
画像形成装置及び像担持体ユニット
【課題】像担持体を駆動するモータの出力軸のねじり共振モードの影響を抑制して回転数を検出することができ、モータの回転速度制御を広い周波数帯域で高精度に行い、高品質の画像形成が可能となる画像形成装置を提供する。
【解決手段】像担持体70と、前記像担持体に結合して回転駆動させる出力軸が形成されたモータ101と、を備えた像担持体ユニットを1つ以上有する画像形成装置であって、前記モータの出力軸には、前記出力軸の回転速度を検出する回転速度検出手段361が設けられ、前記回転速度検出手段が、前記モータの出力軸261のねじり共振モードの節近傍に配置されている。
【解決手段】像担持体70と、前記像担持体に結合して回転駆動させる出力軸が形成されたモータ101と、を備えた像担持体ユニットを1つ以上有する画像形成装置であって、前記モータの出力軸には、前記出力軸の回転速度を検出する回転速度検出手段361が設けられ、前記回転速度検出手段が、前記モータの出力軸261のねじり共振モードの節近傍に配置されている。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、モータによって所定の回転速度で回転される像担持体を備えた画像形成装置及び像担持体ユニットに関する。
【背景技術】
【0002】
カラー複写機やカラープリンタ等の画像形成装置は4色(イエロー、マゼンタ、シアン、ブラック)の像担持体(感光ドラム)をそれぞれ備えており、これらの像担持体はモータによって回転される。像担持体を回転駆動するモータには、画像に悪影響を与える原因となる回転ムラを生じないことが望まれている。
このため、従来においてはモータの出力軸は各像担持体に一体回転可能に直結された一体軸とし、該出力軸に回転速度を検出するエンコーダを設け、該エンコーダの出力信号に基づいて像担持体の回転速度を制御することが行われている(特許文献1参照)。
エンコーダは、回転角や回転数、位置等を検出することにより結果的に回転速度を検出するための回転速度検出手段である。具体的なエンコーダとしては、例えば周方向に等間隔で配置された多数のスリットからなる光学パターンが形成されたコードホイール等の被検出部材を出力軸に同軸的に取り付け、該コードホイールを挟んで発光素子と受光素子からなる回転センサを配置した光学式のものが用いられる。
【0003】
上記従来の感光ドラムをカラー複写機に適用した例について、図8を用いて説明する。図9(a)は図8における各感光ドラムユニットの主要断面である。
図8に示すように、カラー複写機はそれぞれイエロー、マゼンタ、シアン、ブラックに対応した4つの感光ドラム70、71、72、73を備えている。
各感光ドラム70、71、72、73は軸心回りに回転することで、それぞれ形成された各色に対応したトナー像を転写体に転写するようになっている。
各感光ドラム70、71、72、73には、それぞれ回転駆動手段として振動波モータ10が接続されている。
具体的には図9(a)に示すように、各振動波モータ10から延出した出力軸26が一体軸となって各感光ドラム70、71、72、73に一体回転可能に直結されている。
なお、詳細な説明は省略するが、各感光ドラム70、71、72、73は出力軸26と結合部材50および51により軸方向に結合され、さらに結合部材50により回転方向に結合されている。
したがって、各感光ドラム70、71、72、73の慣性モーメントが出力軸26に対して負荷される位置は、結合部材50の位置となる。
また、各振動波モータ10は、それぞれモータハウジング12がカラー複写機の筐体74に固定されている。
【0004】
つぎに、図9(a)に示すモータ周辺部の拡大断面図である図9(b)を用いて、駆動モータ部の構造を説明する。
振動波モータ10は、ステンレス等の弾性体22の一方の面に圧電素子21が接着等により接合されたステータSTがモータハウジング12にビス等で固定されている。そして、ステンレス等の弾性体からなるロータ23が防振ゴム24を介して加圧バネ25によりステータSTに押圧されている。
加圧バネ25はディスク28に固着されており、モータハウジング12に装着された2つのラジアルベアリングBA、BBにより回転自在に軸支された出力軸26に圧入固定することにより、ロータ23をステータSTに加圧接触させている。
そのときの加圧反力はカラー24とラジアルベアリングBBの内輪で受けている。そして、ディスク28が出力軸26に一体的に結合されることにより、ロータの回転が出力軸26に伝達される。
なお、ステータSTとロータ23の接触部は、耐摩耗性を上げるため焼入れや窒化処理等を施している。
出力軸26にはコードホイール35が同軸的に取り付けられ、発光素子と受光素子からなる回転センサ36がコードホイール35を挟んで配置されるようにモータケース13に固定されている。
回転センサ36はコードホイール35が出力軸26に対して偏心したときに生じる1回転に1周期の回転誤差成分をキャンセルするために2つを対向した位置に設けて、両者の信号の平均値を用いて回転数を算出している。
【先行技術文献】
【特許文献】
【0005】
【特許文献1】特開2005−168280号公報
【発明の概要】
【発明が解決しようとする課題】
【0006】
しかしながら、従来の像担持体を駆動するモータの回転速度の制御を行うものにおいては、つぎに説明するような課題を有している。
図9(a)に示す感光ドラムユニットの伝達特性を図10(a)に示す。
この図は、振動波モータの入力電圧に外乱として駆動周波数と異なる周波数の電圧を重畳させたときの、回転センサの出力のボード線図であり、上図はゲイン(入出力の比)、下図は位相差の周波数特性を表す。
図10(a)から明らかなように、500Hz付近(図中矢印)のところでノッチ特性がある。これはつぎのような理由による。
すなわち、振動波モータ10および感光ドラム70(71、72、73)をマス(重り)とした出力軸26のねじり振動の共振がその周波数で起こる(図9(a)の矢印)。
そのため、回転センサ36が振動波モータ10自身の回転角に加えて、その振動によるねじれ角変位も検出してしまっているためである。
【0007】
図10(b)に、出力軸26のねじり共振モードの角変位分布を模式的に表す。
横軸は出力軸26の位置、縦軸はねじれ角を示し、出力軸26は2つの実線60の間を往復するようなねじり振動をする。
