
遊技表示装置
【課題】モータ駆動表示器が電源の投入ごとに選択された形象を正面から見える位置に停止する。
【解決手段】制御装置3が電源の投入に伴いモータ駆動表示器1および乱数カウンタ4を駆動し、モータ位置検出器2がモータ駆動表示器1の回転位置の基準となる位置信号を制御装置3に出力すると、制御装置3が駆動している乱数カウンタ4の数値を取得しその数値より選択された形象5を正面から見えるように上記モータ駆動表示器1の駆動を停止するので、遊技表示装置が完成してから1回目の電源の投入の場合、表示体6の形象5として「0」がモータ駆動表示器1の前から見えるようになり、パチンコ遊技機が完成してから2回目の電源の投入の場合、各表示体6の形象5として「1」がモータ駆動表示器1の前から見えるようになる。モータ駆動表示器1の個数は、複数であってもよい。
【解決手段】制御装置3が電源の投入に伴いモータ駆動表示器1および乱数カウンタ4を駆動し、モータ位置検出器2がモータ駆動表示器1の回転位置の基準となる位置信号を制御装置3に出力すると、制御装置3が駆動している乱数カウンタ4の数値を取得しその数値より選択された形象5を正面から見えるように上記モータ駆動表示器1の駆動を停止するので、遊技表示装置が完成してから1回目の電源の投入の場合、表示体6の形象5として「0」がモータ駆動表示器1の前から見えるようになり、パチンコ遊技機が完成してから2回目の電源の投入の場合、各表示体6の形象5として「1」がモータ駆動表示器1の前から見えるようになる。モータ駆動表示器1の個数は、複数であってもよい。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、モータ駆動表示器が電源の投入ごとに選択された形象を正面から見える位置に停止する遊技表示装置に関する。
【背景技術】
【0002】
遊技表示装置には、特許文献1のように、可変表示装置などのモータ駆動表示器が電源投入後に所定の識別情報などの形象を表示するように停止していないときは、即座に、モータ駆動表示器の故障であることを分かるようにしたものが知られている。しかしながら、特許文献1で開示されたものは、電源投入後に停止される形象を電源投入ごとに異なる形象にすることができないという欠点がある。また、特許文献2のように、図柄表示器が電源回路から遅延回路を経由する電源投入後のランダムな遅延時間に基づき表示図柄にランダム性を持たせるようにしたものが知られている。しかしながら、特許文献2で開示されたものは、図柄表示器が電源投入からランダムな遅延時間だけ遅れて駆動するという欠点がある。
【特許文献1】特許第2676196号公報
【特許文献2】特許第2849688号公報
【発明の開示】
【発明が解決しようとする課題】
【0003】
発明が解決しようとする問題点は、特許文献1に記載された発明および特許文献2に記載された発明を組み合わせたとしても、電源投入からランダムな遅延時間の遅れなくモータ駆動表示器を駆動した後に電源投入ごとに異なる形象を遊技者に見せるようにモータ駆動表示器を停止させることができないという点である。
【課題を解決するための手段】
【0004】
本発明に係る遊技表示装置は、モータ駆動表示器、モータ位置検出器、制御装置、乱数カウンタを備えた遊技表示装置において、制御装置が電源の投入に伴いモータ駆動表示器および乱数カウンタを駆動させかつ計時を開始し、モータ位置検出器がモータ駆動表示器の回転位置の基準となる位置信号を制御装置に出力すると、制御装置が上記駆動した乱数カウンタの数値を取得しその数値より選択された形象を正面から見えるように上記モータ駆動表示器の駆動を停止させるか、または、モータ駆動表示器、モータ位置検出器、制御装置、乱数カウンタを備えた遊技表示装置において、制御装置が電源の投入に伴いモータ駆動表示