
国際特許分類[G01S17/93]の内容
物理学 (1,541,580) | 測定;試験 (294,940) | 無線による方位測定;無線による航行;電波の使用による距離または速度の決定;電波の反射または再輻射を用いる位置測定または存在探知;その他の波を用いる類似の装置 (17,599) | 電波以外の電磁波の反射または再放射を使用する方式 (1,905) | 特定の応用に特に適合したライダー方式 (778) | 衝突防止目的のもの (282)
国際特許分類[G01S17/93]に分類される特許
81 - 90 / 282
ビーム照射装置
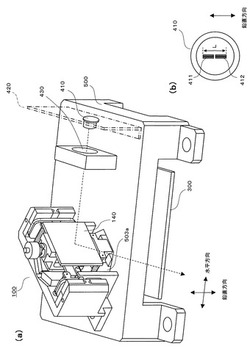
【課題】シリンドリカルレンズ等のビーム整形用レンズを用いることなく、所望の形状のビームを目標領域に照射可能なビーム照射装置を提供する。
【解決手段】 レーザ光を出射するレーザ光源410と、レーザ光源410から出射されたレーザ光が入射される収束レンズ430と、収束レンズ430を透過したレーザ光を目標領域において走査させるためのミラーアクチュエータ100を備える。レーザ光源100は、レーザチップのpn接合面が鉛直方向に平行となるように配される。レーザ光源100の発光部の鉛直方向に平行な方向の長さによって、目標領域における前記レーザ光の鉛直方向の長さが設定される。
(もっと読む)
カラー式対象物表示システム

【課題】周囲の対象物をカラー画像として表示可能であり、しかも対象物までの距離が所定の距離より近いことを瞬時に認識できるように表示できるカラー式対象物表示システムを得る。
【解決手段】R画素、G画素、及び、B画素を有するカラー式CMOSセンサ19と、CMOSセンサが受光した赤外光に基づいて対象物までの距離が設定距離範囲にあるかを判定する距離判定手段22と、R画素、G画素、及び、B画素の電気信号に基づくカラー画像と、距離判定手段の判定結果に基づく判定結果画像とを交互に生成する画像処理手段23と、時間残像現象が生じ得る時間間隔でカラー画像と判定結果画像を交互に表示するモニタ24と、を備える。
(もっと読む)
周辺物体検出装置、周辺物体検出方法
【課題】より正確に周辺物体を検出することができる周辺物体検出装置、周辺物体検出方法を提供する。
【解決手段】周辺物体検出装置1は、所定周期で強度変調された照射光を対象空間に照射する照射手段2と、対象空間において発生する反射光を所定周期内において複数設定された受光期間において受光し、受光された反射光の受光光量に応じた電荷を生成する光電変換手段5と、電荷に基づいて所定周期内の複数の受光期間毎の受光光量を検出する受光光量検出手段と、複数の受光期間毎の受光光量と第一換算式により照射光と反射光の位相差を算出する位相差算出手段と、第二換算式により反射光の輝度を算出する輝度算出手段と、位相差と第三換算式に基づいて周辺物体との相対距離を算出する相対距離算出手段と、輝度が所定閾値以上であって相対距離の一定期間内の変動距離が一定変動距離以下である場合に、周辺物体が虚像であると判定する虚像判定手段とを含む。
(もっと読む)
車両用物体検知装置および車両用走行制御装置
【課題】 霧、雪、雨等の悪環境下でも先行車等の目標物を的確に検知できるようにする。
【解決手段】 統合手段M6は、物体検知手段M3が検知した物体のうち、送信から受信までの時間が悪環境判定時間以上の受信波により検知された物体を各物体間の距離に基づいて目標物として統合し、不検知度判定手段M7は統合手段M6により統合された目標物の不検知度を判定し、システムフェイル判定手段M5は悪環境判定手段M4により霧、雪、雨等の悪環境と判定された場合でも、不検知度判定手段M7で判定した目標物の不検知度が判定閾値以下の場合には物体検知手段M3の出力を継続するので、悪環境下でも物体検知手段M3の出力を一律に中止することなく、ACCシステムM9の作動を継続してその機能を最大限に活かすことができる。
(もっと読む)
車両検出装置
【課題】本発明は、画像から車両の情報を高精度に検出する車両検出装置を提供することを課題とする。
【解決手段】撮像手段4で撮像した画像から車両の情報を検出する車両検出装置1であって、車両の面の候補を推定する面候補推定手段11と、車両を撮像した画像から所定の特徴量を有する複数の特徴点を抽出する特徴点抽出手段12と、抽出した特徴点の3次元位置を推定する3次元位置推定手段13と、異なる時刻で撮像した各画像からそれぞれ推定された面候補の組み合わせ毎に、面候補間で複数の特徴点について特徴量の差が小さくなる特徴点の対応関係を探索し、当該探索された対応関係の複数の特徴点間において3次元位置を並進移動及び回転変換した上で位置誤差を求め、当該位置誤差が最少となる組み合わせの面候補を抽出し、当該抽出した組み合わせの面候補に基づいて車両の面を検出する車両情報検出手段14とを備えることを特徴とする。
