
国際特許分類[G06T7/20]の内容
物理学 (1,541,580) | 計算;計数 (381,677) | イメージデータ処理または発生一般 (58,387) | イメージ分析,例.ビットマップから非ビットマップへ (10,245) | 動きの分析 (2,724)
国際特許分類[G06T7/20]に分類される特許
31 - 40 / 2,724
自車移動推定方法および自車移動推定プログラム
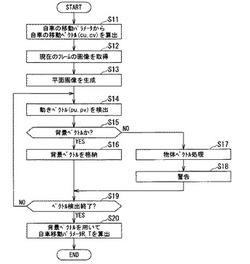
【課題】画像内に大きな物体が存在しても正確に自車移動パラメータを推定することができる自車移動推定方法および自車移動推定プログラムを提供する。
【解決手段】本発明の一実施形態に係る自車移動推定方法は、車両に設けられたカメラが所定のフレーム周期で前記車両の周囲を撮像するステップと、前記カメラにより撮像された複数の画像間の動きベクトルを検出するステップと、検出された動きベクトルから自車の移動パラメータを求めるステップと、前記自車の移動パラメータを求める際に利用された前記複数の画像の撮像の後に前記カメラにより撮像された画像を用いて新たに動きベクトルを検出するステップと、前記新たに検出された動きベクトルのうち、前記自車の移動パラメータに対応する自車の移動ベクトルとの比較で所定の閾値以内であるものを背景ベクトルとして検出するステップと、この背景ベクトルを用いて新たに自車の移動パラメータを求めるステップと、を有する方法である。
(もっと読む)
姿勢推定装置、姿勢推定方法及び姿勢推定プログラム

【課題】2次元の関節位置の安定した推定を行い、それに伴って3次元の姿勢推定の精度の向上を実現することができる姿勢推定装置を提供する。
【解決手段】3次元動作モデルデータを参照して、追跡対象について、初期の位置候補を複数設定する手段と、入力した画像から、追跡対象の位置候補における特徴量を算出し、該特徴量をテンプレート記憶手段に記憶されたテンプレートデータと比較した結果得られる類似度の重みに基づき、追跡対象の位置を推定し、追跡対象の位置の推定情報を出力する手段と、類似度の重みと、3次元動作モデルデータに基づき、追跡対象の位置候補を改めて設定する手段と、追跡対象の位置の推定と、追跡対象の位置候補の設定とを複数回数繰り返すことにより、追跡対象の位置を追跡する手段と、追跡対象の位置の推定情報と、3次元動作モデルデータを参照して、姿勢推定対象の3次元姿勢を推定する手段とを備えた。
(もっと読む)
車両周辺監視装置
【課題】物体が存在しない場所で、誤ってオプティカルフローを検出することのない車両周辺監視装置を提供する。
【解決手段】カメラ(撮像手段)100で異なる時刻に撮像した2つの画像に基づいて、オプティカルフロー検出手段240が第1のオプティカルフロー(F1)を検出し、オプティカルフロー推定手段230が、仮想面設定手段220によって路面から所定距離だけ高い位置に設定された第1の仮想面の上に生じる第2のオプティカルフロー(F2)を推定して、オプティカルフロー差分演算手段250が、F1からF2を差し引いて、物体検出手段260が、差分演算結果に基づいて車両の周辺に存在する物体を検出し、接触判定手段270が、物体が車両10に接触する可能性があると判定したときに、警報出力手段400が警報を出力する。
(もっと読む)
画像処理装置、方法、及びプログラム
【課題】カラー画像またはカラー画像から生成した白黒画像と単波長画像間での対応点検出精度を向上させる。
【解決手段】分光反射率画像生成部11で、カラー画像の画素値、RGBカメラ20の分光感度、観察照明光のスペクトル、及び被写体の統計的性質から求められた先見情報を用いて、ウィナー推定により画素毎の分光反射率を推定し、推定した分光反射率を画素値とする分光反射率画像を生成する。単波長画像生成部12で、生成された分光反射率画像、観察照明光のスペクトル、狭帯域バンドパスフィルタの分光透過率、及びRGBカメラ20の分光感度を用いた撮影シミュレーションにより、撮影単波長画像と同じ波長帯域の単波長画像を生成する。位相画像生成部13a、13b、相関画像生成部14、及び対応点検出部15で、生成された単波長画像と撮影された単波長画像との対応点を検出する。
(もっと読む)
映像検出装置および映像検出方法並びに映像検出プログラム
【課題】所望の事象の進展を表す映像に類似した映像を高い精度で検出する映像検出装置および映像検出方法並びに映像検出プログラムを提供する。
