
国際特許分類[G01S17/93]の内容
物理学 (1,541,580) | 測定;試験 (294,940) | 無線による方位測定;無線による航行;電波の使用による距離または速度の決定;電波の反射または再輻射を用いる位置測定または存在探知;その他の波を用いる類似の装置 (17,599) | 電波以外の電磁波の反射または再放射を使用する方式 (1,905) | 特定の応用に特に適合したライダー方式 (778) | 衝突防止目的のもの (282)
国際特許分類[G01S17/93]に分類される特許
11 - 20 / 282
対象物との相対位置計測方法と装置
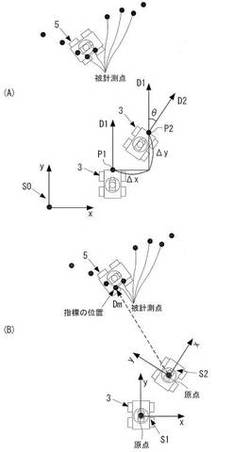
【課題】向きの変更と移動の少なくとも一方を行う動作体から、対象物との相対位置を高精度に計測できる手段を提供する。
【解決手段】動作体3に設置したレーザ距離センサにより、各被計測点の位置を動作体座標系で表わされた座標値を取得する。動作体3に設置した撮像装置により、対象物5が含まれる領域を撮像して画像を生成する。画像において、対象物5に取り付けられた指標の位置を特定し、この位置に基づいて、撮像時において対象物5の方向を特定する。距離計測時の動作体3の向きと位置に対する撮像時の動作体3の相対的な向きθと位置Δx,Δyに従って、各被計測点の座標値を、距離計測時の動作体座標系の座標値から撮像時の動作体座標系の座標値に変換する。画像内の指標の位置に対応する、変換後の座標値を特定し、この座標値に基づいて、撮像時における動作体3から対象物5までの距離を求める。
(もっと読む)
信号処理装置

【課題】複数のAD変換器を用いて同一のアナログ信号をAD変換する信号処理装置において、個々のAD変換器の特性のばらつきによって生じる同一のアナログ信号のAD変換精度の低下を抑制する。
【解決手段】クロック生成部58はπ[rad]位相の異なる二つのクロックを生成し、対象信号供給部52は受信信号RSまたは0VのいずれかをAD変換部68の二つのAD変換器72、74に供給する。被補正データ生成部86は、AD変換部68が受信信号RSをAD変換した結果に基づき、読出データRDを生成する。オフセットデータ生成部76は、AD変換部68が基準電圧をAD変換した結果に基づき、AD変換器72、74毎の測定誤差を表すオフセットデータAZ1、AZ2を生成する。補正部100は、読出データRDからオフセットデータAZ1、AZ2分を除去する補正処理を実行し、サンプリングデータSDを生成する。
(もっと読む)
距離測定装置
【課題】車両と測定対象物との間の距離が変化する場合であっても、測定対象物までの距離を高精度に測定することが可能な距離測定装置を提供する。
【解決手段】投光部11より、水平方向に広がる発光領域を有すると共に、上端部、及び下端部が水平となる直線状の端部を有する時間変調した領域光を投光する。そして、測定対象物にて反射した領域光をカメラ12にて撮像し、撮像した画像から上端エッジ、及び下端エッジを抽出し、更に、上端エッジ、及び下端エッジに基づき、三角測量の原理により第1測定距離、及び第2測定距離を求める。そして、測定対象物が車両から遠ざかる場合には、第2測定距離を選択し、測定対象物が車両に近づく場合には第1測定距離を選択する。その結果、測定対象物との間の距離が変化する場合であっても、距離の測定精度を向上させることが可能となる。
(もっと読む)
物標検出装置,壁判定方法
【課題】車両の周囲に存在する物体を検出する物標検出装置において、壁状の静止物体が移動物体として誤認識される頻度を低減する。
【解決手段】探査周期毎に測距データを取得し(S100)、取得した測距データをクラスタリング(S110)し、自車両が停止中ではない場合(S120-N)、クラスタが単一の反射点からなる場合、即ち、クラスタが示す物標が壁であるか否かを判定できない場合(S140-N)、または、クラスタが複数の反射点からなり(S140-Y)、かつ同一クラスタに属する二つの反射点間を結ぶ直線の傾き(基準方向と交差する角度)Yが許容壁範囲内(X−ΔX≦Y≦X+ΔX)にある場合、即ち、クラスタが示す物標が壁であると判定された場合(S150,S160-Y)、そのクラスタを、トラッキング処理や移動/停止判定の処理対象から除去する(S170)。
(もっと読む)
データ解析装置、レーダ装置、およびデータ解析方法
【課題】サンプリング値に対するデータ解析を行うデータ解析装置において、サンプリング値を時系列に従って並べた時系列データにおける複数のピーク値の位置を正確に推定できるようにする。