回転センサ36は図10(b)の左端部付近のねじり共振モードのねじれ角変位が大きい位置に配置されているため、ねじり共振が起きると振動波モータ10の回転数としてねじり振動成分を多く含んだ形で検出される。
図10(a)のノッチ特性は、このようなねじり振動モードの共振周波数が500Hz付近に存在することによって現れていて、制御帯域を広くできない原因となっている。
特に、図10(a)の場合は、500Hz付近でゲインが落ち込んでいることから、ねじり共振による角変位が振動波モータの出力の応答に対して逆位相になっていると考えられ、回転ムラのねじり振動の成分を抑えようとすると逆に大きくなってしまうことになる。
【0008】
制御帯域を広くするには、出力軸26を太くしたり、感光ドラム70(71、72、73)の慣性モーメントを小さくして、このねじり振動の共振周波数を高くすればよいが、装置側の制約で簡単にはできないのが現状である。
なお、感光ドラム70(71、72、73)は出力軸26と結合部材50により軸方向および回転方向に結合され、結合部材51は軸方向のみ結合されている。そのため、感光ドラム70(71、72、73)の回転角は結合部材50の位置における出力軸26の回転角が反映される。
すなわち、感光ドラム70(71、72、73)は、図10(b)の破線61のような均一な角変位になる。
【0009】
本発明は、上記課題に鑑み、像担持体を駆動するモータの出力軸のねじり共振モードの影響を抑制して回転速度を検出することができ、
モータの回転速度制御を広い周波数帯域で高精度に行い、高品質の画像形成が可能となる画像形成装置及び像担持体ユニットの提供を目的とする。
【課題を解決するための手段】
【0010】
本発明の画像形成装置は、像担持体と、前記像担持体に結合して回転駆動させる出力軸が形成されたモータと、を備えた像担持体ユニットを1つ以上有する画像形成装置であって、
前記モータの出力軸には、前記出力軸の回転速度を検出する回転速度検出手段が設けられ、
前記回転速度検出手段が、前記モータの出力軸のねじり共振モードの節近傍に配置されていることを特徴とする。
また、本発明の像担持体ユニットは、像担持体と、前記像担持体に結合して回転駆動させる出力軸が形成されたモータと、を備えた像担持体ユニットであって、
前記モータの出力軸には、前記出力軸の回転速度を検出する回転速度検出手段が設けられ、
前記回転速度検出手段が、前記モータの出力軸のねじり共振モードの節近傍に配置されていることを特徴とする。
【発明の効果】
【0011】
本発明によれば、像担持体を駆動するモータの出力軸のねじり共振モードの影響を抑制して回転速度を検出することができ、
モータの回転速度制御を広い周波数帯域で高精度に行い、高品質の画像形成が可能となる画像形成装置及び像担持体ユニットを実現することができる。
【図面の簡単な説明】
【0012】
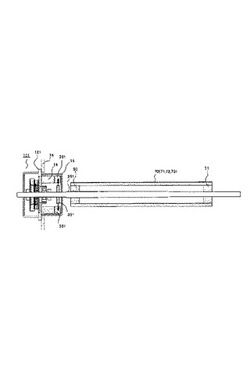
【図1】本発明の実施例1における感光ドラムユニットの主要断面図。
【図2】図1に示すモータ出力軸のねじり共振モードのねじれ角変位分布を模式的に表す図。
【図3】図1に示す感光ドラムユニットの伝達特性を示すボード線図。
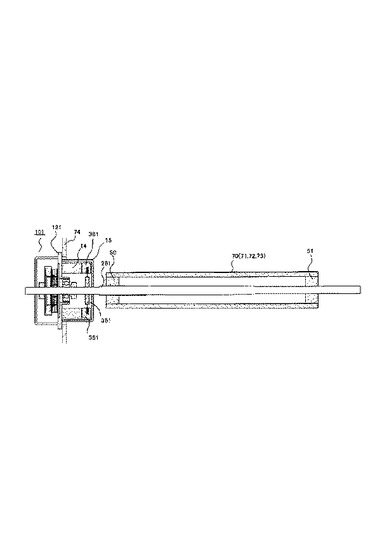
【図4】本発明の実施例2における感光ドラムユニットの主要断面図。
【図5】図4に示すモータ出力軸のねじり共振モードのねじれ角変位分布を模式的に表す図。
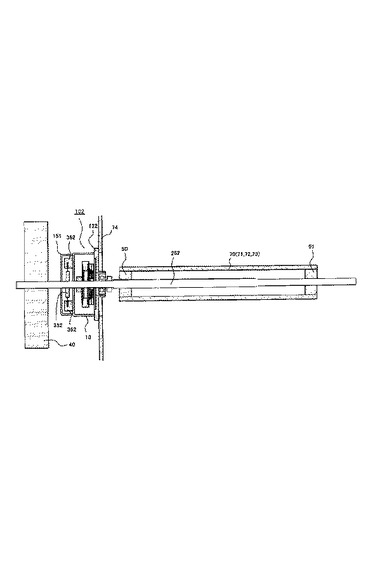
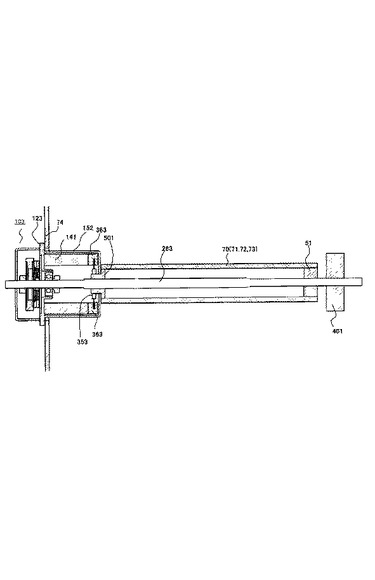
【図6】本発明の実施例3における感光ドラムユニットの主要断面図。
【図7】図6に示すモータ出力軸のねじり共振モードのねじれ角変位分布を模式的に表す図。
【図8】従来例の感光ドラムユニットをカラー複写機に適用した例を示す概略斜視図。
【図9】従来例を説明する図であり、(a)は図8における各感光ドラムユニットの主要断面図、(b)は上記(a)に示すモータ周辺部の拡大断面図。
【図10】従来例を説明する図であり、(a)は図9(a)に示す感光ドラムユニットの伝達特性を示すボード線図、(b)は図9(a)に示すモータ出力軸のねじり共振モードのねじれ角変位分布を模式的に表す図。
【発明を実施するための形態】
【0013】
本発明を実施するための形態を、以下の実施例により説明する。
【実施例】
【0014】
[実施例1]
実施例1として、本発明を適用した像担持体と、前記像担持体を一体的に結合して回転駆動させる出力軸が形成されたモータと、を備えた像担持体ユニットを1つ以上有する(つまり1つ又は複数有する)画像形成装置の構成例について、図1を用いて説明する。
本実施例の像担持体ユニット(感光ドラムユニット)は、図1に示すように、感光ドラム70(71、72、73)には回転駆動手段として振動波モータ101が接続されている。
そして、振動波モータ101から延出した出力軸261が一体軸となって感光ドラム70(71、72、73)に一体回転可能に直結されている。
感光ドラム70(71、72、73)は出力軸261と結合部材50および51により軸方向に結合され、さらに結合部材50により回転方向に結合されている。なお、振動波モータ101のモータハウジング121はカラー複写機の筐体74に固定されている。
【0015】
出力軸261には、出力軸261の回転速度を検出する回転速度検出手段が設けられている。
この回転速度検出手段は、被検出部材であるコードホイール351と、回転センサ361と、を備えたエンコーダであり、回転角や回転数、位置等を検出することにより結果的に回転速度を検出するための手段である。
具体的には、コードホイール351が振動波モータ101と感光ドラム70(71、72、73)の間に同軸的に取り付けられる。
そして、発光素子と受光素子からなる対向する2つの回転センサ361が、コードホイール351を挟んで配置されるように台座14を介してモータハウジング121に固定され、これらにより回転速度検出手段が構成される。
振動波モータ101は回転センサ361の出力信号を用いて回転速度が一定となるように制御されている。
