
国際特許分類[G06T7/20]の内容
物理学 (1,541,580) | 計算;計数 (381,677) | イメージデータ処理または発生一般 (58,387) | イメージ分析,例.ビットマップから非ビットマップへ (10,245) | 動きの分析 (2,724)
国際特許分類[G06T7/20]に分類される特許
101 - 110 / 2,724
情報処理装置、物体追跡方法および情報処理プログラム
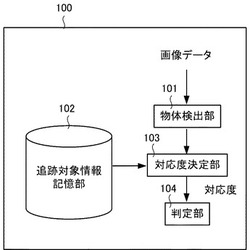
【課題】誤った追跡対象の早期削除と、正しい追跡対象が一時的に隠れている状況での追跡維持とを両立させ、追跡対象数が変化する場合にも正しく物体追跡を行なうこと。
【解決手段】画像中の物体を検出する物体検出手段と、追跡対象とすべき追跡対象物体の情報を記憶する記憶手段と、物体検出手段が検出した検出物体と追跡対象物体との対応度を決定する対応度決定手段と、対応度を用いることにより、検出物体が追跡対象物体であるのか、追跡対象物体が画像中において一時的に隠れているのか、または、追跡対象物体の情報を記憶手段から削除すべきなのかを判定する判定手段と、を備えた情報処理装置。
(もっと読む)
歩容解析方法、歩容解析装置及びそのプログラム

【課題】ユーザの歩容を精度良く解析できるようにすること。
【解決手段】歩容解析装置1は、ユーザの歩行時に計測された第1加速度データを時系列で受信する加速度情報受信部101と、前記第1加速度データに対して平滑化処理を行う平滑化処理部102と、前記平滑化処理後の第2加速度データ及び前記第1加速度データのそれぞれに対して周波数解析を行い、前記第2加速度データのパワースペクトラムからピーク周波数の候補を抽出し、前記第1加速度データのパワースペクトラムから前記候補の近傍のピーク周波数を検出し、当該ピーク周波数により前記ユーザの歩行周期Tを算出する歩行周期算出部103と、前記第1加速度データの自己相関関数を算出する自己相関算出部104と、前記歩行周期Tに基づいて前記自己相関関数におけるピークを検出するピーク検出部105とを備える。
(もっと読む)
画像処理装置、画像処理方法及びプログラム
【課題】画像認識を利用して行われる画像データの記録の制御をより適切なものとすること。
【解決手段】画像処理装置1は、画像データの動きベクトルを基に画像処理装置1の静止を判定する静止判定部71、逐次入力される画像データの変化を検出する画像変化検出部72を備えている。そして、静止判定部71によって、画像処理装置1が静止していると判定された場合に、画像変化検出部72が画像データの変化を検出し、画像データが変化した場合に、撮像画像のデータを記憶する。そのため、画像処理装置が静止しており、自動記録機能による撮影のタイミングを判定するのに適している状態で、当該自動記録機能による画像データの記録のための画像認識を行うことができる。したがって、画像データの変化をより適確に判定することができ、画像認識を利用して行われる画像データの記録の制御をより適切なものとできる。
(もっと読む)
画像処理ユニット、および画像処理プログラム
【課題】生成する背景差分画像の精度の低下を抑えるとともに、装置本体にかかる処理負荷の増大も抑え、装置本体のコストダウンを図った画像処理ユニットを提供する。
【解決手段】メモリ4aは、代表画素毎に、その代表画素の特徴と、その代表画素の画素値の発生頻度をモデル化した背景モデルと、を関連付けて記憶する。画像処理部4は、画像入力部3に入力されたフレーム画像の画素毎に、その画素の特徴に対応する代表画素の背景モデルを探索する。画像処理部4は、この探索で得た背景モデルに基づき、背景が撮像されている背景画素、または背景でない物体が撮像されている前景画素のいずれであるかを判定する。画像処理部4は、画像入力部3に入力されたフレーム画像のいずれかの画素において、その画素が背景画素、または前景画素のいずれであるかの判定に用いた背景モデルを、この背景モデルを用いた画素の画素値に基づいて更新する。
(もっと読む)
画像処理装置およびこれを備えた原稿読取システム
【課題】画像処理装置において、ユーザが原稿を手で押さえて読み取り時の紙面を正常に保持しながら、特定の操作を必要とすることなく、所望のタイミングで撮影画像を記録可能とする。