器を駆動させるとともに計時を開始し、モータ位置検出器がモータ駆動表示器の回転位置の基準となる位置信号を制御装置に出力すると、制御装置が乱数カウンタを駆動した後に上記計時した時間が制御装置に設定された規定時間に到達するのに伴い上記駆動した乱数カウンタの数値を取得しその数値より選択された形象を正面から見えるように上記モータ駆動表示器の駆動を停止させるか、または、モータ駆動表示器、モータ位置検出器、主制御装置、副制御装置、乱数カウンタを備えた遊技制御装置において、主制御装置が電源の投入に伴い計時を開始し、副制御装置が電源の投入に伴いモータ駆動表示器を駆動させ、モータ位置検出器がモータ駆動表示器の回転位置の基準となる位置信号を副制御装置に出力すると、副制御装置が乱数カウンタを駆動し、上記主制御装置で計時した時間が主制御装置に設定された規定時間に到達すると副制御装置にコマンドを出力し、そのコマンドの入力に伴い副制御装置が上記駆動した乱数カウンタの数値を取得しその数値より選択された形象を正面から見えるように上記モータ駆動表示器の駆動を停止させることを最も主要な特徴とする。
【発明の効果】
【0005】
本発明に係る遊技表示装置は、モータ駆動表示器の回転位置の基準となる位置信号を利用して形象を正面から見えるようにモータ駆動表示器を停止するので、モータ駆動表示器が電源投入からランダムな遅延時間の遅れなく駆動した後に電源投入ごとに異なる形象を遊技者に見せるようにモータ駆動表示器が停止することができるという利点がある。
【発明を実施するための最良の形態】
【0006】
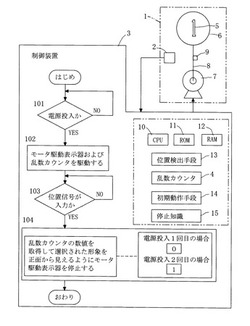
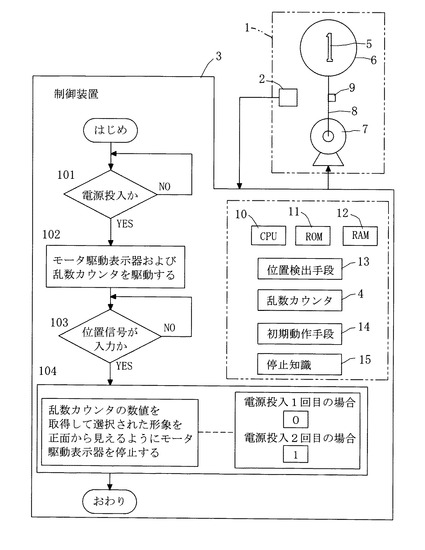
図1は、発明を実施するための第1形態である。図1において、遊技表示装置は、モータ駆動表示器1、モータ位置検出器2、制御装置3、乱数カウンタ4を備える。そして、制御装置3が電源の投入に伴いモータ駆動表示器1および乱数カウンタ4を駆動し、モータ位置検出器2がモータ駆動表示器1の回転位置の基準となる位置信号を制御装置3に出力すると、制御装置3が駆動している乱数カウンタ4の数値を取得しその数値より選択された形象5を正面から見えるように上記モータ駆動表示器1の駆動を停止する。制御装置3は、乱数カウンタ4の数値を取得した後、乱数カウンタ4の駆動を停止する。
【0007】
つまり、モータ駆動表示器1が駆動してからモータ位置検出器2が位置信号を出力するまでの時間、換言するならば、制御装置3がモータ駆動表示器1を駆動してからモータ位置検出器2からの位置信号を検出するまでの時間は、モータ駆動表示器1が駆動を開始する際において、モータ位置検出器2が被検出部9から遠い場合と近い場合とで異なる。このため、上記のように、モータ駆動表示器1の回転位置の基準となる位置信号を利用して形象5を正面から見えるようにモータ駆動表示器1を停止することによって、モータ駆動表示器1が電源投入からランダムな遅延時間の遅れなく駆動した後に電源投入ごとに異なる形象5を遊技者に見せるようにモータ駆動表示器1が停止することができるという利点がある。
【0008】
モータ駆動表示器1は、表示体6をモータ7で回転する構造である。表示体6には、複数の形状の異なる形象5が表示体6の外側から見えるように設けられる。各形象5の異なる形状は不変である。モータ7は、ステップモータにより構成される。表示体6がモータ7で回転された状態において、遊技者がモータ駆動表示器1を正面から見ると、表示体6における複数の形象5が上から下にまたは下から上にまたは左から右にまたは右から左に順に移動して変動するように見える。つまり、モータ駆動表示器1では、表示体6がモータ7で回転すると、複数の形象5が変動表示される。モータ7の動力を表示体6に伝達する回転機構8には、被検出部9が回転機構8と一緒に回転するように設けられる。モータ位置検出器2はモータ駆動表示器1の回転位置の基準となる位置を検出するものであって、モータ駆動表示器1の固定部に設けられ、被検出部9を検出するごとに基準位置信号を制御装置3に出力する。