なお、カラー複写機内部、特に感光ドラム近傍にはトナーが舞っていて回転速度検出手段の光学性能が劣化する恐れがあるため、外部からの異物の侵入を防ぐカバー部材によって覆われるように構成することができる。
例えば、コードホイール351および回転センサ361の両部品を覆うように、エンコーダカバー15をモータハウジング121に取り付けるようにする。
【0016】
図2は、図1に示す感光ドラムユニットの出力軸261のねじり共振モードの角変位分布を模式的に表した図である。
従来例の図10(b)と同様に、出力軸261は2つの実線60の間を往復するようなねじり振動をする。
ただし、本実施例ではコードホイール351はねじれ共振モードの角変位がゼロ、すなわちねじれ共振モードの節近傍に配置されているため、回転センサ361の出力信号にはねじり共振の成分は含まれない。本発明において、ねじれ共振モードの節近傍とは、厳密なねじれ共振モードの節位置だけでなく、組み立て精度の範囲内において実質的にねじれ共振モードの節とみなせる位置を含む。
図3はこのような系の伝達特性を示すボード線図であり、上図はゲイン(入出力の比)、下図は位相差の周波数特性を表す。
従来例の図10(a)と比較すると、500Hz付近のノッチ特性がほとんどなくなっていることがわかる(図中矢印)。
したがって、ねじり共振によって制御ゲインを大きくできないということがないため、広い制御帯域が得られる。
すなわち、ねじり共振に起因した回転ムラ成分を検出しないことで制御余裕が増えて制御ゲインを大きくでき精度が高められる。
なお、この発明はねじり共振に起因した回転ムラ成分を制御により除去するというものではない。
【0017】
[実施例2]
実施例2として、調整用マスを有する像担持体ユニット(感光ドラムユニット)の構成例について、図4を用いて説明する。実施例1と共通する部分の説明は省略する。
本実施例の感光ドラムユニットは、図4に示すように、感光ドラム70(71、72、73)には回転駆動手段として振動波モータ102が接続されている。
そして、振動波モータ102から延出した出力軸262が一体軸となって感光ドラム70(71、72、73)に一体回転可能に直結されている。
感光ドラム70(71、72、73)は出力軸262と結合部材50および51により軸方向に結合され、さらに結合部材50により回転方向に結合されている。
振動波モータ102のモータハウジング122はカラー複写機の筐体74に固定されている。
【0018】
出力軸262には、従来例と同様にコードホイール352が同軸的に取り付けられ、対向する2つの回転センサ362がモータケース13に固定されている。振動波モータ102は回転センサ362の出力信号を用いて回転速度が一定となるように制御されている。
また、出力軸には、上記モータを挟んで上記像担持体が出力軸と結合されている側と反対側に調整用マス(重り)40が設けられ、上記モータの出力軸のねじり共振モードの節の位置が、上記モータ102と上記調整用マス40の間に設定されるように構成される。具体的には、振動波モータ102に対して感光ドラム70(71、72、73)と反対側に調整用マス40が取り付けられ、モータの出力軸のねじり共振モードの節の位置が、上記モータと上記調整用マスの間に設定される。
そして、コードホイール352および回転センサ362が振動波モータ102と調整用マス40の間であり、ねじれ共振モードの節近傍になるように配置される。
なお、本実施例ではエンコーダカバー151がコードホイール352および回転センサ362を覆うようにモータケース13に取り付けられているが、両部品は感光ドラム70(71、72、73)から離れていてトナーの悪影響が少ないため、必須ではない。
【0019】
図5は、図4に示す感光ドラムユニットの出力軸262のねじり共振モードの角変位分布を模式的に表した図である。
出力軸262は2つの実線601の間を往復するようにねじり振動する(感光ドラム70(71、72、73)の回転角は破線611)。
ただし、本実施例では調整用マス40を設けることによりねじり共振モードの節の位置が調整用マス40に向かって移動し、ちょうどコードホイール352付近に位置している。
そのため、回転センサ362の出力信号にはねじり共振の成分は含まれず、その共振周波数帯域でも制御ゲインを大きくすることができる。
【0020】
[実施例3]
実施例3として、実施例2とは調整用マスを設ける位置が異なる像担持体ユニット(感光ドラムユニット)の構成例について、図6を用いて説明する。実施例1、2と共通する部分の説明は省略する。
本実施例の感光ドラムユニットは、図6に示すように、感光ドラム70(71、72、73)には回転駆動手段として振動波モータ103が接続されている。
そして、振動波モータ103から延出した出力軸263が一体軸となって像担持体70(71、72、73)に一体回転可能に直結されている。
感光ドラム70(71、72、73)は出力軸263と結合部材501および51により軸方向に結合され、さらに結合部材501により回転方向に結合されている。振動波モータ103のモータハウジング123はカラー複写機の筐体74に固定されている。
本実施例では結合部材501を介してコードホイール353が出力軸263に同軸的に取り付けられ、対向する2つの回転センサ363が台座141を介してモータハウジング123に固定される。
振動波モータ103は回転センサ363の出力信号を用いて回転速度が一定となるように制御されている。
また、出力軸には、前記像担持体が出力軸と回転方向に結合されている位置(つまり結合部材501の位置)を挟んで上記モータ103と反対側に調整用マスが設けられる。そして、上記モータの出力軸のねじり共振モードの節の位置が、上記像担持体における上記出力軸との結合位置近傍(つまり結合部材501の位置近傍)に設定されるように構成される。
具体的には、出力軸263には、感光ドラム70(71、72、73)に対して振動波モータ側103と反対側に調整用マス401が取り付けられ、上記モータの出力軸のねじり共振モードの節の位置が、上記像担持体における前記出力軸との結合部近傍に設定される。
なお、本実施例では、コードホイール353および回転センサ363は感光ドラム70(71、72、73)に近接しているため、両部品を覆うようにエンコーダカバー152をモータハウジング123に取り付けている。
【0021】
図7は、図6に示す感光ドラムユニットの出力軸263のねじり共振モードの角変位分布を模式的に表した図である。
