
国際特許分類[G06T7/60]の内容
物理学 (1,541,580) | 計算;計数 (381,677) | イメージデータ処理または発生一般 (58,387) | イメージ分析,例.ビットマップから非ビットマップへ (10,245) | イメージからの幾何学的属性の分析,例.面積,重心,周囲長の分析 (1,881)
国際特許分類[G06T7/60]に分類される特許
51 - 60 / 1,881
パターン測定方法
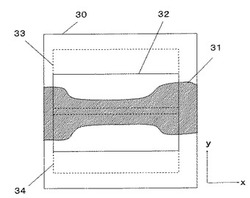
【課題】走査型電子顕微鏡で得られるパターンを撮像した画像から、フォトマスクのOPCパターンの寸法を精度良く且つ容易に測定することができるパターン測定方法を提供することを目的とする。
【解決手段】本発明のパターン測定方法は、フォトマスクのOPCパターンのうち、所望の範囲のパターンを包含する一回り大きい測定対象領域を設定し、測定対象領域のパターンの寸法を微小な領域毎に測定し、寸法の測定値を統計的に処理したものを曲線で近似し、近似曲線で表れるデータ群のうち、所望の範囲のパターン寸法に相当するデータ群の平均値を、所望の範囲のパターン寸法として推定する。
(もっと読む)
エゴモーション概算システムおよび方法

【課題】エゴモーション概算システムおよび方法の提供。
【解決手段】エゴモーション概算システムを利用してエゴモーションパラメータを決定するためのコンピュータ実施方法であって、第1の画像フレームおよび第2の画像フレームを取得することと、第1の画像フレームの第1の部分を選択して第1のサブ画像を取得し、かつ第2の画像フレームの第2の部分を選択して第2のサブ画像を取得することと、第1のサブ画像および第2のサブ画像に変換を実行して、それぞれ、第1の透視画像および第2の透視画像を取得することと、第2の透視画像を反復的に調整して複数の調整した透視画像を取得することと、第1の透視画像と複数の調整した透視画像との個々の差異それぞれに対応する複数の差分値を決定することと、複数の差分値のうちの1つに対応する、エゴモーションパラメータに関する並進ベクトルを決定することと、を含む、方法。
(もっと読む)
コーナー検出装置
【課題】 撮像状況によって分離して抽出された2つのエッジ間に存在するコーナーを検出できるコーナー検出装置を提供する。
【解決手段】 車両に搭載し、周囲環境を画像として撮像するカメラ1と、撮像された画像に対し、2方向以上の直線エッジ成分を抽出するエッジ抽出部3と、各エッジを構成する画素に対して、エッジの直交方向の速度であるフローを算出するフロー算出部4と、エッジ端をエッジ方向(エッジの延びる方向)に延長するエッジ延長部5と、延長されたエッジに基づき、方向の異なるエッジ同士の交点をコーナーとして判別するコーナー判別部6と、を備え、エッジ延長部5は、延長した先に同じ大きさを有するフローが存在する場合、延長を有効と見なして再線化する。
(もっと読む)
命令信号送信装置およびその動作方法
【課題】操作が容易で、ロバスト性が高い命令信号送信装置およびその動作方法を提供する。
【解決手段】画像取得部14が、カメラ12で撮像された画像を取得し、画像特徴検出部15が、カメラ12の前の空間の少なくとも一部が塞がれることにより画像に生じる特徴を検出する。検出された特徴が予め定められた条件を満たすなら、命令読出部16が、命令記憶部13から命令を読み出し、命令信号送信部17が、命令を示す命令信号をコンピュータ(112)に送信する。
(もっと読む)
レーン認識装置
【課題】撮像画像上でレーンが映らない場合でもレーン認識を可能にする。
【解決手段】レーン認識装置10は、自車両走行路の撮像画像内に第1画像処理領域を左右個別に設定して車線標示を検出する車線標示検出部31と、検出した撮像画像内の左右一方の車線標示及び車線幅に基づき撮像画像内において左右他方の車線標示位置を推定する車線標示位置推定部33と、自車両走行路の撮像画像内に第1画像処理領域を含みかつ第1画像処理領域よりも広い第2画像処理領域を設定して車線標示を検出する広域車線標示検出部34と、車線標示検出部31による車線標示の検出結果及び車線標示位置推定部33による車線標示位置の推定結果それぞれに対し広域車線標示検出部34による車線標示の検出結果とのマッチングを行う検出結果照合部35と、検出結果照合部35のマッチング結果に基づきレーンを認識するレーン認識状況判断部36とを備える。