【0009】
制御装置3は、乱数カウンタ4、CPU10、ROM11、RAM12、位置検出手段13、初期動作手段14、停止知識15を備える。位置検出手段13および初期動作手段14は、制御装置3のCPU10がRAM12を処理データのメモリとして使用しながらROM11に格納されたコンピュータプログラムに従う動作により具現化される。乱数カウンタ4は、最小数値から数値を1ずつカウントアップし、カウントアップした数値が最大数値に到達した後に最小数値に戻る、巡回形のソフトカウンタまたは巡回形のハードカウンタとして構成される。乱数カウンタ4の最小数値は、停止知識15における乱数として設定された最小数値と同じ数値である。乱数カウンタ4の最大数値は、停止知識15における乱数として設定された最大数値と同じ数値である。停止知識15は、制御装置3のROM11に格納され、乱数の数値と初期停止情報との関係を規定したテーブルとして構成されたデータベースである。
【0010】
そして、制御装置3のCPU10は、フローチャートに示すように、電源の投入に伴いCPU10を起動するブート処理に相当するイニシャライズ処理を実行し、当該イニシャライズ処理が終了する(ステップ101がYES参照)。すると、ステップ102において、モータ駆動表示器1および乱数カウンタ4を駆動する。これによって、乱数カウンタ4が最小数値から数値を1ずつカウントアップする。その後、ステップ103では、モータ位置検出器2からの位置信号が制御装置3に入力されたか否かを判定する。そして、位置信号が制御装置3に入力された場合、ステップ103がYESになり、ステップ104に進む。ステップ104では、位置信号の入力されたタイミングによって駆動中における乱数カウンタ4の数値を乱数の数値として取得し、取得した乱数の数値を停止知識15に照合し、停止知識15から乱数の数値に対応する初期停止情報を取得し、その初期停止情報より選択された形象5を正面から見える位置に停止するようモータ7を停止する。制御装置3は、乱数カウンタ4の数値を取得した後、乱数カウンタ4の駆動を停止する。
【0011】
例えば、ステップ104に示すように、遊技表示装置が完成してから1回目の電源の投入の場合、表示体6の形象5として「0」がモータ駆動表示器1の前から見えるようになる。また、パチンコ遊技機が完成してから2回目の電源の投入の場合、各表示体6の形象5として「1」がモータ駆動表示器1の前から見えるようになる。よって、電源の投入のごとに停止した異なる形象5をモータ駆動表示器1の前から見せることができるという利点がある。
【0012】
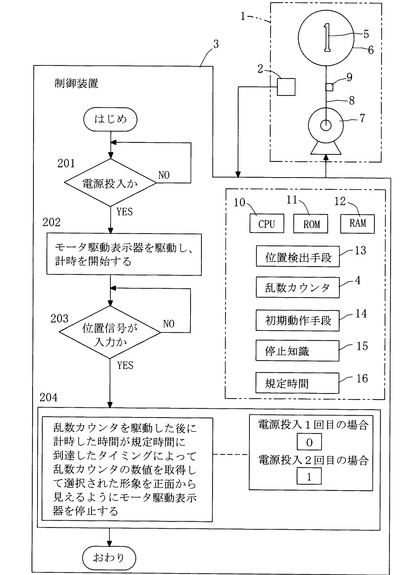
図2は、発明を実施するための第2形態である。図2において、遊技表示装置は、制御装置3のROM11には規定時間16が乱数カウンタ4の数値を取得するための時間として格納された構造が図1と異なる。そして、制御装置3が電源の投入に伴いモータ駆動表示器1を駆動するとともに計時を開始し、モータ位置検出器2がモータ駆動表示器1の回転位置の基準となる位置信号を制御装置3に出力すると、制御装置3が乱数カウンタ4を駆動した後に上記計時した時間が規定時間16に到達したら駆動している乱数カウンタ4の数値を取得しその数値より選択された形象を正面から見えるように上記モータ駆動表示器1の駆動を停止する。このようにモータ駆動表示器1の回転位置の基準となる位置信号を利用しているので、モータ駆動表示器1が電源投入からランダムな遅延時間の遅れなく駆動した後に電源投入ごとに異なる形象5を遊技者に見せるようにモータ駆動表示器1が停止することができるという利点がある。