出力軸263は2つの実線602の間を往復するようにねじり振動する。ただし、本実施例では調整用マス401を設けることによりねじり共振モードの節の位置が調整用マス401に向かって移動し、ちょうどコードホイール353付近に位置している。
そのため、回転センサ363の出力信号にはねじり共振の成分は含まれず、その共振周波数帯域で制御ゲインを大きくすることができる。
また、本実施例においては、コードホイール353だけでなく結合部材501もねじり共振モードの節の位置にほぼ一致しているため、感光ドラム70(71、72、73)にねじり共振に起因した回転ムラはほとんど発生しない(図7の破線612)。
【0022】
以上に説明したように、上記各実施例の構成によれば、モータ出力軸のねじり共振モードの影響を受けることなくモータの回転数を検出することができ、ねじり振動モードの共振周波数より高い周波数帯域まで制御可能となる。
また、以上の各実施例の説明では、振動波モータは応答性に優れ制御帯域を広くとれる特長を持ち本発明の効果が特に顕著に表れることから駆動用モータとしてこのような振動波モータを用いた例について説明した。
しかし、本発明はこのような構成に限定されるものではなく、例えば、電磁モータを用いた感光ドラムユニットにおいても適用することが可能である。
【符号の説明】
【0023】
14:回転センサ台座
15:エンコーダカバー
50:結合部材
60:出力軸のねじれ角振幅
61:感光ドラムのねじれ角振幅
70(71、72、73):感光ドラム
74:カラー複写機の筐体
101:振動波モータ
121:モータハウジング
261:出力軸
351:コードホイール
361:回転センサ
【技術分野】
【0001】
本発明は、モータによって所定の回転速度で回転される像担持体を備えた画像形成装置及び像担持体ユニットに関する。
【背景技術】
【0002】
カラー複写機やカラープリンタ等の画像形成装置は4色(イエロー、マゼンタ、シアン、ブラック)の像担持体(感光ドラム)をそれぞれ備えており、これらの像担持体はモータによって回転される。像担持体を回転駆動するモータには、画像に悪影響を与える原因となる回転ムラを生じないことが望まれている。
このため、従来においてはモータの出力軸は各像担持体に一体回転可能に直結された一体軸とし、該出力軸に回転速度を検出するエンコーダを設け、該エンコーダの出力信号に基づいて像担持体の回転速度を制御することが行われている(特許文献1参照)。
エンコーダは、回転角や回転数、位置等を検出することにより結果的に回転速度を検出するための回転速度検出手段である。具体的なエンコーダとしては、例えば周方向に等間隔で配置された多数のスリットからなる光学パターンが形成されたコードホイール等の被検出部材を出力軸に同軸的に取り付け、該コードホイールを挟んで発光素子と受光素子からなる回転センサを配置した光学式のものが用いられる。
【0003】
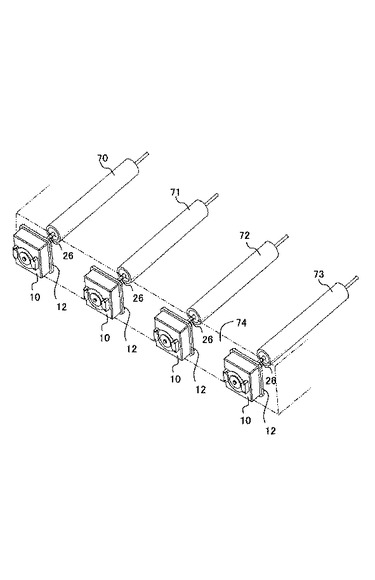
上記従来の感光ドラムをカラー複写機に適用した例について、図8を用いて説明する。図9(a)は図8における各感光ドラムユニットの主要断面である。
図8に示すように、カラー複写機はそれぞれイエロー、マゼンタ、シアン、ブラックに対応した4つの感光ドラム70、71、72、73を備えている。
各感光ドラム70、71、72、73は軸心回りに回転することで、それぞれ形成された各色に対応したトナー像を転写体に転写するようになっている。
各感光ドラム70、71、72、73には、それぞれ回転駆動手段として振動波モータ10が接続されている。
具体的には図9(a)に示すように、各振動波モータ10から延出した出力軸26が一体軸となって各感光ドラム70、71、72、73に一体回転可能に直結されている。
なお、詳細な説明は省略するが、各感光ドラム70、71、72、73は出力軸26と結合部材50および51により軸方向に結合され、さらに結合部材50により回転方向に結合されている。
したがって、各感光ドラム70、71、72、73の慣性モーメントが出力軸26に対して負荷される位置は、結合部材50の位置となる。
また、各振動波モータ10は、それぞれモータハウジング12がカラー複写機の筐体74に固定されている。
【0004】
つぎに、図9(a)に示すモータ周辺部の拡大断面図である図9(b)を用いて、駆動モータ部の構造を説明する。
振動波モータ10は、ステンレス等の弾性体22の一方の面に圧電素子21が接着等により接合されたステータSTがモータハウジング12にビス等で固定されている。そして、ステンレス等の弾性体からなるロータ23が防振ゴム24を介して加圧バネ25によりステータSTに押圧されている。
加圧バネ25はディスク28に固着されており、モータハウジング12に装着された2つのラジアルベアリングBA、BBにより回転自在に軸支された出力軸26に圧入固定することにより、ロータ23をステータSTに加圧接触させている。
そのときの加圧反力はカラー24とラジアルベアリングBBの内輪で受けている。そして、ディスク28が出力軸26に一体的に結合されることにより、ロータの回転が出力軸26に伝達される。
なお、ステータSTとロータ23の接触部は、耐摩耗性を上げるため焼入れや窒化処理等を施している。
出力軸26にはコードホイール35が同軸的に取り付けられ、発光素子と受光素子からなる回転センサ36がコードホイール35を挟んで配置されるようにモータケース13に固定されている。
回転センサ36はコードホイール35が出力軸26に対して偏心したときに生じる1回転に1周期の回転誤差成分をキャンセルするために2つを対向した位置に設けて、両者の信号の平均値を用いて回転数を算出している。
【先行技術文献】
【特許文献】
【0005】
【特許文献1】特開2005−168280号公報
【発明の概要】
【発明が解決しようとする課題】
【0006】
しかしながら、従来の像担持体を駆動するモータの回転速度の制御を行うものにおいては、つぎに説明するような課題を有している。
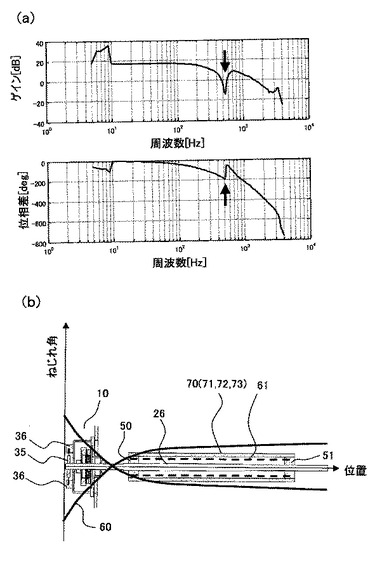
図9(a)に示す感光ドラムユニットの伝達特性を図10(a)に示す。
