
国際特許分類[G05D1/10]の内容
物理学 (1,541,580) | 制御;調整 (21,505) | 非電気的変量の制御または調整系 (4,282) | 陸用,水用,空中用,宇宙用運行体の位置,進路,高度または姿勢の制御,例.自動操縦 (1,941) | 三次元における位置または進路の同時制御 (20)
国際特許分類[G05D1/10]に分類される特許
1 - 10 / 20
飛行経路特定方法およびプログラム
【課題】複数の航空機が衝突を回避しつつ、迅速かつ効率的にそれぞれの目標位置に移動する。
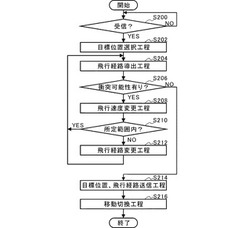
【解決手段】飛行経路特定方法では、複数の航空機のうち任意の1の航空機が、他の航空機の目標位置と飛行経路とを受信し(S200)、他の航空機の目標位置を除く複数の目標位置から、到達までの時間が最短となる、または、到達に要するエネルギーが最小となる目標位置を選択し(S202)、自機の飛行状態に基づいて現地点から目標位置までの飛行経路を導出し(S204)、導出された飛行経路と他の航空機の飛行経路とを比較して、自機と他の航空機とが衝突するか否か判定し(S206)、衝突すると判定した場合、衝突しない飛行経路となるまで、飛行速度または飛行経路自体を変更する。
(もっと読む)
自律移動ロボットの動作計画方法、自律移動ロボットの動作計画方法を利用した自律移動ロボットの制御方法、自律移動ロボットの動作計画装置、自律移動ロボットの動作制御装置、自律移動ロボットの動作計画プログラム、自律移動ロボットの制御プログラム

【課題】流速および流れの向きが不確定な環境中において、自律移動ロボットが目標位置に十分な精度で到達することを可能ならしめる動作計画を行う。
【解決手段】部分観測マルコフ決定過程(POMDP)のうち、行動主体の状態についての確率分布が状態のエントロピーにて表現可能であるという仮定に基づくAugmented MDPにおける動的計画法を応用する。本発明では、自律移動ロボットの状態が、デカルト座標、方位角、当該デカルト座標の確率分布についてのエントロピー、当該方位角の確率分布についてのエントロピーを含んで表現されており、デカルト座標と方位角からなる位置座標を確率的に計算する。
(もっと読む)
軌道追従制御装置、方法及びプログラム
【課題】制御対象物の状態変数の一階微分(例えば速度DX(t)/Dt)を計測及びフィードバックすることなく、スライディング制御を実現する。
【解決手段】スライディング制御の式の中で登場する定数λの値をfとする。また、定数λの値を、制御対象物の状態変数X(t)(例えば位置)、制御対象物の目標とする状態Xd(t)(例えば目標位置)を用いて制御対象物の目標とする状態の一階微分(例えば目標速度DXd(t)/Dt)に応じて適宜修正する。これにより、スライティング制御の式の中で登場する制御対象物の状態変数の一階微分(例えば速度DX(t)/Dt)の項を消すことができ、制御対象物の状態変数の一階微分(例えば速度DX(t)/Dt)を計測及びフィードバックすることなく、スライディング制御を実現することができる。
(もっと読む)
自律移動装置
【課題】構造体により限定された作業空間内で移動する自律移動装置の移動可能な領域が拡大されて作業領域が拡大され、隣接した作業領域へ作業装置を容易に移動させることができる自律移動装置を提供する。
【解決手段】本発明による自律移動装置は、メインフレーム、メインフレームの上部に結合される複数の上部ウインチ及びメインフレームの下部に結合される複数の下部ウインチを含み、作業空間内に位置する移動プラットフォームと、一端部は構造体の下側にそれぞれ結合され、他端部は上部ウインチにそれぞれ連結されて長さが調整可能な複数の第1ワイヤと、一端部は構造体の上側にそれぞれ結合され、他端部は下部ウインチにそれぞれ連結されて長さが調整可能な複数の第2ワイヤと、を含むことを特徴とする  (もっと読む)
(もっと読む)
移動体の三次元群制御方法
【課題】本発明が解決しようとする課題は、三次元移動体の群制御に関するものであって、従来のような厄介な制御ではなく、しかも群が集合状態を維持しながら同一方向へ移動する機能、作業対象の周囲を定点旋回移動する機能を安定して備えた群制御手法を提示することである。
