
国際特許分類[G06T7/20]の内容
物理学 (1,541,580) | 計算;計数 (381,677) | イメージデータ処理または発生一般 (58,387) | イメージ分析,例.ビットマップから非ビットマップへ (10,245) | 動きの分析 (2,724)
国際特許分類[G06T7/20]に分類される特許
81 - 90 / 2,724
動作認識装置および動作認識方法
【課題】対象となる人物が道具を把持した状態で動作を行った場合にも、正しく動作認識を行うことができるようにする。
【解決手段】撮像した画像を入力する画像入力手段と、前記画像入力手段より入力された画像より、人体の手を認識するパーツ認識手段と、前記画像より、道具の存在領域と当該道具の種類とを認識する道具認識手段と、前記人体の手が、前記道具を把持しているかどうかを判定する把持状態判定手段と、前記把持状態判定手段の判定結果を用いて、前記パーツ認識手段に認識された人体の手の一方を主パーツとし、前記主パーツに前記道具の種類に応じた主動作認識手段を対応させるとともに、前記認識された人体の他方の手を副パーツとし、前記副パーツに前記道具の種類に応じた副動作認識手段を対応させる認識機能選択手段と、前記認識機能選択手段、道具認識手段、把持状態判定手段、および認識機能選択手段の結果を記憶する状態記憶手段とを設ける。
(もっと読む)
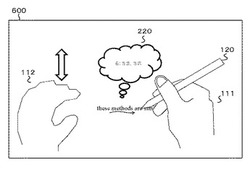
コミュニケーション支援システム

【課題】誤認識の場合でも誤ったメッセージが話し相手に伝わることを避けることができる発話障害者のための、あるいは異なる言語間の通訳のための、読唇技術を利用した実用性の高いコミュニケーション支援システムを提供する。
【解決手段】事前に登録した発話内容の中から話し相手に伝えたい発話内容を、その口唇の動きに基づきその特徴量をリアルタイムに計測し、この計測された特徴量とデータベースに登録されている特徴量を比較して、発話内容を判断して認識結果をコントローラに出力する。コントローラの指示に基づき正しい認識結果を出力部に出力する。
(もっと読む)
動体追跡装置
【課題】複数動体が交差しても、効率的かつ正確に動体追跡する。
【解決手段】時系列の連続原画像P(i)からなる動画を画像入力部110で入力し、動体識別画像生成部130により、背景画像との差分をとり、背景と前景を区別する動体識別画像M(i)を生成する。トラッカー格納部150は、個々の動体の輪郭に外接するブロッブ包摂図形を、時系列で格納する。マスキング処理部140は、トラッカー格納部150内の時刻t(i−1)の着目動体Tj以外の動体のブロッブ包摂図形を利用して、動体識別画像M(i)の前景領域をマスキングする。ブロッブ包摂図形抽出部170は、マスキング部分を除く前景領域の輪郭を候補ブロッブ包摂図形として抽出する。トラッカー登録部160は、着目動体Tjの先行ブロッブ包摂図形Bj(i−1)に対する後続ブロッブ包摂図形Bj(i)を候補ブロッブ包摂図形の中から選択し、トラッカー格納部150に登録する。
(もっと読む)
ユーザ凝視データに基づいた時空間データのセグメント化
【課題】ビデオデータを簡単にセグメント化する。
【解決手段】ユーザにセグメント化タスクを特定し、時空間データを複数フレームとして見ているユーザの目の動きをモニタして生成された凝視データを受信する。凝視データはフレーム全体に渡るユーザの凝視に基づく固定位置を含む。フレーム中の第1および第2のフレームを固定位置に基づいて選択する。第1および第2のフレームに関連する興味ある領域に基づいて第1および第2のフレーム上でセグメント化を実施し、これらのフレームから第1および第2のオブジェクトをセグメント化する。興味ある領域は固定位置の1個に相当する。第1および第2のオブジェクトがセグメント化タスクに関連するか否かを決定し、関連する場合第1および第2のオブジェクトが生成されると、第1のオブジェクトを第2のオブジェクトに関連付けるため関連データを生成する。
(もっと読む)
画像処理装置、画像処理方法及び画像処理プログラム
【課題】ユーザの意図しない動作がジェスチャと誤認識されるのを防止することを課題とする。
【解決手段】画像処理装置10は、画像を取得する。さらに、画像処理装置10は、取得された画像からジェスチャを認識する対象を特徴付ける領域を抽出する。さらに、画像処理装置10は、画像のフレーム間で領域同士を対応付ける。さらに、画像処理装置10は、画像のフレーム前後で領域が移動した移動方向を抽出する。さらに、画像処理装置10は、画像のフレーム前後で領域が移動した移動距離が所定の閾値よりも大きい場合に移動方向を出力する。さらに、画像処理装置10は、閾値を超えた移動距離を用いて閾値を更新する。