この図は、振動波モータの入力電圧に外乱として駆動周波数と異なる周波数の電圧を重畳させたときの、回転センサの出力のボード線図であり、上図はゲイン(入出力の比)、下図は位相差の周波数特性を表す。
図10(a)から明らかなように、500Hz付近(図中矢印)のところでノッチ特性がある。これはつぎのような理由による。
すなわち、振動波モータ10および感光ドラム70(71、72、73)をマス(重り)とした出力軸26のねじり振動の共振がその周波数で起こる(図9(a)の矢印)。
そのため、回転センサ36が振動波モータ10自身の回転角に加えて、その振動によるねじれ角変位も検出してしまっているためである。
【0007】
図10(b)に、出力軸26のねじり共振モードの角変位分布を模式的に表す。
横軸は出力軸26の位置、縦軸はねじれ角を示し、出力軸26は2つの実線60の間を往復するようなねじり振動をする。
回転センサ36は図10(b)の左端部付近のねじり共振モードのねじれ角変位が大きい位置に配置されているため、ねじり共振が起きると振動波モータ10の回転数としてねじり振動成分を多く含んだ形で検出される。
図10(a)のノッチ特性は、このようなねじり振動モードの共振周波数が500Hz付近に存在することによって現れていて、制御帯域を広くできない原因となっている。
特に、図10(a)の場合は、500Hz付近でゲインが落ち込んでいることから、ねじり共振による角変位が振動波モータの出力の応答に対して逆位相になっていると考えられ、回転ムラのねじり振動の成分を抑えようとすると逆に大きくなってしまうことになる。
【0008】
制御帯域を広くするには、出力軸26を太くしたり、感光ドラム70(71、72、73)の慣性モーメントを小さくして、このねじり振動の共振周波数を高くすればよいが、装置側の制約で簡単にはできないのが現状である。
なお、感光ドラム70(71、72、73)は出力軸26と結合部材50により軸方向および回転方向に結合され、結合部材51は軸方向のみ結合されている。そのため、感光ドラム70(71、72、73)の回転角は結合部材50の位置における出力軸26の回転角が反映される。
すなわち、感光ドラム70(71、72、73)は、図10(b)の破線61のような均一な角変位になる。
【0009】
本発明は、上記課題に鑑み、像担持体を駆動するモータの出力軸のねじり共振モードの影響を抑制して回転速度を検出することができ、
モータの回転速度制御を広い周波数帯域で高精度に行い、高品質の画像形成が可能となる画像形成装置及び像担持体ユニットの提供を目的とする。
【課題を解決するための手段】
【0010】
本発明の画像形成装置は、像担持体と、前記像担持体に結合して回転駆動させる出力軸が形成されたモータと、を備えた像担持体ユニットを1つ以上有する画像形成装置であって、
前記モータの出力軸には、前記出力軸の回転速度を検出する回転速度検出手段が設けられ、
前記回転速度検出手段が、前記モータの出力軸のねじり共振モードの節近傍に配置されていることを特徴とする。
また、本発明の像担持体ユニットは、像担持体と、前記像担持体に結合して回転駆動させる出力軸が形成されたモータと、を備えた像担持体ユニットであって、
前記モータの出力軸には、前記出力軸の回転速度を検出する回転速度検出手段が設けられ、
前記回転速度検出手段が、前記モータの出力軸のねじり共振モードの節近傍に配置されていることを特徴とする。
【発明の効果】
【0011】
本発明によれば、像担持体を駆動するモータの出力軸のねじり共振モードの影響を抑制して回転速度を検出することができ、
モータの回転速度制御を広い周波数帯域で高精度に行い、高品質の画像形成が可能となる画像形成装置及び像担持体ユニットを実現することができる。
【図面の簡単な説明】
【0012】
【図1】本発明の実施例1における感光ドラムユニットの主要断面図。
【図2】図1に示すモータ出力軸のねじり共振モードのねじれ角変位分布を模式的に表す図。
【図3】図1に示す感光ドラムユニットの伝達特性を示すボード線図。
【図4】本発明の実施例2における感光ドラムユニットの主要断面図。
【図5】図4に示すモータ出力軸のねじり共振モードのねじれ角変位分布を模式的に表す図。
【図6】本発明の実施例3における感光ドラムユニットの主要断面図。
【図7】図6に示すモータ出力軸のねじり共振モードのねじれ角変位分布を模式的に表す図。
【図8】従来例の感光ドラムユニットをカラー複写機に適用した例を示す概略斜視図。
【図9】従来例を説明する図であり、(a)は図8における各感光ドラムユニットの主要断面図、(b)は上記(a)に示すモータ周辺部の拡大断面図。
【図10】従来例を説明する図であり、(a)は図9(a)に示す感光ドラムユニットの伝達特性を示すボード線図、(b)は図9(a)に示すモータ出力軸のねじり共振モードのねじれ角変位分布を模式的に表す図。
【発明を実施するための形態】
【0013】
本発明を実施するための形態を、以下の実施例により説明する。
【実施例】
【0014】
[実施例1]
実施例1として、本発明を適用した像担持体と、前記像担持体を一体的に結合して回転駆動させる出力軸が形成されたモータと、を備えた像担持体ユニットを1つ以上有する(つまり1つ又は複数有する)画像形成装置の構成例について、図1を用いて説明する。
本実施例の像担持体ユニット(感光ドラムユニット)は、図1に示すように、感光ドラム70(71、72、73)には回転駆動手段として振動波モータ101が接続されている。
そして、振動波モータ101から延出した出力軸261が一体軸となって感光ドラム70(71、72、73)に一体回転可能に直結されている。
感光ドラム70(71、72、73)は出力軸261と結合部材50および51により軸方向に結合され、さらに結合部材50により回転方向に結合されている。なお、振動波モータ101のモータハウジング121はカラー複写機の筐体74に固定されている。
【0015】
出力軸261には、出力軸261の回転速度を検出する回転速度検出手段が設けられている。
この回転速度検出手段は、被検出部材であるコードホイール351と、回転センサ361と、を備えたエンコーダであり、回転角や回転数、位置等を検出することにより結果的に回転速度を検出するための手段である。
具体的には、コードホイール351が振動波モータ101と感光ドラム70(71、72、73)の間に同軸的に取り付けられる。
