
国際特許分類[H02P27/02]の内容
電気 (1,674,590) | 電力の発電,変換,配電 (135,566) | 電動機,発電機,回転変換機の制御または調整;変圧器,リアクトルまたはチョークコイルの制御 (18,002) | 供給電圧の種類に特徴を有する交流電動機の制御装置または制御方法 (4,413) | 一定の周波数および可変振幅を有する供給電圧を使用するもの (64)
国際特許分類[H02P27/02]に分類される特許
1 - 10 / 64
制御装置
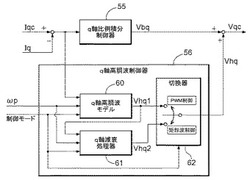
【課題】トルク指令に周期的なトルク振動が含まれる場合であっても、電流指令に対する追従性能を向上させるとともに、矩形波制御の実行が開始される場合に、矩形波の出力電圧波形の位相が急変することを防止できる交流回転電機の制御装置が求められる。
【解決手段】電流フィードバック制御部は、トルク振動の周波数の周期関数の特性を有する高調波モデルを用いた演算の出力値に少なくとも基づいて二相電圧指令を算出し、矩形波制御の実行が開始された場合は、トルク振動の周期に応じて設定された期間内でゼロとなるように、高調波モデルを用いた演算の出力値を徐々に変化させる減衰処理を実行する制御装置。
(もっと読む)
交流電動機の制御装置および制御方法

【課題】簡易な制御によって、高トルク領域からトルクを減少させる際のトルク追従性を高めることが可能な交流電動機制御を実現する。
【解決手段】インバータ14は、矩形波電圧制御モードでは、制御装置30からの制御信号S3〜S8に応答して、電力線7上の直流電圧を、矩形波電圧に変換して交流電動機M1へ印加する。制御装置30は、交流電動機M1の出力トルクがトルク指令値Tqcomと一致するように、矩形波電圧の位相を制御する。制御装置30は、交流電動機のトルクが高トルク領域においてトルクを減少する場合には、電圧位相の上限ガード値を通常時からトルク減少方向に変化させる。これにより、電圧位相の変化量が強制的に確保される。
(もっと読む)
アクチュエータ、モータ制御システム及びモータ制御方法
【課題】センサ総数を低減し、信頼性を向上したアクチュエータ、モータ制御システム及びモータ制御方法を提供する。
【解決手段】アクチュエータは、アクチュエータは、モータと、モータの回転を所定の変位に変換する被駆動機構と、被駆動機構の位置を規制する位置規制機構と、被駆動機構の変位を検出する位置センサと、位置規制機構により被駆動機構の位置が規制された状態での位置センサの出力変動を温度情報へ変換する制御装置と、を含む。
(もっと読む)
コアレスモーター、コアレスモーターを搭載したロボットハンド、およびロボット
【課題】トルクリップルがなく、電力効率の高いコアレスモーターを提供する。
【解決手段】N×M個の単位コイル112を2π/(N×M)の角度ずつずらして配列した空芯巻線の内側に、M極に着磁した永久磁石120を設ける。また、2π/Mの角度ずつずらして配列されたM個の単位コイルを一相分として、N相の単位コイルに分けて駆動する。そして、N相分の単位コイルの中で、永久磁石の磁極の境目に最も近い一相分の単位コイルでは電流を停止し、その単位コイルに対して回転方向に隣接する一相分の単位コイルでは電流の絶対値を増加させ、逆側に隣接する一相分の単位コイルでは電流の絶対値を減少させる。更に、何れにも該当しない単位コイルが存在する場合には、その単位コイルについては一定の電流を流して駆動する。こうすれば、トルクリップルがなく、電力効率の高いコアレスモーターを実現できる。
(もっと読む)
半導体電力変換装置
【課題】負荷運転時の更なる負荷急変時の負荷応答を高めた半導体電力変換装置を提供する。
【解決手段】コンバータ1と、直流コンデンサ2と、インバータ3と、電圧制御を行うコンバータ制御部7と、電流検出手段6と、速度検出手段5と、インバータ3の出力を制御するインバータ制御部8とで構成する。インバータ制御部8は、速度制御手段81と、ベクトル演算手段82と、トルク電流基準の変化率を制限するトルクレート制限手段84と、
トルク軸電流制御手段86と、磁束軸電流制御手段87と、ゲート制御手段88、89と、負荷率検出手段93と、負荷急変検出手段92とを有する。交流電動機4の負荷率が所定の閾値以上で且つ負荷急変検出手段92が負荷急変を検出したとき、トルクレート制限手段84のトルクレート制限値を標準値から切替値に切替える。
