尾スキャニングソナー
【課題】予測した魚群予測位置を捉えるように次回の水平スキャンにおける俯角θを制御するとともに、予測に誤差が含まれる場合にもより良い俯角に自動的に回復させることができる魚群追尾スキャニングソナーを提供すること。
【解決手段】標的である魚群を次回俯角を予測して予測追尾を行うとともに、魚群エコー強度総和が小さくなった場合には、現在の俯角から指定された所定の角度範囲内で受波ビームの俯角を振って追尾再開条件を満たす魚群エコー強度総和が得られる俯角を追尾再開時俯角として決定し、この追尾再開時俯角を基準として予測追尾を再スタートする。
(もっと読む)
追尾システムおよび自走体
【課題】移動体とそれを追尾する自走体とを結ぶ直接経路が障害物によって遮断された場合にでも、移動体の相対位置を推定できる追尾システムを提供する。
【解決手段】移動体に配置されたトランスポンダと、トランスポンダを追尾する自走体とを含む追尾システムであって、自走体は、周囲の床面あるいは天井面に関する反射環境情報を入手する環境検知手段を備える。自走体は、第1の超音波を送信し、それを受信したトランスポンダは第2の超音波を送信し、次いで第2の超音波を受信することによって、トランスポンダから自走体に直接届く直接波と床面あるいは天井面を介して届く反射波とに関する受信情報を入手し、さらに受信情報と反射環境情報とを用いて、受信された第2の超音波が直接波であるか反射波であるかの判断を行い、その判断に基づいて受信情報を処理してトランスポンダの位置を推定し、追尾する。
(もっと読む)
送信モードリコメンドシステム、ソーナーシステム、送信モードリコメンド方法、そのプログラム及び記録媒体
【課題】広帯域の送信音波に対する探知距離、探知領域、目標存在圏のカバー率を短時間で算出し、かつ、残響レベルを実際の観測結果を利用して計算し、精度良く最適な送信モードを短時間でリコメンドするシステムを提供する。
【解決手段】テスト音波としてインパルス送信部1からインパルスを水中に送信し、受波器2で受信した受信信号からインパルス応答解析部13でインパルス応答を取得し、評価送信モード設定部11で設定した複数の評価送信モードの送信音波それぞれとインパルス応答とをたたみ込み積分計算部14で演算して、評価送信モードそれぞれにおける残響レベル、雑音レベルを求め、エコーレベル計算部16で算出した当該評価送信モード時のエコーレベルとシグナルエクセス計算部17で比較した結果に基づいて、探知距離及び/又は探知領域及び/又は目標存在圏のカバー率を算出することにより最適な送信モードを選択して表示部18に表示する。
(もっと読む)
11 - 20 / 29
[ Back to top ]