(もっと読む)
測距方法及び車載測距装置
【課題】床面に近い位置に置かれた障害物を精度良く検知できる測距方法を提供する。
【解決手段】発光部から出力された測定光を所定周期で繰り返し走査して対象物からの反射光を受光部に導き、測定光と反射光の検出時間差に基づいて対象物までの距離を算出する測距装置を車両に取り付けて、走査面が測定対象平面と交差するように測定光を走査して、測定対象平面または対象物までの距離を算出し、所定の走査角度で算出された距離に基づいて測定対象平面に平行な仮想平面を生成し、各距離を仮想平面からの鉛直距離に換算し、換算した鉛直距離と当該鉛直距離に対応する測定対象平面上の測定光の走査位置との相関を表す近似線を算出し、換算した鉛直距離が当該近似線から求まる鉛直距離より所定の閾値以上短い値を示す走査位置に対象物が存在すると検知する各ステップを所定の走査周期毎に繰り返す。
(もっと読む)
車両用物体検知装置
【課題】高反射物体と低反射物体とを精度良く識別して歩行者などの低反射物体の検出が遅れることのないようにした車両用物体検知装置を提供する。
【解決手段】電磁波で水平方向をスキャンして反射レベルが検知しきい値を超える反射波に基づいて物体を検出すると共に(S10)、レイヤで反射レベルが検知しきい値より高く設定された高反射物検知しきい値を超える高反射波があるか判定し(S14)、肯定されるとき、他のレイヤの検知方向に低反射波があるか判定し(S16)、肯定されるとき、低反射波に相当する低反射物体を高反射波に相当する高反射物体とは別の物体と識別する一方(S18)、否定されるとき、検知しきい値を上げると共に、電磁波のスキャン方向を水平方向から垂直方向に変更させ、高反射物体が検出された場所を除く、その近傍を再スキャンさせ、高反射物体とは別の物体と識別する(S20)。
(もっと読む)
車両用物体検知装置
【課題】物体が横方向から自車進行方向に進入するような場合、物体の移動速度を精度良く算出するようにした車両用物体検知装置を提供する。
【解決手段】自車進行方向にレーザ光を発射すると共に、受信された反射波から検知エリア内の反射物の検出点を抽出し、複数の検出点が抽出されるとき、複数の検出点をクラスタリングして反射物を1個の物体として検出し(S10からS12)、検出された物体が自車進行方向に横方向から進入するとき、検知エリア内に完全に入っているか否か判定し(S16)、検出された物体が検知エリア内に完全には入っていないと判定されるとき、複数の検出点のうちの物体の移動方向において先端側または後端側の検出点を選択してそれに基づいて物体の移動速度を算出する一方(S18)、完全に入っていると判定されるとき、複数の検出点のうちの中央の検出点を選択して移動速度を算出する(S20)。
(もっと読む)
距離画像センサシステムおよび距離画像生成方法
【課題】簡易な構成でかつ正確に距離画像を生成する距離画像センサシステムおよび距離画像生成方法を提供する。
【解決手段】被写体までの距離を画素ごとに測定した距離画像を生成する距離画像センサシステムである。距離画像センサシステムは、複数の光源、発光制御手段、距離画像生成手段、および距離画像選択手段を備える。複数の光源は、それぞれ離間して配置されて発光する。発光制御手段は、複数の光源を順に切換えて発光させる。距離画像生成手段は、複数の光源それぞれの発光に対応して画像の撮像を行い、各画素が撮像された被写体までの距離に応じた画素値を有する距離画像を、複数の光源それぞれに対応して複数生成する。距離画像選択手段は、距離画像センサシステム複数の距離画像のうち、画像の撮像において受光量が最も多い画像を用いて生成された距離画像を選択する。
(もっと読む)
物体検出装置
【課題】物体の向きに適応した物体の輪郭検出を行うことにより物体の検出精度を高められる物体検出装置を提供すること。
【解決手段】物体の検出を行う物体検出装置であって、LIDAR2により物体の検出点pを検出し、物体の向きをカメラ3によって検出し、物体の向きに応じて輪郭検出用のテンプレートを選択し、そのテンプレートをLIDAR2により検出された検出点pの点列Pに当てはめて物体の輪郭を検出する。これにより、物体の向きに適応した形状のテンプレートを用いて物体の輪郭を検出することができるため、物体の輪郭を適切に検出して物体の検出精度を高めることができる。
(もっと読む)
81 - 90 / 282
[ Back to top ]