
国際特許分類[G01S17/93]の内容
物理学 (1,541,580) | 測定;試験 (294,940) | 無線による方位測定;無線による航行;電波の使用による距離または速度の決定;電波の反射または再輻射を用いる位置測定または存在探知;その他の波を用いる類似の装置 (17,599) | 電波以外の電磁波の反射または再放射を使用する方式 (1,905) | 特定の応用に特に適合したライダー方式 (778) | 衝突防止目的のもの (282)
国際特許分類[G01S17/93]に分類される特許
71 - 80 / 282
三次元測距装置及び移動ロボット
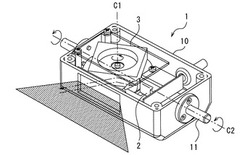
【課題】小型化及び移動ロボットに容易に搭載可能な三次元測距装置を提供する。
【解決手段】三次元測距装置1は、光学部20と信号処理部30を備える。光学部20は、レーザ光を受光及び発光するレーザ受発光部2と、複数のミラー面を有し、レーザ受発光部2から発光するレーザ光の光軸と直交する軸C1を回転軸として回転駆動され、レーザ受発光部2から照射されたレーザ光をミラー面で反射して対象物に照射すると共に、対象物から反射されたレーザ光を反射してレーザ受発光部2に導くポリゴンミラー3と、を有する。信号処理部30は、ポリゴンミラー3の回転制御とレーザ受発光部2からのレーザ光の照射タイミングの制御を行うと共に、レーザ光の受光タイミングから対象物までの距離情報を演算する。光学部20は、回転軸C1に直交する軸を回転軸C2として、外部駆動装置を用いて揺動又は回転動作される。
(もっと読む)
無人搬送車

【課題】光軸調整を容易に行うこと。
【解決手段】複数の反射部17a〜17eを左右方向に段状に配置してなる検査用の反射板17に対して発光させる。そして、反射光を受光することにより、何れの反射部17a〜17eからの反射光であるかを特定する。そして、その結果を、発光部の光軸を調整するための指標となる光軸調整情報として表示部16aに表示させる。表示部16aには、反射した反射部17a〜17eに対応するシンボルHa〜Heが点灯した状態で表示されるので、その表示内容から光軸調整の有無及び調整量を認識できる。
(もっと読む)
障害物検知装置及び障害物検知方法
【課題】電線のような細い障害物であっても、これを適切に検知し、その高さから障害物と移動体の衝突可能性を判定する。
【解決手段】光源11、12はそれぞれ点光源であり、鉛直方向に対して傾いた角度をなす面状に発散する照射光111、121をそれぞれ発する。障害物100が線状であれば、この光って見える箇所は、照射光111のなす面と障害物100との交点、照射光121のなす面と障害物100との交点の2箇所であり、どちらの箇所も点状であるため、これらは輝点として見える。撮像部20は、少なくとも2つの輝点が視野に入り、これらが認識できるように設定される。これらを撮像した2次元画像中における2つの輝点の位置及びこれらの間の間隔から、制御部30は、光源11、12から障害物100の高さを算出し、移動体の最大高さとの関係から障害物100と移動体との衝突可能性を判定する。
(もっと読む)
距離測定装置
【課題】測距対象物の誤認識を防止することができる距離測定装置を提供する。
【解決手段】距離測定装置10は、垂直方向に隣接する計測点までの水平方向の距離差が閾値より小さい場合に、所定の高さを有する測距対象物が存在すると判定する距離測定装置において、任意の測定点に対して距離を測定する測距部1と、測距部1による測定誤差、及び計測点の候補を記憶する記憶部2と、記憶部2により記憶された計測点の候補の中から、記憶部2により記憶された測定誤差による距離差の最大値よりも閾値の方が大きくなるものを計測点として選択決定する選択部3と、を備える。これにより、所望の測距対象物であっても測定誤差のために測距対象として判定されず誤認識してしまうことを防止することが可能になる。
(もっと読む)
移動ロボットの走行領域判別装置及び走行領域判別方法
【課題】移動ロボットの前方領域を走行可能領域及び走行不能領域に正しく区分けし得るうえ、隣接して存在する走行可能領域間の境界部分の段差をも検出して走行の可否を判定し得る走行領域判定装置及び方法を提供する。
【解決手段】移動ロボットRの前方側を走行可能及び走行不能の各領域に分ける処理部30では、外界計測部10のレーザレンジファインダ11を用いて取得した移動ロボットRの前方側プロファイルデータの幾何的特徴量から領域の分割を行い、分割後の領域内の計測点データから勾配や表面粗さなどの幾何的特徴量を評価して、分割した領域を走行可能領域及び走行不能領域に区分けし、加えて、区分けによる走行可能領域G1,G2が隣接している場合、走行可能領域G1,G2間の境界部分Nのデータから、段差Hなどの幾何的特徴量を評価することで、移動ロボットRの境界部分Nでの走行の可否を判定処理する。