【0013】
つまり、制御装置3のCPU10は、フローチャートに示すように、電源の投入に伴いCPU10を起動するブート処理に相当するイニシャライズ処理を実行し、当該イニシャライズ処理が終了する(ステップ201がYES参照)。すると、ステップ202において、モータ駆動表示器1を駆動するとともにモータ駆動経過時間の計測としての計時を開始し、ステップ203に進む。ステップ203では、モータ位置検出器2からの位置信号が制御装置3に入力されたか否かを判定する。そして、位置信号が制御装置3に入力された場合、ステップ203がYESになり、ステップ204に進む。ステップ204では、乱数カウンタ4を駆動した後に上記計時した時間が規定時間16に到達したタイミングによって駆動中における乱数カウンタ4の数値を乱数の数値として取得し、取得した乱数の数値を停止知識15に照合し、停止知識15から乱数の数値に対応する初期停止情報を取得し、その初期停止情報より選択された形象5を正面から見える位置に停止するようモータ7を停止する。
【0014】
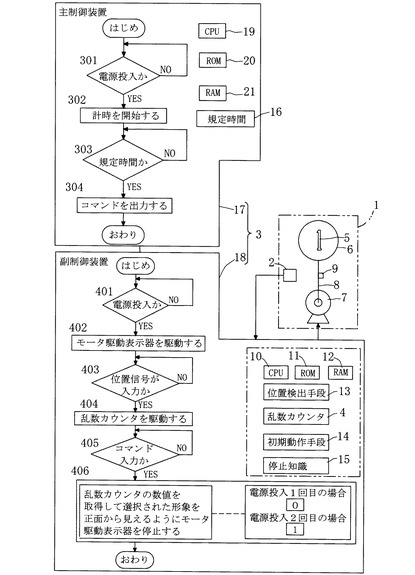
図3は、発明を実施するための第3形態である。図3において、遊技表示装置は、制御装置3が主制御装置17と副制御装置18とに分別構成された構造、規定時間16が主制御装置17のROM20に格納された構造が図1および図2と異なる。そして、主制御装置17が電源の投入に伴いモータ駆動経過時間の計測としての計時を開始し、副制御装置18が電源の投入に伴いモータ駆動表示器1を駆動し、モータ位置検出器2がモータ駆動表示器1の回転位置の基準となる位置信号を副制御装置18に出力すると、副制御装置18が乱数カウンタ4を駆動し、主制御装置17で計時した時間が主制御装置17に設定された規定時間16に到達すると副制御装置18にコマンドを出力し、そのコマンドの入力に伴い副制御装置18が駆動している乱数カウンタ4の数値を取得しその数値より選択された形象を正面から見えるように上記モータ駆動表示器1の駆動を停止する。このようにモータ駆動表示器1の回転位置の基準となる位置信号を利用しているので、モータ駆動表示器1が電源投入からランダムな遅延時間の遅れなく駆動した後に電源投入ごとに異なる形象5を遊技者に見せるようにモータ駆動表示器1が停止することができるという利点がある。副制御装置18は、乱数カウンタ4の数値を取得した後、乱数カウンタ4の駆動を停止する。
【0015】
つまり、主制御装置17のCPU19は、フローチャートに示すように、電源の投入に伴いステップ301がYESになると、CPU19を起動するブート処理に相当するイニシャライズ処理を実行し、当該イニシャライズ処理が終了する(ステップ301がYES参照)。すると、ステップ302において、計時を開始した後、ステップ303に進む。ステップ303では、計時した時間が規定時間16に到達したか否かを判定する。そして、計時した時間が規定時間16に到達した場合、ステップ303がYESになり、ステップ304に進む。ステップ304ではコマンドを副制御装置18に出力する。また、副制御装置18のCPU10は、フローチャートに示すように、電源の投入に伴いCPU10を起動するブート処理に相当するイニシャライズ処理を実行し、当該イニシャライズ処理が終了する(ステップ401がYES参照)。すると、ステップ402において、モータ駆動表示器1を駆動し、ステップ403に進む。ステップ403では、モータ位置検出器2からの位置信号が制御装置3に入力されたか否かを判定する。そして、位置信号が制御装置3に入力された場合、ステップ403がYESになり、ステップ404に進む。