
国際特許分類[H02P6/20]の内容
電気 (1,674,590) | 電力の発電,変換,配電 (135,566) | 電動機,発電機,回転変換機の制御または調整;変圧器,リアクトルまたはチョークコイルの制御 (18,002) | 回転子の位置に依存する電子整流子を有する同期電動機または他の電動機の制御装置;それに用いる電子整流子 (4,020) | 起動装置 (164)
国際特許分類[H02P6/20]に分類される特許
1 - 10 / 164
モータ制御装置
Notice: Undefined index: from_cache in /mnt/www/gzt_ipc_list.php on line 285
始動発電機の制御装置
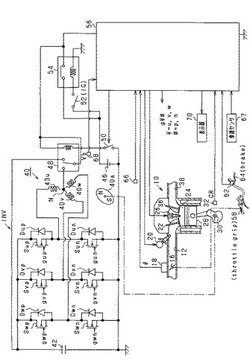
【課題】エンジン10の始動に際しての初期回転の付与手段として発電機(始動発電機40)を併用するに際し、始動発電機40によって生成可能なトルクが小さいために、エンジン10の始動性等が低下すること。
【解決手段】リレー48は、バッテリ46の正極端子を、インバータINVの正極側入力端子と始動発電機40の中性点Nとのいずれかに選択的に接続する。エンジン10の始動に際しては、バッテリ46の正極を中性点Nに接続してインバータINVの入力電圧を昇圧し、インバータINVの入力電圧がバッテリ46の端子電圧Vbであるときよりも生成可能なトルクを増大させる。これにより、始動性を向上させたり、燃料カット制御からの復帰回転速度を低下させて燃費を改善したりすることができる。
(もっと読む)
ブラシレスモータを始動させる方法

【課題】ロータ位置センサの位置の公差に厳しい精度が要求されない、ブラシレスモータの始動方法を提供する。
【解決手段】本発明は、ブラシレスモータを始動させる方法に関する。ブラシレスモータ(1)は、ロータ(2)と、少なくとも1つの相巻線(4)を有するステータ(3)と、ロータ位置センサ(5)を有する。上記方法は、巻線(4)を励起させ、ロータ位置センサ(5)が出力した信号を感知することを含む。信号のエッジを第1期間の間に感知した場合には、エッジに応答して、巻線(4)を整流する。信号のエッジを第1期間の間に感知しない場合には、第1期間の終了時に巻線(4)を整流し、信号を感知し、第2期間の間に感知した信号の2つのエッジのうちの第2のエッジに応答して巻線(4)を整流する。
(もっと読む)
ブラシレスモータの駆動装置及び制御方法、ブラシレスファンモータの駆動装置及び制御方法
【課題】精度良くロータ停止位置を検出できるようにする。
【解決手段】ブラシレスモータのロータ停止位置を検出する際に、位置信号発生手段が、複数相の前記コイルに流す電流のあらかじめ定められた複数の通電パターンを指令する信号を発生させる。カウンタが、複数の前記通電パターンを指令する信号が出力されることで計数を開始する。制御装置は、複数の通電パターンのうち、第1の通電パターンによる通電を指令し、第1の通電パターンの通電を指令する信号を出力してから、カウンタから所定の時間が経過した信号を受け取ったら、続く第2の通電パターンによる通電を指令する信号を出力すると共に、カウンタのカウント値を初期化する。
(もっと読む)
モータ駆動装置及びモータの駆動制御方法
【課題】安価な回路構成で一般的な制御方法による起動を行うとともに、エラー発生時には適切なリカバリー動作を実現する。
【解決手段】モータの駆動開始時には、第1の駆動手段によってモータを駆動した後、第2の駆動手段によってモータを駆動するように、第1の駆動手段と第2の駆動手段とを切り替える制御手段と、を有し、第1の駆動手段は、所定の駆動周波数でオープンループ制御をしている際に、判定手段が検出器からの出力が所定の範囲外であると判定した場合、所定の駆動周波数よりも低い駆動周波数でモータを駆動し、第2の駆動手段は、所定の加速度でフィードバック制御をしている際に、判定手段が検出器からの出力が所定の範囲外であると判定した場合、所定の加速度よりも低い加速度でモータを駆動する。
(もっと読む)
圧縮機モータ制御システム
【課題】起動の精度を向上させることが可能な圧縮機モータ制御システムを提供する。
【解決手段】圧縮機モータ制御システムは、多相モータを有する圧縮機と、多相交流電圧により前記多相モータを制御する制御装置とを含む。制御装置は、多相モータの起動の失敗の有無を検知し、多相モータの起動の失敗を検知した場合には、次に起動する際の電圧をある範囲内で大小交互に変化させる。
(もっと読む)
モータ駆動装置、それを用いたファン制御装置およびヒートポンプ装置
【課題】モータが運転停止後も慣性によって回転している状態から再起動する場合に、インバータへの過電圧や過電流などの異常を発生させずにモータを起動させることができるモータ駆動装置を提供する。
【解決手段】モータ駆動装置20では、マイクロコンピュータ30は、室内ファン15を駆動するファンモータ51を停止させる際、ファンモータ51の回転数を所定回転数まで低下させた後にインバータ25を停止する。ファンモータ51はブラシレスDCモータであって、起動後はロータ位置センサレス制御によって駆動される。ファンモータ51の回転数を所定回転数まで低下させた後にインバータ25を停止することによって、モータを再起動させるときの回転数は所定回転数以下となっている。
(もっと読む)
モータ駆動制御装置及び画像形成装置
【課題】素早くかつ安定にモータを起動することができるモータ駆動制御装置を提供する。
【解決手段】モータ10を停止状態から起動するときは第1の駆動方式である矩形波駆動により回転駆動し、回転中は矩形波駆動または第2の駆動方式である正弦波駆動を切り替えて回転駆動する。これにより、回転位置が正確に得られない起動時は分解能の低い回転位置情報だけでも高トルクを発生可能な駆動方式でモータを駆動し、起動して高分解能の回転位置が得られるようになってから、正弦波駆動に駆動方式を切り替えることができる。そのため、素早くかつ安定にモータを起動することができる。
(もっと読む)
モータ制御装置
【課題】モータを素早く起動することが可能なモータ制御装置を提供する。
【解決手段】モータ制御装置100は、3相モータ10に供給する電圧で規定された制御条件、又は、3相モータ10に供給する電圧及び3相モータ10を制御するPWM信号の周波数の関係で規定された制御条件の少なくともいずれか一方が記憶されてある制御条件記憶部3と、3相モータ10を動力源とするポンプ30で流通させる粘性流体の温度に基づいて、制御条件記憶部3から制御条件を抽出する制御条件抽出部2と、3相モータ10の起動時に、抽出された制御条件に基づくPWM信号でインバータ11が有するトランジスタQ1−Q6を制御するPWM制御部1と、を備える。
(もっと読む)
モータ制御装置
【課題】3相モータをスムーズに且つ素早く起動することが可能なモータ制御装置を提供する。
【解決手段】モータ制御装置100は、動作命令及び停止命令に基づいてインバータが有するスイッチング素子に通電して3相モータ7の回転を制御する通電制御部50と、停止命令に基づき、次の動作命令とは無関係に通電制御部50に対して3相モータ7が有する3つの端子のうち予め設定された2つの端子間への通電及び当該通電の停止を指示する通電指示部10と、を備える。
(もっと読む)
1 - 10 / 164
[ Back to top ]