
国際特許分類[G06T7/20]の内容
物理学 (1,541,580) | 計算;計数 (381,677) | イメージデータ処理または発生一般 (58,387) | イメージ分析,例.ビットマップから非ビットマップへ (10,245) | 動きの分析 (2,724)
国際特許分類[G06T7/20]に分類される特許
61 - 70 / 2,724
画像処理装置、画像処理方法、および、プログラム
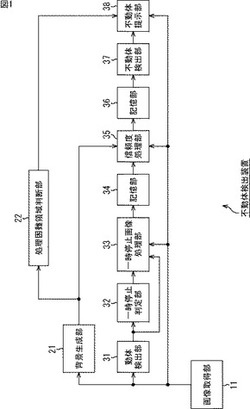
【課題】誤検出を抑制した、頑強な不動体検出を行う。
【解決手段】取得される映像から、多項分布の背景モデルを生成し、背景を生成する生成部と、生成部により生成された背景モデルから、信頼度の高い背景が生成できるか否かを判断する判断部を備え、現画像において、生成される背景とは異なる部分の画像である動体が検出され、動体が、所定の一定時間以上停止しているかどうかが判定される。一定時間以上停止している動体である一時停止オブジェクトが映る一時停止画像と、現画像とが用いられて、現画像の画素について、所定の時間以上変化がない、背景とは異なる不動体であることの確からしさを表す不動体信頼度が求められる。求められた不動体信頼度に基づいて、現画像から、不動体が検出される。本技術は、例えば、物体の置き去りや持ち去り等を検出する不動体の検出に適用できる。
(もっと読む)
ジェスチャ認識装置、電子機器、ジェスチャ認識装置の制御方法、制御プログラムおよび記録媒体

【課題】ユーザのジェスチャが画角内に収まっていない場合に通知する。
【解決手段】カメラが撮像した画像にユーザが写っているか否かを判定し、写っていなければ、ジェスチャが撮像されていないことを通知する。
(もっと読む)
モバイルモーションキャプチャカメラ
【課題】複数の俳優を収容することのできるボリューム内で身体動作と顔動作を共に同時に取り込むことを可能にするモーションキャプチャシステムを提供する。
【解決手段】動作を取り込むシステム(10)は、少なくとも1つの移動物体上の複数の地点を定義するマーカを有する少なくとも1つの移動物体を含むように構成されたモーションキャプチャボリューム(30)と、モーションキャプチャボリューム(30)内で可動となるように構成された少なくとも1つのモバイルキャプチャカメラ(16)と、少なくとも1つのモバイルモーションキャプチャカメラ(16)と結合され、少なくとも1つの移動物体の運動のデジタル表現を生成するモーションキャプチャプロセッサ(12)とを備える。
(もっと読む)
画像処理装置、方法、プログラム、および監視システム
【課題】監視対象者の一定時間の行動状態を把握する。
【解決手段】短背景生成部123が、滞在者が動くとき、滞在者の当該動いた部分がフレーム間で撮像画像における同一位置にいなくなるように設定されたフレーム数間引きした、複数フレームの撮像画像から短背景画像を生成し、背景生成部124が、滞在者がフレーム間で短背景画像における同一位置にいなくなるように設定されたフレーム数間引きした、複数フレームの短背景画像から背景画像を生成し、変化検出部125が、短背景画像と撮像画像の差分から変化抽出画像を生成する。そして、継続検出部126が、短背景画像と背景画像の差分から継続抽出画像を生成し、滞在者検出部122が、変化抽出画像と、継続抽出画像から監視対象者である滞在者の状態を示す情報を算出する。
(もっと読む)
監視装置、その方法、及び、そのプログラム
【課題】監視対象物が移動しても確実に追従できる監視装置を提供する。
【解決手段】監視対象物を指し示す指示部22と、前記監視対象物を撮像して時系列の画像を取得するカメラ12と、前記時系列の画像から複数の特徴点を抽出すると共に、前記各特徴点の移動量を算出し、予め設定された基準移動量より前記移動量が大きな特徴点の第1の集合の移動先位置Bを予測する予測部14と、前記時系列の画像間の差分に基づいて変化領域を抽出し、前記変化領域の重心位置Oを検出する検出部16と、前記平均移動量が第1の閾値と比較して大きい場合には前記移動先位置Bを指示位置と設定し、小さい場合には前記重心位置Oを指示位置と設定する判定部18と、前記指示部が前記指示位置を指し示すように前記指示部を制御する制御部20とを有する。