(もっと読む)
画像処理装置、画像処理方法、撮像装置、電子機器、及び、プログラム
【課題】局所的な動被写体や照度変化等にロバストであり、又、精度の高いグローバル動き探索処理を行なうことができる技術を提供する。
【解決手段】画像処理装置は、処理対象画像を複数の分割画像にする画像分割部と、複数の分割画像の内で、動き探索処理の信頼性が閾値以上である若しくは信頼性が相対的に高い分割画像を選択する分割画像選択部と、分割画像ごとに動き探索処理を行なう第1の動き探索処理部と、選択された分割画像についての第1の動き探索処理部による動き探索処理の情報に基づいて、画像分割を行なわない画像全体に対して動き探索処理を行なう第2の動き探索処理部とを備える。
(もっと読む)
近距離動作のトラッキングのシステムおよび方法
【課題】ユーザの手および指の動きをトラッキングし、トラッキングデータを用いて装置とのユーザの相互作用を制御するための高度な方法を提供する。
【解決手段】近距離の対象物をトラッキングするためのシステムおよび方法において、奥行きセンサ110を用いて、ユーザの手および指またはその他の対象物の近距離の奥行き画像が取得される。奥行きセンサから得られる奥行き画像データを用いて、ユーザの手および指またはその他の対象物の動きが特定されてトラッキングされる。そして、ユーザの手および指または他の対象物の位置や動きを用いて、ユーザは、画面に表示される対象物と相互作用することができる。
(もっと読む)
被写体追跡プログラムおよび被写体追跡装置
【課題】時系列に入力されるフレーム画像において適切に主要被写体を追跡すること。
【解決手段】被写体追跡プログラムは、時系列で入力される各フレーム画像の色情報および輝度情報に基づいて複数の要素画像を生成する要素画像生成処理と、複数の要素画像をそれぞれ2値化して複数の2値化要素画像を生成する2値化要素画像生成処理と、複数の2値化要素画像を論理積演算する論理積演算処理と、論理積演算後の2値論理積画像に対するラベリング処理に基づいて、各フレーム画像における主要被写体の位置を特定する特定処理と、特定処理で特定された範囲と所定範囲との論理積演算に基づいて特定された範囲を縮小する縮小処理と、前フレーム画像において縮小処理で縮小された範囲を膨張させて所定範囲を得るモルフォロジー処理と、をコンピュータに実行させる。
(もっと読む)
コマンド発行装置、コマンド発行方法およびプログラム
【課題】送り動作と、送り動作とは異なる動作(例えば復帰動作や予備動作等)とを区別可能なコマンド発行装置、コマンド発行方法およびプログラムを提供する。
【解決手段】実施形態のコマンド発行装置は、取得部と検出部と第1設定部と第2設定部と第1算出部と第2算出部と発行部とを備える。取得部は、被写体を撮像した画像を取得する。検出部は、画像から、被写体の特定部分を検出する。第1設定部は、検出部で検出された特定部分の位置を示す特定位置を設定する。第2設定部は、画像のうち基準となる位置を示す基準位置を設定する。第1算出部は、基準位置から特定位置へ向かう位置ベクトルを算出する。第2算出部は、コマンドベクトルごとに、当該コマンドベクトルと位置ベクトルとの一致度を示す第1パラメータを算出する。発行部は、第1パラメータの値に基づいてコマンドを発行する。
(もっと読む)
エッジ検出装置およびそのプログラム
【課題】照明等の撮影条件が変化した場合であっても、映像を構成するフレーム画像のそれぞれからエッジを正確に検出することができるエッジ検出装置およびそのプログラムを提供する。
【解決手段】エッジ検出装置1は、第1閾値および第2閾値を用いて映像を構成するフレーム画像ごとのエッジ点を検出するエッジ検出手段20と、現フレーム画像のエッジ点から当該エッジ点とエッジ勾配強度およびエッジ方向が類似する前フレーム画像のエッジ点を追跡するエッジ追跡手段40と、エッジ検出手段20によって検出されたエッジ点を分布化してガウス混合モデルを生成するとともに、エッジ追跡手段40によって追跡が成功したエッジ点を追加してガウス混合モデルを更新するモデル生成・更新手段50と、生成または更新されたガウス混合モデルの平均値および標準偏差から第1閾値および第2閾値を算出する閾値算出手段60と、を備えている。
(もっと読む)
81 - 90 / 2,724
[ Back to top ]