そして、発光素子と受光素子からなる対向する2つの回転センサ361が、コードホイール351を挟んで配置されるように台座14を介してモータハウジング121に固定され、これらにより回転速度検出手段が構成される。
振動波モータ101は回転センサ361の出力信号を用いて回転速度が一定となるように制御されている。
なお、カラー複写機内部、特に感光ドラム近傍にはトナーが舞っていて回転速度検出手段の光学性能が劣化する恐れがあるため、外部からの異物の侵入を防ぐカバー部材によって覆われるように構成することができる。
例えば、コードホイール351および回転センサ361の両部品を覆うように、エンコーダカバー15をモータハウジング121に取り付けるようにする。
【0016】
図2は、図1に示す感光ドラムユニットの出力軸261のねじり共振モードの角変位分布を模式的に表した図である。
従来例の図10(b)と同様に、出力軸261は2つの実線60の間を往復するようなねじり振動をする。
ただし、本実施例ではコードホイール351はねじれ共振モードの角変位がゼロ、すなわちねじれ共振モードの節近傍に配置されているため、回転センサ361の出力信号にはねじり共振の成分は含まれない。本発明において、ねじれ共振モードの節近傍とは、厳密なねじれ共振モードの節位置だけでなく、組み立て精度の範囲内において実質的にねじれ共振モードの節とみなせる位置を含む。
図3はこのような系の伝達特性を示すボード線図であり、上図はゲイン(入出力の比)、下図は位相差の周波数特性を表す。
従来例の図10(a)と比較すると、500Hz付近のノッチ特性がほとんどなくなっていることがわかる(図中矢印)。
したがって、ねじり共振によって制御ゲインを大きくできないということがないため、広い制御帯域が得られる。
すなわち、ねじり共振に起因した回転ムラ成分を検出しないことで制御余裕が増えて制御ゲインを大きくでき精度が高められる。
なお、この発明はねじり共振に起因した回転ムラ成分を制御により除去するというものではない。
【0017】
[実施例2]
実施例2として、調整用マスを有する像担持体ユニット(感光ドラムユニット)の構成例について、図4を用いて説明する。実施例1と共通する部分の説明は省略する。
本実施例の感光ドラムユニットは、図4に示すように、感光ドラム70(71、72、73)には回転駆動手段として振動波モータ102が接続されている。
そして、振動波モータ102から延出した出力軸262が一体軸となって感光ドラム70(71、72、73)に一体回転可能に直結されている。
感光ドラム70(71、72、73)は出力軸262と結合部材50および51により軸方向に結合され、さらに結合部材50により回転方向に結合されている。
振動波モータ102のモータハウジング122はカラー複写機の筐体74に固定されている。
【0018】
出力軸262には、従来例と同様にコードホイール352が同軸的に取り付けられ、対向する2つの回転センサ362がモータケース13に固定されている。振動波モータ102は回転センサ362の出力信号を用いて回転速度が一定となるように制御されている。
また、出力軸には、上記モータを挟んで上記像担持体が出力軸と結合されている側と反対側に調整用マス(重り)40が設けられ、上記モータの出力軸のねじり共振モードの節の位置が、上記モータ102と上記調整用マス40の間に設定されるように構成される。具体的には、振動波モータ102に対して感光ドラム70(71、72、73)と反対側に調整用マス40が取り付けられ、モータの出力軸のねじり共振モードの節の位置が、上記モータと上記調整用マスの間に設定される。
そして、コードホイール352および回転センサ362が振動波モータ102と調整用マス40の間であり、ねじれ共振モードの節近傍になるように配置される。
なお、本実施例ではエンコーダカバー151がコードホイール352および回転センサ362を覆うようにモータケース13に取り付けられているが、両部品は感光ドラム70(71、72、73)から離れていてトナーの悪影響が少ないため、必須ではない。
【0019】
図5は、図4に示す感光ドラムユニットの出力軸262のねじり共振モードの角変位分布を模式的に表した図である。
出力軸262は2つの実線601の間を往復するようにねじり振動する(感光ドラム70(71、72、73)の回転角は破線611)。
ただし、本実施例では調整用マス40を設けることによりねじり共振モードの節の位置が調整用マス40に向かって移動し、ちょうどコードホイール352付近に位置している。
そのため、回転センサ362の出力信号にはねじり共振の成分は含まれず、その共振周波数帯域でも制御ゲインを大きくすることができる。
【0020】
[実施例3]
実施例3として、実施例2とは調整用マスを設ける位置が異なる像担持体ユニット(感光ドラムユニット)の構成例について、図6を用いて説明する。実施例1、2と共通する部分の説明は省略する。
本実施例の感光ドラムユニットは、図6に示すように、感光ドラム70(71、72、73)には回転駆動手段として振動波モータ103が接続されている。
そして、振動波モータ103から延出した出力軸263が一体軸となって像担持体70(71、72、73)に一体回転可能に直結されている。
感光ドラム70(71、72、73)は出力軸263と結合部材501および51により軸方向に結合され、さらに結合部材501により回転方向に結合されている。振動波モータ103のモータハウジング123はカラー複写機の筐体74に固定されている。
本実施例では結合部材501を介してコードホイール353が出力軸263に同軸的に取り付けられ、対向する2つの回転センサ363が台座141を介してモータハウジング123に固定される。
振動波モータ103は回転センサ363の出力信号を用いて回転速度が一定となるように制御されている。
また、出力軸には、前記像担持体が出力軸と回転方向に結合されている位置(つまり結合部材501の位置)を挟んで上記モータ103と反対側に調整用マスが設けられる。そして、上記モータの出力軸のねじり共振モードの節の位置が、上記像担持体における上記出力軸との結合位置近傍(つまり結合部材501の位置近傍)に設定されるように構成される。
具体的には、出力軸263には、感光ドラム70(71、72、73)に対して振動波モータ側103と反対側に調整用マス401が取り付けられ、上記モータの出力軸のねじり共振モードの節の位置が、上記像担持体における前記出力軸との結合部近傍に設定される。