(もっと読む)
物体運動推定装置、物体運動推定方法及びプログラム
【課題】 従来のオプティカルフロー推定法と比較して、推定精度を向上させ、かつ、例えば照明変動などに対して頑健な物体運動推定装置等を提供する。また、運動物体の境界等も検出可能とする。
【解決手段】 物体運動推定装置(1)は、画像データの系列における物体の運動を表すオプティカルフローを、動的システムモデルに基づき推定する。この動的システムモデルの状態は、画像データの推定領域における各ピクセルの輝度、及び、各ピクセルの全部又は一部でのオプティカルフローである。輝度時間発展部(11)は、ある時刻の状態における輝度及びオプティカルフローから、新たな時刻の輝度を演算する。オプティカルフロー時間発展部(13)は、少なくとも、ある時刻の状態におけるオプティカルフローから、新たな時刻の状態におけるオプティカルフローを演算する。
(もっと読む)
移動体追跡装置、移動体追跡方法及びプログラム
【課題】距離画像によって構成される動画像を解析し、移動体を追跡する場合において、移動体同士が接触或いは重複していたとしても、各移動体を区別して追跡することができる移動体追跡装置等を提供する。
【解決手段】移動体追跡装置1は、距離情報から距離画像を生成し(S1)、距離画像の2値化、ノイズ除去を行い(S2)、撮影時刻が隣接する2つの距離画像から各々移動体領域を1つずつ特定し、特定された2つの移動体領域の組ごとに重複領域を抽出し、重複領域の面積情報が所定値以上であった場合には移動体領域の組が同一の移動体であると判定し(S3)、同一の移動体であると判定された移動体領域の組について、移動体の移動位置を追跡する(S4)。
(もっと読む)
被写体3次元領域推定方法およびプログラム
【課題】同期撮影された複数のカメラ映像を統合的に扱うことで、被写体3次元位置推定の精度を向上させる。
【解決手段】初期フレームにおける被写体の3次元世界座標と、複数のカメラで撮影された複数フレームのカメラ画像とから、前記初期フレームにおける被写体の3次元世界座標を特定平面上のXY座標に射影し、前記特定平面上の被写体のXY座標を時間軸情報に基づき推定し、前記特定平面上の被写体のXY座標をカメラ間情報に基づき評価することで、後続フレームにおける被写体の3次元世界座標を推定する。
(もっと読む)
移動物体追跡装置及び参照点追跡方法
【課題】移動物体上のある点に対して移動物体の移動速度方向から所定角度だけ回転した方向に所定長離れた点の位置を精度良く把握可能な移動物体追跡装置を提供する。
【解決手段】移動物体の所定の部位を画像追跡点として撮像し、取得した画像追跡点の画像データより、追跡のための追跡原点座標と移動物体の画像追跡点の座標との差異を表す追跡誤差を得る。この追跡誤差に基づいて、追跡角速度に移動物体に対する撮像器の追従遅れを補正した視軸角速度を算出する。同時に、移動物体との間の相対距離と、移動物体追跡装置自身の移動速度を計測する。得られた視軸角速度と相対距離と移動物体追跡装置自身の移動速度に基づいて、画像追跡点から移動物体の移動速度方向から所定の角度だけ回転した方向に所定長さだけ離れた参照点を追跡するための参照点追跡角度を算出する。
(もっと読む)
オブジェクト追跡装置
【課題】ズーム処理によって対象オブジェクトのサイズが変化しても、高速かつ高精度に対象オブジェクトを追跡することができるオブジェクト追跡装置を提供する。
【解決手段】探索領域設定部9は、現時点のフレーム画像のズーム倍率が前時点のフレーム画像のズーム倍率と異なる場合には、前時点のフレーム画像におけるオブジェクト領域、前時点のフレーム画像におけるズームの中心座標、前時点のフレーム画像のズーム倍率と現時点のフレーム画像のズーム倍率との比に基づいて、現時点のフレーム画像におけるオブジェクトの探索領域を設定する。正規化部10は、現時点のフレーム画像に含まれるオブジェクトの探索領域の画像を固定サイズに正規化する。マッチング部11は、正規化された探索領域の画像の中から、テンプレート画像と類似するオブジェクト領域を検索する。
(もっと読む)
61 - 70 / 2,724
[ Back to top ]