ステップ404では、乱数カウンタ4を駆動し、ステップ405に進む。ステップ405では、主制御装置17からコマンドが入力されたか否かを判定する。コマンドが入力された場合、ステップ405がYESになり、ステップ406に進む。ステップ406では、コマンドの入力されたタイミングによって駆動中における乱数カウンタ4の数値を乱数の数値として取得し、取得した乱数の数値を停止知識15に照合し、停止知識15から乱数の数値に対応する初期停止情報を取得し、その初期停止情報より選択された形象5を正面から見える位置に停止するようモータ7を停止する。
【0016】
図4を参照し、遊技表示装置を搭載したパチンコ遊技機について説明する。このパチンコ遊技機では、図1または図2の制御装置3または図3の副制御装置18が図柄制御装置53を構成し、図1乃至図3のモータ駆動表示器1が3個の図柄表示器45を構成した場合を例示する。よって、モータ位置検出器2は、3個設けられる。各図柄表示器45は、表示体6、モータ7、回転機構8、被検出部9を個別に有する。
【0017】
図4において、パチンコ遊技機の遊技機枠31は、遊技機設置構造体に設置される。遊技機設置構造体は、遊技店のパチンコ遊技機を設置する島とも呼ばれる設備である。遊技機枠31の前部には、窓32と前面パネル33と受皿34および発射操作機構35が設けられる。窓32は、前後方向への貫通孔として形成される。前面パネル33は、窓32を後から閉鎖するガラスのような無色の光透過性の有る材料から構成される。受皿34は、パチンコ球と呼ばれる球を入れる容器として設けられる。発射操作機構35は、遊技者の操作量に応じた出力を図外の発射制御装置に出力する可変抵抗器などの電気部品を有する機構である。遊技機枠31の内部には、発射機構36および遊技盤37が設けられる。発射機構36は、発射制御装置からの制御によって発射操作機構35の操作量に応じた発射力で駆動する機構である。
【0018】
遊技盤37が遊技機枠31に交換可能に格納された場合、遊技領域38、ガイドレール39、アウト口40、始動部品41、可変入賞部品42、開閉体43、確定表示器44、図柄表示器45、図外の一般入賞部品が、遊技機枠31の前から窓32および前面パネル33を通して視認可能になる。遊技領域38は、発射機構36から発射された球の飛び交う領域として、前面パネル33と遊技盤37の前面との間におけるガイドレール39で囲まれた部分として形成される。ガイドレール39は、遊技機枠31または遊技盤37に設けられる。アウト口40は、遊技領域38の最下部に到達した球を遊技盤37の後に排出する部分として遊技盤37に設けられる。
【0019】
可変入賞部品42は、開閉体43を開閉駆動源46で開閉する構造である。開閉体43が開放した場合、球が遊技領域38から可変入賞部品42に入り、開閉体43が閉鎖した場合、球が遊技領域38から可変入賞部品42に入らない。確定表示器44は、変動表示後の停止表示によって、始動部品41への球の入りに伴う抽選結果の確定したことを遊技者に知らせるための確定表示を行うものである。
【0020】
遊技盤37または始動部品41には、始動球検出器47が設けられる。始動球検出器47は、始動部品41に入った球を検出して電気的な始動信号を主制御装置51に出力する。遊技盤37または可変入賞部品42には、入賞球検出器48が設けられる。入賞球検出器48は、可変入賞部品42に入った球を検出して電気的な可変入賞信号を主制御装置51に出力する。
【0021】
パチンコ遊技機の動作について説明する。図外の電源装置から電源が主制御装置51と統括制御装置52および図柄制御装置53に供給された場合、図1乃至図3に示すいずれか1つの遊技表示装置の動作が行われる。
【0022】
