
国際特許分類[G01S17/93]の内容
物理学 (1,541,580) | 測定;試験 (294,940) | 無線による方位測定;無線による航行;電波の使用による距離または速度の決定;電波の反射または再輻射を用いる位置測定または存在探知;その他の波を用いる類似の装置 (17,599) | 電波以外の電磁波の反射または再放射を使用する方式 (1,905) | 特定の応用に特に適合したライダー方式 (778) | 衝突防止目的のもの (282)
国際特許分類[G01S17/93]に分類される特許
51 - 60 / 282
レーザレーダシステム及び移動体
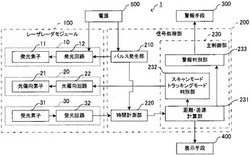
【課題】簡便な処理で、小型なレーザレーダシステムを提供できる。
【解決手段】スキャンモードでは電気光学結晶を用いた光偏向素子21によって広範囲な偏向範囲で走査する。対象物からの反射光を受光素子31によって受光して対象物を捕捉する。時間計測部220によって発光して受光するまでの時間を計測し、この時間に基づいて距離・差速計算部231によって対象物までの距離や差速が計算される。一方、スキャンモードから切り替わったトラッキングモードでは、光偏向素子21によってスキャンモード時の偏向角より微小な偏向角で偏向走査する。対象物からの複数の反射光を受光素子によって受光して対象物を追尾する。
(もっと読む)
移動物予測装置及びプログラム

【課題】移動物の将来の位置分布形状が複雑な形状であっても、計算量の増大を抑制することができるようにする。
【解決手段】領域分割部42によって、走路区分の領域及び静止物の領域に応じて領域を分割した領域分割マップを生成する。分岐ノード生成部44によって、領域境界上に分岐ノードを生成する。移動物生成部46によって、移動物の位置分布を、速度分布と共に記録する。領域分割マップにおいて移動物の位置分布に近傍に分岐ノードが存在する場合、移動物分割部52によって、分岐ノードの分岐すべき方向の数だけ、移動物の位置分布を生成すると共に、分岐ノードが存在する境界で隣接する領域の進入可能性に基づいて、各分岐すべき方向の分岐割合を算出し、移動物の位置分布に対して、分岐割合に応じた重み付けを行うと共に、対応する速度分布の各々を、各分岐すべき方向に応じて変更する。位置更新部48によって、移動物の位置分布を更新する。
(もっと読む)
道路端検出装置、運転者支援装置、および道路端検出方法
【課題】自車両が走行する道路における端部の位置を検出する道路端検出装置において、精度よく道路端を検出できるような技術を提供する。
【解決手段】レーダ装置は、レーダ処理にて、個別領域を自車両の進行方向の左右方向に仮想的に多数並べて形成される検出対象領域の各個別領域に対してそれぞれ光波を照射し、この光波が被測定物に反射されることによる反射光を受光して、対物距離および反射強度をそれぞれ検出する(S110〜S140)。各個別領域のうちの隣接する個別領域で各対物距離の差が基準距離差以上となる第1境界と(S160)、各個別領域のうちの隣接する個別領域で各反射強度の差が基準強度差以上となる第2境界とを検出し(S170)、第1境界の位置または第2境界の位置を道路端として設定する(S180)。
(もっと読む)
障害物検知装置及びプログラム
【課題】障害物を精度良く検知することができる障害物検知装置及びプログラムを提供する。
【解決手段】本発明に係る障害物検知装置は、乗り物から測定対象物までの距離を複数の測定点それぞれについて取得する距離取得手段と、前記距離取得手段が取得した各距離のうち、前記乗り物の形状に対応した位置にある1以上の測定点における距離に基づいて、所定の距離内における障害物の有無を検知する検知手段と、を備える。そして、検知手段は、前記1以上の測定点における距離のうち、前記所定の距離よりも近い距離が所定の数以上あった場合に、前記所定の距離内に前記障害物が存在することを検知する。
(もっと読む)
レーザ距離測定装置
【課題】従来のレーザ距離測定装置では、測定性能や装置構造のさらなる改善が望まれていた。
【解決手段】送信レーザ光LTと目標で反射した受信レーザ光LRの時間的なずれに基づいて目標までの距離を測定するレーザ距離測定装置F1であって、送信レーザ光LTの発光部1と、受信レーザ光LRの受光部2と、垂直軸回りに回転駆動される回転体3を備えると共に、回転体3に、回転しながら発光部1からの送信レーザ光LTを外部の所定角度範囲に走査する送信光学系4と、回転しながら外部の所定角度範囲からの受信レーザ光LRを受光部2に導く受信光学系5を設けたことにより、一つの回転体3に、送信光学系4及び受信光学系5をコンパクトに搭載すると共に、全方位分の送信レーザ光LTを有効に使用するようにして、走査性能や測定性能のさらなる向上、及び装置構造のさらなる小型軽量化を実現した。