(もっと読む)
レーザセンサ及びこれを用いた検出対象判定方法
【課題】レーザセンサを用いて検出対象を検出したときに検出対象が分離して認識されても、これらが一体のものか否かを判定することができるレーザセンサ及びこれを用いた検出対象判定方法を提供する。
【解決手段】検出対象領域6に対してレーザ光を出射するレーザ光出射部2と、検出対象7a、7bからの反射レーザ光を受光して受光情報を出力する受光部3と、受光情報を一時的に記憶する記憶部5と、受光部3及び記憶部5の少なくとも一方から受光情報を受け取り、受光情報が歩行者又は車両のいずれのカテゴリに属するかを判定条件に基づいて判定する判定部4とを備え、判定条件は、受光情報に基づき、対応する検出対象7a、7bの大きさを判定するための大きさ判定基準と、前回の走査周期と今回の走査周期にて得られた受光情報に基づき、同一の検出対象7a、7bの移動距離を判定するための移動距離判定基準を含む。
(もっと読む)
物体認識装置、プログラム
【課題】様々な大きさの物体を精度よく検出する物体認識装置及びプログラムを提供する。
【解決手段】受光信号の受信強度分布をセグメント化し(S110〜S130)、セグメントが過大セグメントである場合に、セグメントのピークの受信強度Apに、物体までの距離に応じて近距離であるほど小さな値となる閾値係数αを乗じることで領域抽出閾値THaを求め(S140〜S200)、その領域抽出閾値THaより信号強度が大きいセグメント内の領域の幅を、セグメントが表す物体の幅に設定する(S210)。これにより閾値係数α(ひいては領域抽出閾値THa)が大きくなる遠距離では、ビームのすそ野部分の影響が極力排除されるため、物体の幅が過大に検出されることがなく、閾値係数αが小さくなる近距離では、すそ野部分の一部を物体が存在する領域として取り込むことになるため、端ビームが無視されても物体の幅が実際より小さく検出されることがない。
(もっと読む)
歩行者安全対応器
【課題】 歩行者と、前方又は後方から歩行者に接近してくる自転車との間の距離を定期的に測定し、自転車と歩行者との距離が予め定めた距離内に入ったとき、歩行者に警報を発して歩行者の傷害事故を防ぐことを可能とする機器を提供するものである。
【解決手段】 本発明の歩行者安全対応器は、赤外線発信器と赤外線受信器により歩行者とこの歩行者に接近してくる自転車との距離を定期的に検知し、その距離dが予め定めた許容距離Dよりも小さな値となったとき、警報機構が作動して音あるいは点滅光を発し、歩行者に注意喚起を行うことを可能としたものである。
(もっと読む)
対象物検出装置および対象物検出方法
【課題】目標とする対象物を精度よく検出するとともに、目標の対象物以外の誤検知を低減することができる対象物検出装置および対象物検出方法を提供する。
【解決手段】仰俯角方向に異なる角度を持った複数のレーザビームを照射しながら回転することによって対象物を検出するレーザレーダが対象物を検出したときの距離の情報に基づいて、人物候補を抽出する人物候補抽出手段と、レーザレーダが対象物を検出したときの高さの情報に基づいて、人物候補の高さを算出し、算出した人物候補の高さと、予め定められる人物の高さとに基づいて、人物候補抽出手段によって抽出された人物候補の中から人物を検出する人物検出手段と、を備える。
(もっと読む)
自律移動装置及びその制御方法
【課題】自己位置推定機能と足元の障害物検出機能とを良好に両立させること。
【解決手段】非接触式の距離センサ17と、移動状況に関する所定の条件に基づいて、足元の障害物検出処理か自己位置推定処理のいずれの処理を実行するか判定する判定部58と、足元の障害物検出処理を実行する場合に、距離センサ17からの測定信号の方向を足元付近に向けて変化させ、自己位置推定処理を実行する場合に、測定信号の方向を遠方の対象物を測定可能となる向きに変化させる反射部19と、距離情報に基づいて足元の障害物を検出する足元障害物検出部57と、距離情報に基づいて自己位置を推定し、移動量から求めた自己位置を、推定した自己位置を用いて補正する自己位置推定部55と、検出した障害物情報と、補正した自己位置とに基づいて、移動装置23の制御を行う走行制御部59と、を備える。
(もっと読む)
71 - 80 / 282
[ Back to top ]