(もっと読む)
画像処理装置、画像処理方法、画像形成装置、画像処理プログラム
【課題】帳票画像を読み取って罫線を認識する画像処理において、様々な形状を持つ罫線の角部を認識することができる。
【解決手段】幅と長さを有する罫線と、二つの罫線の角部領域に形成される角部罫線領域を有する画像を読み取る画像処理装置において、前記画像から、前記角部罫線領域を抽出する角部罫線領域抽出手段と、前記角部罫線領域の画像から、前記角部罫線領域の画像の特徴量を抽出する特徴量抽出手段と、前記角部罫線領域の複数の角部のパターンに対応した特徴量を保持する特徴量辞書と、前記特徴量抽出手段により抽出された特徴量と、前記特徴量辞書に保持されている前記角部のパターンの特徴量とを比較して一致度を算出し、所定の一致度を有する前記角部のパターンを前記角部罫線として抽出する角部罫線抽出手段と、を有する。
(もっと読む)
画像特徴抽出方法及び画像特徴抽出装置並びにこれを用いた画像照合方法及び画像照合装置
【課題】画像に含まれるエッジ情報に関し位置ずれによる影響を抑制しながらエッジに係る特徴を失うことなく抽出する。
【解決手段】入力画像に所定方向の微分フィルタを適用して微分画像を生成する微分画像生成工程と、この微分画像生成工程で生成された微分画像の微分値に基づいて正領域及び負領域を分離する正負分離工程と、この正負分離工程により分離された正領域に基づいて正画像を生成するとともに負領域に基づいて負画像を生成する正負画像生成工程と、この正負画像生成工程で生成された正画像及び負画像から各画像に含まれる正領域を膨張させた正特徴画像及び負領域を膨張させた負特徴画像を生成する特徴画像生成工程とを含む画像特徴抽出方法によって画像の特徴を抽出する。
(もっと読む)
情報処理装置、情報処理装置の制御方法、およびプログラム
【課題】画像の領域分割の処理時間を短縮させる技術を提供する。
【解決手段】画像に対して複数の局所領域を設定する設定部と、局所領域のそれぞれから特徴量を抽出する抽出部と、それぞれの特徴量に対するそれぞれの確率密度に基づいて、局所領域同士の非類似度を算出する算出部と、非類似度に基づいて複数の局所領域を領域群として統合する統合部と、を備える。
(もっと読む)
画像認識装置、画像認識方法及びプログラム
【課題】検出率を落とすことなく、被写体の周辺に発生する誤検出を低減できるようにする。
【解決手段】入力画像の尤度に基づいて前記入力画像が認識対象であることを判別する画像判別手段と、前記画像判別手段により判別された入力画像から、重複関係にある領域を抽出する抽出手段と、前記重複領域の重複状態を分類する分類手段と、前記尤度と前記重複状態とに基づいて前記重複領域が認識対象であることを判別する判別手段と、を備えた画像認識装置である。
(もっと読む)
画像処理装置、画像処理プログラム、ロボット装置及び画像処理方法
【課題】検出対象エッジに対して類似形状の非検出対象エッジを持つような状況下で照明の変化が起こった場合でも、検出対象エッジのみを安定して検出することが可能な画像処理装置、画像処理プログラム、ロボット装置及び画像処理方法を提供する。
【解決手段】サンプリング領域毎の平均輝度値に基づいて特徴量を設定し、エッジ選択のための閾値を特徴量ヒストグラムから求め、求めた閾値と、予め記憶しておいた検出対象エッジ、非検出対象エッジの特徴量との相対関係に基づき、検出対象エッジのみを選択する。このように、検出対象ワークの入力画像に対し、毎回エッジ特徴量を計算して、検出対象エッジと非検出対象エッジを分離するための特徴量の閾値を動的に算出できるので、照明装置の劣化等が原因で入力画像内の輝度変動が大きくなった場合でも、安定して検出対象エッジと非検出対象エッジとを分離し、的確に検出することができる。
(もっと読む)
51 - 60 / 1,881
[ Back to top ]