なお、本実施例では、コードホイール353および回転センサ363は感光ドラム70(71、72、73)に近接しているため、両部品を覆うようにエンコーダカバー152をモータハウジング123に取り付けている。
【0021】
図7は、図6に示す感光ドラムユニットの出力軸263のねじり共振モードの角変位分布を模式的に表した図である。
出力軸263は2つの実線602の間を往復するようにねじり振動する。ただし、本実施例では調整用マス401を設けることによりねじり共振モードの節の位置が調整用マス401に向かって移動し、ちょうどコードホイール353付近に位置している。
そのため、回転センサ363の出力信号にはねじり共振の成分は含まれず、その共振周波数帯域で制御ゲインを大きくすることができる。
また、本実施例においては、コードホイール353だけでなく結合部材501もねじり共振モードの節の位置にほぼ一致しているため、感光ドラム70(71、72、73)にねじり共振に起因した回転ムラはほとんど発生しない(図7の破線612)。
【0022】
以上に説明したように、上記各実施例の構成によれば、モータ出力軸のねじり共振モードの影響を受けることなくモータの回転数を検出することができ、ねじり振動モードの共振周波数より高い周波数帯域まで制御可能となる。
また、以上の各実施例の説明では、振動波モータは応答性に優れ制御帯域を広くとれる特長を持ち本発明の効果が特に顕著に表れることから駆動用モータとしてこのような振動波モータを用いた例について説明した。
しかし、本発明はこのような構成に限定されるものではなく、例えば、電磁モータを用いた感光ドラムユニットにおいても適用することが可能である。
【符号の説明】
【0023】
14:回転センサ台座
15:エンコーダカバー
50:結合部材
60:出力軸のねじれ角振幅
61:感光ドラムのねじれ角振幅
70(71、72、73):感光ドラム
74:カラー複写機の筐体
101:振動波モータ
121:モータハウジング
261:出力軸
351:コードホイール
361:回転センサ
【特許請求の範囲】
【請求項1】
像担持体と、前記像担持体に結合して回転駆動させる出力軸が形成されたモータと、を備えた像担持体ユニットを1つ以上有する画像形成装置であって、
前記モータの出力軸には、前記出力軸の回転速度を検出する回転速度検出手段が設けられ、
前記回転速度検出手段が、前記モータの出力軸のねじり共振モードの節近傍に配置されていることを特徴とする画像形成装置。
【請求項2】
前記回転速度検出手段は、被検出部材と、該被検出部材を挟んで発光素子と受光素子からなる回転センサと、を備えたエンコーダで構成されており、前記被検出部材が前記モータの出力軸に一体的に結合され、前記被検出部材が前記モータの出力軸のねじり共振モードの節近傍に配置されていることを特徴とする請求項1に記載の画像形成装置。
【請求項3】
前記モータを挟んで、前記出力軸の前記像担持体が結合されている側と反対側に調整用マスが設けられ、
前記モータの出力軸のねじり共振モードの節の位置が、前記モータと前記調整用マスの間に設定されていることを特徴とする請求項1または請求項2に記載の画像形成装置。
【請求項4】
前記像担持体が前記出力軸と回転方向に結合されている位置を挟んで、前記出力軸の前記モータ側と反対側に調整用マスが設けられ、
前記モータの出力軸のねじり共振モードの節の位置が、前記像担持体における前記出力軸との回転方向に結合されている位置の近傍に設定されていることを特徴とする請求項1または請求項2に記載の画像形成装置。
【請求項5】
前記像担持体が前記出力軸と回転方向に結合されている位置を挟んで、前記出力軸の前記モータ側と反対側に調整用マスが設けられ、
前記モータの出力軸のねじり共振モードの節の位置が、前記像担持体における前記出力軸との結合部近傍に設定されると共に、前記回転速度検出手段は被検出部材と該被検出部材を挟んで発光素子と受光素子からなる回転センサを備えたエンコーダで構成され、
前記像担持体と前記出力軸とは結合部材によって結合され、前記結合部材を介して前記被検出部材が配置されていることを特徴とする請求項1に記載の画像形成装置。
【請求項6】
前記回転速度検出手段は、外部からの異物の侵入を防ぐカバー部材によって覆われていることを特徴とする請求項1から5のいずれか1項に記載の画像形成装置。
【請求項7】
前記モータは、振動波モータであることを特徴とする請求項1から6のいずれか1項に記載の画像形成装置。
【請求項8】
像担持体と、前記像担持体に結合して回転駆動させる出力軸が形成されたモータと、を備えた像担持体ユニットであって、
前記モータの出力軸には、前記出力軸の回転速度を検出する回転速度検出手段が設けられ、
前記回転速度検出手段が、前記モータの出力軸のねじり共振モードの節近傍に配置されていることを特徴とする像担持体ユニット。
【請求項9】
前記回転速度検出手段は、被検出部材と、該被検出部材を挟んで発光素子と受光素子からなる回転センサと、を備えたエンコーダで構成されており、前記被検出部材が前記モータの出力軸に一体的に結合され、前記被検出部材が前記モータの出力軸のねじり共振モードの節近傍に配置されていることを特徴とする請求項8に記載の像担持体ユニット。
【請求項10】
前記モータを挟んで、前記出力軸の前記像担持体が結合されている側と反対側に調整用マスが設けられ、
前記モータの出力軸のねじり共振モードの節の位置が、前記モータと前記調整用マスの間に設定されていることを特徴とする請求項8または請求項9に記載の像担持体ユニット。
【請求項11】
前記像担持体が前記出力軸と回転方向に結合されている位置を挟んで、前記出力軸の前記モータ側と反対側に調整用マスが設けられ、
前記モータの出力軸のねじり共振モードの節の位置が、前記像担持体における前記出力軸との回転方向に結合されている位置近傍に設定されていることを特徴とする請求項8または請求項9に記載の像担持体ユニット。
【請求項12】
前記像担持体が前記出力軸と回転方向に結合されている位置を挟んで、前記出力軸の前記モータ側と反対側に調整用マスが設けられ、
前記モータの出力軸のねじり共振モードの節の位置が、前記像担持体における前記出力軸との結合部近傍に設定されると共に、前記回転速度検出手段は被検出部材と該被検出部材を挟んで発光素子と受光素子からなる回転センサを備えたエンコーダで構成され、