【解決手段】レーダ装置においては、複数のサンプリング値を時系列に従って並べた時系列データにおいてサンプリング値の極大値および極小値を検出し(S10)、極小値として得られたサンプリング値以上の値を基準値として、この基準値よりも大きな値を有するサンプリング値のうちの時系列データにおいて互いに隣接するものをそれぞれグループとし、これらのグループ毎に入力信号が最大となるピーク位置を推定する(S20)。このようなレーダ装置によれば、極小値を変更することなく基準値を設定し、ピーク位置を推定することができるので、各ピーク位置を正確に推定することができる。従って、精度よく物標までの距離を検出することができる。
(もっと読む)
車載レーザレーダ装置
【課題】ナンバープレートと車両本体との間にレーザレーダ装置を配置した場合に生じる反射光の影響を抑制可能な車載レーザレーダ装置を提供する。
【解決手段】レーザレーダ装置30は、ナンバープレート12とバンパー14との間にねじ止めされ、照射部42から照射されるレーザ光が筐体外に出射される位置及び受光部44に導かれる反射光を筐体内に取り込む位置が、ナンバープレート12の車幅方向の端部より中央側に奥まった位置に配されている。ここで特に、照射部42から照射されるレーザ光のうちナンバープレート12及びバンパー14の少なくとも一方によって反射されるレーザ光が受光部44にて受光されないように、照射部42による照射範囲AI及び受光部44による受光範囲ARが定められている。
(もっと読む)
距離,速度測定装置
【課題】測定周期毎に、送信波を反射した物標との距離(ひいては速度)を可能な限り精度良く求めることができる距離,速度測定装置を提供する。
【解決手段】受光チャンネルCHi(i=1〜4)のそれぞれについて一発測距回路321と積分測距回路322とを並行して動作させ、受光チャンネルCHiから得られる受信信号Riが上閾値より大となる一発測距領域では一発測距回路321による第1測距値D1を、受信信号Riが下閾値以下となる積分測距領域では積分測距回路322による第2測距値D2を、受信信号Riが下閾値より大且つ上閾値以下となる中間領域では、両測距値D1,D2の加重平均値を距離データDとして生成する。
(もっと読む)
車両周辺監視装置
【課題】車両周辺の監視領域に存在する対象物を少なくともレーダ装置により検知する場合に、監視領域に存在する個々の対象物の検知の信頼性を高めることができる車両周辺監視装置を提供する。
【解決手段】レーダ装置2よりレーダ電波の走査を行なう車両周辺の監視領域を車載カメラ3により撮像し、撮像画像の色情報又は輝度情報に基づいて、監視領域におけるレーダ電波の反射率の分布を反射率推定手段5により推定する。レーダ電波の反射波に受信強度に対する閾値(監視領域の各局所に対応する閾値)を、受信強度閾値設定手段6により、推定した反射率の分布に応じて設定する。対象物認識手段7は、少なくとも前記反射波の受信強度と前記設定された閾値との比較に基づいて前記監視領域に存在する対象物を検知する。
(もっと読む)
レーザレーダシステム,及び取付方法
【課題】自動車に取り付けられるレーザレーダにおいて、モレ光の影響でゴーストが物体として検出されることの低減。
【解決手段】レーザレーダシステム1は、レーザレーダ10と、処理済部材80とを備える。レーザレーダ10は、レンズを含む光学素子を介して、規定角度範囲LA,RAに渡ってレーザ光を照射し、反射されたレーザ光を受光することで物体を検知する。処理済部材80は、レーザレーダ10が取り付けられる自動車における外表面のうち、モレ範囲LE,REと重複する外表面の範囲に反射率を低減させる反射率低減処理が施された部材である。モレ範囲LE,REとは、規定角度範囲LA,RAへのレーザ光の照射に伴って、当該規定角度範囲LA,RAに照射されるレーザ光の強度よりも強度が小さいレーザ光が照射される範囲であり、規定角度範囲LA,RAに隣接する範囲である。
(もっと読む)
車両用制御装置
【課題】基準軸のずれが発生したことを精度よく検出することが可能な車両用制御装置を提供する。
【解決手段】運転者支援システムにおけるヘッド部では、車両に対する物標探査器7の姿勢変化量(傾斜量,加速度)を検知する姿勢検知器8が、物標探査器7とともに筐体30の内部に固定されており、制御部20が、姿勢検知器8にて検知した姿勢変化量が予め設定された閾値変化量(閾値傾斜量,第1の加速度)を上回る場合に、物標探査器7の基準軸のずれが発生したことを検出する。つまり、実際に物標探査器7が車両に対して所定量ずれている場合に、物標探査器7の基準軸のずれが発生しているものとみなすことにより、基準軸のずれが発生したことを精度よく検出することが可能となる。
(もっと読む)
11 - 20 / 282
[ Back to top ]