(もっと読む)
電動モータユニットの検査装置及び検査方法
【課題】モータ制御装置と電動モータが一体となった組込みユニットに対応し、精度が高い電動モータの良否判定を行う。
【解決手段】電動モータユニット10に入力される入力トルク信号を取得し、電動モータMの出力トルクを検出し、電動モータMの温度を検出し、検出された電動モータMの出力トルクを温度で補正し、温度補正された電動モータMの出力トルクの、入力トルクに対する関係を、あらかじめ用意した電動モータの出力トルクの入力トルクに対する基準関係に近づけるように、電動モータユニット10内で電動モータMに供給されるモータ電流を補正する。このために補正に必要な値をEEPROM19に書き込む。
(もっと読む)
誘導電動機制御装置及び誘導電動機制御方法
【課題】より安定な起動を実現するための、あるいは運転中に外乱が加わっても誘導電動機を安定に動作するよう制御するための誘導電動機制御装置等を提供する。
【解決手段】MERS100u,100v及び100wは、交流電源VSが発生する電圧の位相を値θsetだけ変動させたものに相当する電圧を生成して、この電圧と交流電源が発生する電圧との和に相当する電圧を誘導電動機Mへと印加する。制御部200は、電流検出部GMが検出した負荷電流が値Isetへと収束して、電圧検出部VMが検出した負荷電圧の基本波成分の実効値が、値Isetからの負荷電流の偏差に基づいて決まる値Vsetへと収束するようにθsetを決定し、一方でこの基本波成分の微分に比例する値と負荷電流に比例する値とをθsetの値にフィードフォワードする、そして、このθsetの値に基づいて各ゲート信号の遷移のタイミングを決定し、各MERSに供給する。
(もっと読む)
冷凍装置および永久磁石同期モータの制御装置
【課題】インダクタンスの同定精度を高めることができ、運転効率の向上を図ることができる冷凍装置および永久磁石同期モータの制御装置を提供する。
【解決手段】ベクトル制御運転中に、インダクタンス設定値L*を同定する同定モードとして、所定時間、回転速度指令値ω*を固定しつつ、第1のd軸電流指令値Idc*を所定の設定値Idc_atに固定する同定モード制御手段21と、同定モードの場合における第2のd軸電流指令値Idc**と第1のd軸電流指令値Idc*との差分を積分して平均値を演算し、これに基づいて補正量ΔL*を演算し、補正量ΔL*を加算したインダクタンス設定値L*を電圧指令演算手段45の演算に用いるようにしたインダクタンス同定手段(23〜26)とを有し、同定モード制御手段21は、電流検出手段243で検出された電流Ishが、予め設定された異なる複数の所定値Ish1,Ish2に達した場合、同定モードを実行する。
(もっと読む)
永久磁石同期電動機の駆動装置
【課題】永久磁石同期電動機が脱調により停止した時点で脱調を確実に検出する機能を備えた永久磁石同期電動機の駆動装置を提供する。
【解決手段】永久磁石同期電動機30をインバータ20により駆動するための駆動装置であって、インバータ20の直流電流に基づいて電動機30の脱調を検出するようにした永久磁石同期電動機の駆動装置において、インバータ20の直流電流の振動成分を抽出するフィルタ51と、このフィルタ51により抽出した振動成分の振幅を演算する振動成分振幅演算器54と、この演算器54により演算した振幅が所定の基準値よりも小さくなったときに電動機30が脱調状態にあることを検出する脱調検出手段52Aと、を備える。
(もっと読む)
交流モーター起動電流制御
【課題】顧客からの要望に迅速に対応することが可能な回転制御装置を提供する。
【解決手段】始動器60は、誘導電動機への出力の運転パターンが8つ格納されたメモリ部63と、8つの運転パターンから選択された一の運転パターンに沿って始動から停止まで、誘導電動機への出力を調整する運転制御部64とを備えている。この始動器60は、運転制御部64が、操作パネル62からの入力により選択された運転パターンに基づいて誘導電動機への出力を調整するので、容易に運転パターンの選択が可能である。
(もっと読む)
1 - 10 / 64
[ Back to top ]