【解決手段】撮影画像から原稿の輪郭成分を抽出するページ輪郭検出部32と、撮影画像において特定領域A1、A2を設定する特定領域設定部33と、特定領域においてユーザの手指を認識する指認識部31と、指認識部にて認識された手指の動きを検出する動き検出部35と、動き検出部の検出結果に基づき、ユーザからの動作指令が与えられたと判定した場合に、撮影画像を記録する画像記録部36とを備え構成とする。
(もっと読む)
画像処理装置、画像処理方法及び画像処理プログラム
【課題】多様なパターンのジェスチャを認識することを課題とする。
【解決手段】画像処理装置10は、原画像からジェスチャを認識する対象を特徴付ける色を有する画素を抽出する。さらに、画像処理装置10は、原画像から先の色を有する画素が抽出されることによって得られた色画像のフレーム間で差分を抽出する。さらに、画像処理装置10は、色画像のフレーム間で差分が抽出された領域の大きさに基づいて、第1の方式および第2の方式のうち一方の方式を選択する。
(もっと読む)
動き画像領域判定装置またはその方法
【課題】 簡易な構成で矩形動き画像領域を判定する。
【解決手段】 動き単位ブロック判断手段5は、各単位ブロックについて、比較対象のフレームの同じ位置の単位ブロックの代表値が閾値を超える場合には、動き単位ブロックとする。動き列ブロック決定手段7は、ある単位ブロックと同じ列に属する単位ブロックの集合を列ブロックとして定義し、各列ブロックに動き単位ブロックが存在する場合には動き列ブロックとして決定する。動き行ブロック決定手段9は、各行ブロックに動き単位ブロックが存在する場合には動き行ブロックとして決定する。第1矩形動き画像領域決定手段11は、動き行ブロックおよび動き列ブロックの双方に属する単位ブロックで特定される矩形領域を矩形動き画像領域として決定する。
(もっと読む)
画像処理装置
【課題】グラフカット法を用いて撮像画像から溶接部に対応する領域を抽出する画像処理装置において、領域の抽出精度の向上を図る。
【解決手段】撮像画像における前景領域および背景領域と推定される推定領域を仮初期領域として撮像画像に対して指定し(S31)、グラフカット法を用いて仮初期領域を基準として撮像画像から溶接部23に対応する仮領域を抽出する(S32、S33、S35)。そして、抽出した仮領域を膨張させた膨張領域を撮像画像から除外した領域を背景領域に対応する背景初期領域とし、かつ、仮領域を収縮させた収縮領域を前景領域に対応する前景初期領域として撮像画像に対して指定し(S34)、グラフカット法を用いて指定した背景初期領域および前景初期領域を基準として撮像画像から前景領域を抽出する(S36)。
(もっと読む)
画像処理装置および方法、並びにプログラム
【課題】より精度よく高速にグローバル動きベクトルを求めることができるようにする。
【解決手段】解像度変換部は、撮像画像を解像度の異なる複数の縮小画像に変換し、局所特徴量算出部は、各縮小画像から局所特徴量を算出する。積分射影部は、抽出された局所特徴量を所定方向の軸に射影することで射影特徴ベクトルを算出し、グローバル動きベクトル算出部は、連続する2つのフレームの射影特徴ベクトルのマッチング処理を行うことにより、撮像画像の解像度ごとにグローバル動きベクトルを算出する。また、信頼度算出部は、射影特徴ベクトルに基づいてグローバル動きベクトルの信頼度を算出する。グローバル動きベクトル選択部は、信頼度に基づいてグローバル動きベクトルを選択する。本発明は、撮像装置に適用することができる。
(もっと読む)
焦点に基づく動的シーンの深度再構成のための装置および方法
【課題】動的シーンが、レンズおよびセンサを備えるカメラを用いて、焦点深度を変更しながら動的シーンの焦点スタックを最初に取得することによって、深度および拡張被写界深度ビデオとして再構成される。
【解決手段】焦点スタックのフレーム間のオプティカルフローが求められ、そのオプティカルフローにしたがってフレームをワープして、フレームを位置合わせし、仮想静的焦点スタックを生成する。最終的に、デプス・フロム・デフォーカスを用いて、仮想静的焦点スタックごとの深度マップおよびテクスチャマップが生成され、そのテクスチャマップはEDOF画像に対応する。
(もっと読む)
101 - 110 / 2,724
[ Back to top ]