【解決手段】所望の事象の進展を表す基準映像を保持する保持部と、前記基準映像に基づいて、当該基準映像における前記事象の進展の速度を含む複数の速度で前記事象の進展を表す複数の調整映像を生成する生成部と、蓄積装置に蓄積された各蓄積映像と、前記複数の調整映像のそれぞれとの類似度を評価する評価部と、前記評価部で得られた評価結果に基づいて、前記複数の調整映像のいずれかに類似する前記蓄積映像を、前記基準映像に類似する映像として取り出す検出部とを有する。
(もっと読む)
動きベクトル算出装置
【課題】映像信号の動きベクトル算出のための演算量を著しく低減するとともに、固定小数点処理をし易くする。
【解決手段】動画像の画像ブロック毎の動きベクトルを算出するために、3次元で定義された一〜三番目の固有値λ1〜λ3のうち、固有値λ1,λ2は近似する静止画の固有値λ'1,λ'2を代用することで、2次固定方程式で求め、精度を必要とする固有値λ3は、通常の分散式で求めている。このように、3次固定方程式を用いることなく動きベクトルを求めることで、演算量を少なくして時間内の処理と動きベクトルの算出精度を向上させることが可能となる。
(もっと読む)
商品読取装置及びプログラム
【課題】オペレータが意図したタイミングで画像認識を行うことが可能な商品読取装置及びプログラムを提供する。
【解決手段】時間的に連続する複数枚の画像を撮像する撮像手段と、前記画像に含まれる商品を画像認識し、当該商品の候補となる候補商品を導出する画像認識手段と、表示手段と、前記候補商品の各々を前記表示手段に表示させる表示制御手段と、前記表示手段に表示された候補商品の選択操作を受け付ける操作受付手段と、前記複数枚の画像からユーザーの動作を検出する動作検出手段と、前記動作検出手段で検出された動作が、所定の動作パターンに相当するか否かを判定する動作判定手段と、前記動作判定手段の判定結果に基づいて、前記画像認識手段及び前記表示制御手段の動作を制御する制御手段と、を備える。
(もっと読む)
ジェスチャー解読装置
【課題】ジェスチャ操作を、特定の場所で動作する必要があったり、解析動作が複雑で処理の負荷が大きく部屋に居る人の全体の平均的空調制御を行うものであった。
【解決手段】温度検知手段103と、温度検知手段103で画像化した温度レベルが所定値以下で画像化した温度レベル数以下の温度レベルに分類するための温度レベル分け手段104と、温度分布情報保持手段105と、保持情報のうち最も高い温度レベルの画素の重心から所定範囲を解読範囲とする解読枠設定手段106と、ジェスチャー解読手段102を備え、解読枠設定手段106で設定された解読範囲の温度レベルの時間変化を元に解読を行うことで、人の操作位置の制限をなくし、しかも、処理の負荷量を減じて、使用者の体表温度状態を反映したジェスチャーを認識することができる。
(もっと読む)
オプティカルフロー検出装置及び検出方法
【課題】本発明は、マッチング探索処理中に無効フローを除去し、マッチング探索処理の処理時間の短縮を図ることを目的としている。
【解決手段】このため、オプティカルフロー検出装置において、マッチングスコア算出手段とマッチングスコア差分算出手段とマッチングスコア差分判定手段とフロー内積算出手段とフロー内積評価手段とを備え、マッチング探索時、差分がしきい値以下の時に、フロー内積算出手段により内積値を算出し、フロー内積評価手段により無効フロ一を除去する。また、オプティカルフロー検出方法において、現在画像の画像データと過去画像の画像データから前回と今回のマッチングスコアの差分を算出し、マッチング探索時、差分がしきい値以下の場合に、前回までのオプティカルフローと今回のオプティカルフローで内積値を算出し、内積値でオプティカルフローの方向性を判定して無効フローを除去する。
(もっと読む)
被写体追尾装置およびカメラ
【課題】被写体を正確に追尾できること。
【解決手段】被写体追尾装置は、入力画像内に設定した第1の探索範囲内の画像に対してテンプレートマッチング処理を行い、追尾被写体位置を特定する第1の追尾手段12と、入力画像内に設定した第2の探索範囲内の画像に対してラベリング処理を行い、追尾被写体位置を特定する第2の追尾手段14と、を備え、第1の追尾手段12が特定した追尾被写体位置と、第2の追尾手段14が特定した追尾被写体位置との距離が所定値未満である場合には、第1の追尾手段12または第2の追尾手段14が特定した追尾被写体位置を用いて次回の第1の探索範囲を設定し、第1の追尾手段12が特定した追尾被写体位置と、第2の追尾手段14が特定した追尾被写体位置との距離が所定値以上である場合には、第2の追尾手段14が特定した追尾被写体位置を用いて次回の第1の探索範囲を設定する。
(もっと読む)
31 - 40 / 2,724
[ Back to top ]