【解決手段】本発明に係る移動体の三次元群制御方法は、対象個体周辺の外側から内側に向かって接近領域,平行領域,そして反発領域の順に球状若しくは楕円球状の三層構造からなる相互作用領域を設定し、周辺個体がどの領域に存在するかに応じて接近ルール、平行ルールそして反発ルールからなる行動モデルをアルゴリズムとして適用するものである。
(もっと読む)
水中移動体の制御装置
【課題】水中移動体の位置および姿勢を精度良く制御する水中移動体の制御装置を提供することにある。
【解決手段】指令速度−指令推力変換手段24は、コントローラ13から入力した速度指令値を指令推力へと変換する。PID制御器27は、変換された指令推力と、3軸周りの角速度と3軸方向の加速度から、XYZ方向の推力制御量を算出する。スラスタ推力配分手段28は、XYZ方向の推力制御量を各スラスタが発生するスラスタ推力に変換する。スラスタ推力−モータ電圧変換手段29は、スラスタ推力を各スラスタの駆動モータの指令電圧へと変換し、スラスタ21,22,23に供給し、水中検査装置9を動作させる。初期キャリブレーション手段30は、指令値−指令推力変換手段24とスラスタ推力−モータ電圧変換手段29で用いる変換ゲインを予め同定し、同定した変換ゲインを各手段24,29に設定する。
(もっと読む)
自律移動ロボットの動作計画装置、方法、プログラム及び記録媒体並びに自律移動ロボットの動作制御装置及び方法
【課題】より安全で、より動作計画が破綻しづらい自律移動ロボットの動作計画を行う。
【解決手段】安全性を高めるために想定される流速よりも速い流速の下で、第一状態遷移確率を計算する。第一状態遷移確率及び所定の第一報酬を用いて、マルコフ決定過程における動的計画法に基づき、状態価値関数Vπ(s)を求める。想定される流速の下で、第二状態遷移確率を計算する。第二報酬を、遷移先の状態についての第一指標に応じて定める。第二状態遷移確率及び第二報酬を用いて、マルコフ決定過程における動的計画法に基づき、行動価値関数Qπ(s,a)及び状態価値関数Vπ(s)を求める。行動価値関数Qπ(s,a)及び状態価値関数Vπ(s)を最大にする行動aを選択する。
(もっと読む)
衝突防止操縦を決定する方法
衝突防止操縦を決定する方法(図4)は第1のオブジェクト100と第2のオブジェクト102(図1)の初期状態データ402(図4)を得ることを含んでいる。制約の第1のセットを満たす複数の予備操縦404は初期情愛データを使用して発生される。最良の予備操縦406は複数の予備操縦から選択され、最良の予備操縦は最終操縦を行うための目的関数により最適化される(410)。最適化は制約の与えられた第2のセットにしたがう(408)。 (もっと読む)
自律移動ロボットの動作計画方法、自律移動ロボットの動作計画方法を利用した自律移動ロボットの制御方法、自律移動ロボットの動作計画装置、自律移動ロボットの動作計画プログラム及びその記録媒体、自律移動ロボットの制御プログラム
【課題】自律移動ロボットの加速度制限値と3次元障害物への対応とを考慮した自律移動ロボットの動作計画技術を提供する。
【解決手段】目標速度計算部102が、自律移動ロボットの加速度制限値を考慮した式により、目標速度を計算する。変位量計算部104が、その目標速度と、想定される風速(103)から、位置と方位角と旋回速度のそれぞれの変位量を計算する。状態遷移確率計算部105が、その変位量から状態遷移確率を計算する。一方、傾斜角差計算部107が、地形モデル(106)を参照して、遷移前の状態とある行動を取った際の遷移先の状態の傾斜角差を計算する。登坂角度計算部108が、自律移動ロボットの登坂角度変化最大量を計算する。報酬決定部109が、上記傾斜角と上記登坂角度変化最大量を比較し、上記傾斜角の方が大きければ、低い報酬を与える。
(もっと読む)
無人ヘリコプタおよび外部環境推定装置
【課題】第1には、外部環境を推定する。第2には、安定した飛行を実現する。
【解決手段】無人ヘリコプタ1が風wを浴びると、無人ヘリコプタ1は、位置および速度を目標位置および目標速度に保つために、姿勢を変更する(点線r)。このように風wの影響を受けると、無人ヘリコプタ1は、姿勢を自動的に変更するため、無人ヘリコプタ1の理想的な目標姿勢(点線t)と実際の姿勢との間には偏差αが生じることとなる。本発明では、その偏差αから風の有無や風量等の外部環境の状況を推定する。この推定値に基づいて無人ヘリコプタ1の飛行速度等を設定することより、安定した姿勢での飛行を実現することができる。
(もっと読む)
1 - 10 / 20
[ Back to top ]