
国際特許分類[G06T7/20]の内容
物理学 (1,541,580) | 計算;計数 (381,677) | イメージデータ処理または発生一般 (58,387) | イメージ分析,例.ビットマップから非ビットマップへ (10,245) | 動きの分析 (2,724)
国際特許分類[G06T7/20]に分類される特許
41 - 50 / 2,724
被写体追尾装置およびカメラ
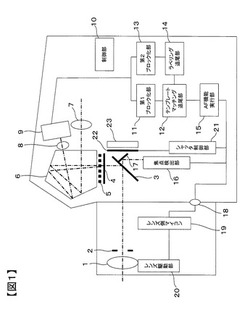
【課題】被写体を正確に追尾できること。
【解決手段】被写体追尾装置は、入力画像内に設定した第1の探索範囲内の画像に対してテンプレートマッチング処理を行い、追尾被写体位置を特定する第1の追尾手段12と、入力画像内に設定した第2の探索範囲内の画像に対してラベリング処理を行い、追尾被写体位置を特定する第2の追尾手段14と、を備え、第1の追尾手段12が特定した追尾被写体位置と、第2の追尾手段14が特定した追尾被写体位置との距離が所定値未満である場合には、第1の追尾手段12または第2の追尾手段14が特定した追尾被写体位置を用いて次回の第1の探索範囲を設定し、第1の追尾手段12が特定した追尾被写体位置と、第2の追尾手段14が特定した追尾被写体位置との距離が所定値以上である場合には、第2の追尾手段14が特定した追尾被写体位置を用いて次回の第1の探索範囲を設定する。
(もっと読む)
映像に基づく車両用警報システム

【課題】
任意の車両に搭載可能な警報システムにおいて、移動物体を効率的に検出する。
【解決手段】
本システムは、車両の周囲を連続的に撮影する少なくとも一つのカメラを有している。これにより、移動物体を監視する。また、カメラ画像におけるピクセルモーションに基づいて、任意の移動物体の運動を計算するようプログラムされたコンピュータユニットを備える。さらに、危険な移動物体が検出されたときに警報信号を発するための警報ユニットを備える。この判断を行うために、少なくとも一つの移動物体についての前記計算した運動と、予め定められた運動パターンとの関連性の調査又は比較を行う。
(もっと読む)
ジェスチャ認識装置及びそのプログラム
【課題】ジェスチャにより入力された多種類の図形を簡単なアルゴリズムで短時間に認識できるようにし、これによりリアルタイム性の向上を図る。
【解決手段】指位置蓄積部25に格納されたジェスチャの開始から終了までの間の描画点の位置座標の集合をもとに描画軌跡を表す画像を作成し、この描画軌跡を表す画像を含む最小の矩形領域を枠パターンを用いて切り取る。そして、この切り取られた描画軌跡を含む最小面積の矩形領域画像のサイズを正規化したのち、この矩形領域画像をもとにSVM using DtB を応用した認識アルゴリズムにより上記描画軌跡により表される図形を認識する。この認識処理は、矩形領域画像の4辺を一辺ずつ順に選択し、選択された辺から描画軌跡までの距離情報(DtB 情報)を算出してSVMモデルに入力することにより図形を識別する処理を、該当する図形が認識できるまで繰り返すことで行われる。
(もっと読む)
通信装置、及びその通信システム
【課題】より適切にコンテンツデータを通信することができる通信装置、及びその通信システムを提供する。
【解決手段】通信装置100は、所定の規格に基づく通信プロトコルを処理する通信プロトコル処理部130と、前記通信プロトコル処理部の制御を受けてデータ送信先装置との通信処理を実行する通信部171とを備える。通信プロトコル処理部130は、通信プロトコルで定義される送信コマンドに自装置の機種特定情報511を所定の規格の拡張情報として含ませる。
(もっと読む)
目標物管理装置および目標物管理方法
【課題】本発明は、目標物が存在する可能性のある区域を精度よく推定する目標物管理装置および目標物管理方法を提供する。