前記像担持体と前記出力軸とは結合部材によって結合され、前記結合部材を介して前記被検出部材が配置されていることを特徴とする請求項8に記載の像担持体ユニット。
【請求項13】
前記回転速度検出手段は、外部からの異物の侵入を防ぐカバー部材によって覆われていることを特徴とする請求項8から12のいずれか1項に記載の像担持体ユニット。
【請求項14】
前記モータは、振動波モータであることを特徴とする請求項8から13のいずれか1項に記載の像担持体ユニット。
【請求項1】
像担持体と、前記像担持体に結合して回転駆動させる出力軸が形成されたモータと、を備えた像担持体ユニットを1つ以上有する画像形成装置であって、
前記モータの出力軸には、前記出力軸の回転速度を検出する回転速度検出手段が設けられ、
前記回転速度検出手段が、前記モータの出力軸のねじり共振モードの節近傍に配置されていることを特徴とする画像形成装置。
【請求項2】
前記回転速度検出手段は、被検出部材と、該被検出部材を挟んで発光素子と受光素子からなる回転センサと、を備えたエンコーダで構成されており、前記被検出部材が前記モータの出力軸に一体的に結合され、前記被検出部材が前記モータの出力軸のねじり共振モードの節近傍に配置されていることを特徴とする請求項1に記載の画像形成装置。
【請求項3】
前記モータを挟んで、前記出力軸の前記像担持体が結合されている側と反対側に調整用マスが設けられ、
前記モータの出力軸のねじり共振モードの節の位置が、前記モータと前記調整用マスの間に設定されていることを特徴とする請求項1または請求項2に記載の画像形成装置。
【請求項4】
前記像担持体が前記出力軸と回転方向に結合されている位置を挟んで、前記出力軸の前記モータ側と反対側に調整用マスが設けられ、
前記モータの出力軸のねじり共振モードの節の位置が、前記像担持体における前記出力軸との回転方向に結合されている位置の近傍に設定されていることを特徴とする請求項1または請求項2に記載の画像形成装置。
【請求項5】
前記像担持体が前記出力軸と回転方向に結合されている位置を挟んで、前記出力軸の前記モータ側と反対側に調整用マスが設けられ、
前記モータの出力軸のねじり共振モードの節の位置が、前記像担持体における前記出力軸との結合部近傍に設定されると共に、前記回転速度検出手段は被検出部材と該被検出部材を挟んで発光素子と受光素子からなる回転センサを備えたエンコーダで構成され、
前記像担持体と前記出力軸とは結合部材によって結合され、前記結合部材を介して前記被検出部材が配置されていることを特徴とする請求項1に記載の画像形成装置。
【請求項6】
前記回転速度検出手段は、外部からの異物の侵入を防ぐカバー部材によって覆われていることを特徴とする請求項1から5のいずれか1項に記載の画像形成装置。
【請求項7】
前記モータは、振動波モータであることを特徴とする請求項1から6のいずれか1項に記載の画像形成装置。
【請求項8】
像担持体と、前記像担持体に結合して回転駆動させる出力軸が形成されたモータと、を備えた像担持体ユニットであって、
前記モータの出力軸には、前記出力軸の回転速度を検出する回転速度検出手段が設けられ、
前記回転速度検出手段が、前記モータの出力軸のねじり共振モードの節近傍に配置されていることを特徴とする像担持体ユニット。
【請求項9】
前記回転速度検出手段は、被検出部材と、該被検出部材を挟んで発光素子と受光素子からなる回転センサと、を備えたエンコーダで構成されており、前記被検出部材が前記モータの出力軸に一体的に結合され、前記被検出部材が前記モータの出力軸のねじり共振モードの節近傍に配置されていることを特徴とする請求項8に記載の像担持体ユニット。
【請求項10】
前記モータを挟んで、前記出力軸の前記像担持体が結合されている側と反対側に調整用マスが設けられ、
前記モータの出力軸のねじり共振モードの節の位置が、前記モータと前記調整用マスの間に設定されていることを特徴とする請求項8または請求項9に記載の像担持体ユニット。
【請求項11】
前記像担持体が前記出力軸と回転方向に結合されている位置を挟んで、前記出力軸の前記モータ側と反対側に調整用マスが設けられ、
前記モータの出力軸のねじり共振モードの節の位置が、前記像担持体における前記出力軸との回転方向に結合されている位置近傍に設定されていることを特徴とする請求項8または請求項9に記載の像担持体ユニット。
【請求項12】
前記像担持体が前記出力軸と回転方向に結合されている位置を挟んで、前記出力軸の前記モータ側と反対側に調整用マスが設けられ、
前記モータの出力軸のねじり共振モードの節の位置が、前記像担持体における前記出力軸との結合部近傍に設定されると共に、前記回転速度検出手段は被検出部材と該被検出部材を挟んで発光素子と受光素子からなる回転センサを備えたエンコーダで構成され、
前記像担持体と前記出力軸とは結合部材によって結合され、前記結合部材を介して前記被検出部材が配置されていることを特徴とする請求項8に記載の像担持体ユニット。
【請求項13】
前記回転速度検出手段は、外部からの異物の侵入を防ぐカバー部材によって覆われていることを特徴とする請求項8から12のいずれか1項に記載の像担持体ユニット。
【請求項14】
前記モータは、振動波モータであることを特徴とする請求項8から13のいずれか1項に記載の像担持体ユニット。
【図1】


【図2】

【図3】

【図4】
【図5】

【図6】
【図7】

【図8】
【図9】

【図10】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【公開番号】特開2012−78648(P2012−78648A)
【公開日】平成24年4月19日(2012.4.19)
【国際特許分類】
【出願番号】特願2010−224929(P2010−224929)
【出願日】平成22年10月4日(2010.10.4)
【出願人】(000001007)キヤノン株式会社 (59,756)
【Fターム(参考)】
【公開日】平成24年4月19日(2012.4.19)
【国際特許分類】
【出願日】平成22年10月4日(2010.10.4)
【出願人】(000001007)キヤノン株式会社 (59,756)
【Fターム(参考)】
[ Back to top ]