(もっと読む)
距離測定装置、距離測定方法、および距離測定プログラム
【課題】物体までの距離を測定する距離測定装置において、簡素な構成で距離と輝度とを検出できる技術を提供する。
【解決手段】レーダ装置は、レーザ光を射出する発光部と、発光部からのレーザ光が物体に反射されることにより得られる反射光を受光し、この光量に応じた出力をする受光部と、を備えている。そして、レーダ装置は、レーダ処理にて、受光部による出力に基づいてレーザ光を反射した物体までの距離を演算し(S220)、また、受光部による出力に基づいて輝度を演算する(S230)。このレーダ装置によれば、物体までの距離だけでなく、受光部が受光することができる領域における輝度についても、レーダ装置の構成(ハードウェア)を利用して検出することができる。よって、簡素な構成で距離と輝度とを検出することができる。
(もっと読む)
移動ロボットの走行領域判別装置及び走行領域判別方法
【課題】移動ロボットの前方領域を走行可能領域及び走行不能領域に正しく区分けし得るうえ、計測点データの抜けが生じても走行可能領域を正しく評価し得る走行領域判定装置及び方法を提供する。
【解決手段】移動ロボットRの前方側を走行可能及び走行不能の各領域に分ける処理部30では、外界計測部10のレーザレンジファインダ11を用いて取得した移動ロボットRの前方側プロファイルデータの幾何的特徴量からマルコフ連鎖モンテカルロ法による領域の分割を行い、プロファイルデータを構成する計測点データ間における移動ロボットの進行するx方向と直交するy方向の間隔が閾値を超える部位が存在する場合には、閾値を超える部位を境にして領域を分割し、分割後の領域内の計測点データから勾配や表面粗さなどの幾何的特徴量を評価して、分割した領域を走行可能領域及び走行不能領域に区分けする。
(もっと読む)
走行制御装置
【課題】停止線などの道路上を横切る白線に対しても、サンプリング周期を短くすることなく検出可能となり、適切なタイミングで走行制御ができる。
【解決手段】車両に搭載された第1のビーム発生手段から光ビームを発生させ、この光ビームを、車両前方に対して第1の角度αだけ鉛直下方に傾かせ、かつ車幅方向に対して第2の角度θだけ車両前後方向に傾かせて固定し、車線幅の中央を横切るように走査し、車両前方の道路上で反射された光ビームの反射光を受光し、車両の速度を検出し、車両の速度に基づいて反射光の位置を算出し、この反射光の位置に基づいて、道路上の車幅方向に伸びる白線を検出し、この白線と車両の速度に基づいて車両の走行制御を行う。第2の角度θが走行速度及び光ビームの走査周期により定められる。
(もっと読む)
上方障害物検知装置、衝突防止装置および上方障害物検知方法
【課題】道路の状態や車両の姿勢の変化にかかわらず、路面の上方に存在する物標から路面までの距離を求めることができる上方障害物検知装置、衝突防止装置および上方障害物検知方法を提供する。
【解決手段】頭上物標検知手段11,12,13によりレーザ光が出射されてから戻るまでの第1の時間と、当該レーザ光が頭上物標検知手段11から出射された際の出射角である仰角を検知し、頭上物標算出手段15は、第1の時間および仰角に基づいて頭上物標距離および頭上物標高さを算出する。その一方で、路面検知手段11,12,14によりレーザ光が路面で反射して路面検知手段に戻るまでの第2の時間と、当該レーザ光が出射された際の出射角である俯角を検知し、路面高さ算出手段15は、第2の時間および俯角に基づいて路面高さを算出する。道路高さ幅算出手段15は、頭上物標高さ、および、路面高さを足し合わせて道路高さ幅を算出する。
(もっと読む)
車両の周辺監視装置
【課題】車両の周辺の物体を検出するレーダと、車両の周辺の画像を撮像するカメラと、レーダが検出した物体の位置に対応する、カメラが撮像した対応画像上の所定領域を特定して所定領域内の物体を特定する手段とを備える、車両の周辺監視装置を提供する。
【解決手段】周辺監視装置は、特定された対応画像上の所定領域の移動量の時間変化と、カメラが撮像した画像上での所定物体の移動量の時間変化との位相ずれ量を算出する手段と、位相ずれ量がゼロになるように、レーダまたはカメラの出力信号の位相補正をおこなう位相補正手段と、対応画像上の所定物体に対する所定領域の位置ずれ方向が常に同一方向である場合にレーダまたはカメラの光軸ずれがあると判断し、所定領域の位置ずれ方向が所定物体の移動方向と逆方向である場合にレーダとカメラの同期ずれがあると判断する判断手段と、を有する。
(もっと読む)
51 - 60 / 282
[ Back to top ]