【解決手段】監視対象範囲を一定の区域からなるメッシュに区切り、管理するメッシュ管理部と、探知した目標物の情報を有する探知情報を用いて、目標物の存在するメッシュを決定し、時間経過に応じて目標物の存在する目標存在メッシュを推定する目標推定部と、目標物と新たに入力された探知情報に含まれる目標物が同一であるかを判定し、目標存在メッシュを更新する同一化判定部と、目標物がない地域を示す否定情報を受信すると、地域に対応する目標物がないメッシュを前記目標存在メッシュに反映し、反映した目標存在メッシュを更新する反映部と、を備えることを特徴とする目標管理装置である。
(もっと読む)
情報処理装置、情報処理方法、情報処理装置用プログラム、および、記録媒体
【課題】対象物の追跡が正確にできる情報処理装置等を提供する。
【解決手段】動画の予め選択された1のフレームの画像における対象物2上に少なくとも1つのパーティクルpを設定し(S3)、予め選択された1のフレーム20以降、動画における時間的に前のフレームと時間的に後のフレームとを順次取得し(S4)、取得される前のフレームの画像と後のフレームの画像との背景差分画像30を算出し(S5)、算出された背景差分画像に応じて、パーティクルの追跡範囲の外縁3aを決定し、前のフレームの画像におけるパーティクルの位置を基準とする所定範囲内かつ追跡範囲の外縁内であって、基準としたパーティクルの位置の画素の色情報と類似の色情報を有する画素の位置に、後のフレームの画像におけるパーティクルを設定し(S6)、設定されたパーティクルの位置から、後のフレームの画像における対象物の位置を特定する(S9)。
(もっと読む)
画像処理装置、画像処理方法
【課題】 現実空間画像において、仮想空間画像を重畳させない領域を適切に設定するための技術を提供すること。
【解決手段】 キー領域抽出部303は、現実空間画像において予め定められた画素値を有する画素で構成される第1の領域を抽出する。動きベクトル検出部304は、現実空間画像上の複数箇所における動きベクトルを求める。被写体領域抽出部305は、動きベクトルを用いて、第1の領域にマージする第2の領域を特定する。画像合成部308は、仮想空間画像を現実空間画像上に重畳させる際に、第1の領域と第2の領域とをマージした合成領域は、仮想空間画像の重畳対象外とすることを特徴とする。
(もっと読む)
移動物体追跡装置
【課題】監視空間内の移動物体を監視画像上にて追跡する装置において、注目物体が密集する他物体に接近する場合に取り違えを防止する処理を適切に行うことが容易ではない。
【解決手段】仮説設定部51は複数の物体について現時刻における候補位置を過去位置から複数予測する。尤度算出部52は、注目物体の各移動先候補について、画像特徴に基づき当該物体の移動先らしさの度合いを表す評価値を求める。また、当該移動先候補での他物体の存在蓋然性を表す存在度に応じて、評価値を低める補正を行う。その一方で、注目物体の移動先候補の一部について前記補正を弱める評価値補償を行い、他物体の譲歩を前記評価値に反映させる。この補正及びその限定的な補償を行った評価値から当該注目物体の移動先位置を判定する。
(もっと読む)
検索装置、検索方法、記録媒体、ならびに、プログラム
【課題】ユーザの意思に基づいて位置が定められるオブジェクトの位置から検索クエリに指定すべき指定長を得る検索装置等を提供する。
【解決手段】検索装置101において、検知部102は、現実空間内でユーザの意思に基づいて位置が変化する複数のオブジェクトのそれぞれの位置を検知する。算出部103は、検知された複数のオブジェクトの位置から、ユーザの意思に基づく指定長を算出する。検索部104は、少なくとも、商品サイズと、商品画像と、を有する商品レコードが管理される商品データベースから、算出された指定長に基づく検索条件を満たす商品サイズを有する商品レコードを検索する。表示部105は、検索された商品レコードが有する商品画像を画面に表示する。
(もっと読む)
画像処理装置、画像処理方法及びプログラム
【課題】対象物体の追尾を適切に打ち切る。
【解決手段】消失領域設定部602は、撮像部601により撮像された画像データに対して領域を設定する。物体追尾部603は、画像データ内における対象物体を追尾し、対象物体が前記領域内に入った場合、対象物体の追尾を停止する。
(もっと読む)
41 - 50 / 2,724
[ Back to top ]