図1のモータ駆動表示器1が図4における3個の図柄表示器45を構成し、図1の制御装置3が図4の図柄制御装置53を構成した場合、図4では乱数カウンタ4も各図柄表示器45に対応して設けられる。そして、図4において、図柄制御装置53が電源の投入に伴い3個の図柄表示器45および3個の乱数カウンタ4を駆動し、全部のモータ位置検出器2が位置信号を図柄制御装置53に個別に出力すると、図柄制御装置53が位置信号の入力されたタイミングによって駆動中における乱数カウンタ4の数値を乱数の数値として個別に取得し、取得した乱数の数値を停止知識15に個別に照合し、停止知識15から乱数の数値に対応する3個の初期停止情報を取得し、それらの初期停止情報より選択された形象5を正面から見える位置に停止するよう全部のモータ7を停止する。これによって、初期停止情報より選択された3個の形象5が、停止して、遊技機枠31の前から窓32および前面パネル33を通して見える。図柄表示器45の個数は、3個に限定されるものではなく、1個でも、2個でも、4個以上でもよい。
【0023】
図2のモータ駆動表示器1が図4における3個の図柄表示器45を構成し、図2の制御装置3が図4の図柄制御装置53を構成した場合、図4において、図柄制御装置53が電源の投入に伴い3個の図柄表示器45を駆動するとともに計時を開始し、全部のモータ位置検出器2が位置信号を図柄制御装置53に個別に出力すると、図柄制御装置53が乱数カウンタ4を駆動した後に上記計時した時間が規定時間16に到達したタイミングによって駆動中における乱数カウンタ4の数値を乱数の数値として取得し、取得した乱数の数値を停止知識15に照合し、停止知識15から乱数の数値に対応する初期停止情報を取得し、その初期停止情報より選択された形象5を正面から見える位置に停止するよう全部のモータ7を停止する。これによって、初期停止情報より選択された3個の形象5が、停止して、遊技機枠31の前から窓32および前面パネル33を通して見える。
【0024】
図3のモータ駆動表示器1が図4における3個の図柄表示器45を構成し、図3の主制御装置17が図4の主制御装置51を構成し、図3の副制御装置18が図4の図柄制御装置53を構成した場合、図4において、主制御装置51が電源の投入に伴い計時を開始し、図柄制御装置53が電源の投入に伴い3個の図柄表示器45を駆動し、全部のモータ位置検出器2が位置信号を図柄制御装置53に個別に出力すると、図柄制御装置53が乱数カウンタ4を駆動し、主制御装置51で計時した時間が規定時間16に到達すると図柄制御装置53にコマンドを出力し、図柄制御装置53がコマンドの入力されたタイミングによって駆動中における乱数カウンタ4の数値を乱数の数値として取得し、取得した乱数の数値を停止知識15に照合し、停止知識15から乱数の数値に対応する初期停止情報を取得し、その初期停止情報より選択された形象5を正面から見える位置に停止するよう全部のモータ7を停止する。これによって、初期停止情報より選択された3個の形象5が、停止して、遊技機枠31の前から窓32および前面パネル33を通して見える。
【0025】
前記いずれの場合にあっても、例えば、パチンコ遊技機が完成してから1回目の電源の投入の場合、3個の形象5として「1;2;3」が遊技機枠31の前から見えるようになり、パチンコ遊技機が完成してから2回目の電源の投入の場合、3個の形象5として「4;6;8」が遊技機枠31の前から見えるようになるというように、電源の投入のごとに停止した形象5が異なる形態として、遊技機枠31の前から見えるようになるという利点がある。
【0026】
前記のように3個の形象5が電源の投入に伴い遊技機枠31の前から見えるように停止した場合、開閉体43は閉じている。その後、遊技者が受皿34にパチンコ球と呼ばれる球を入れて発射操作機構35を操作すると、発射操作機構35が操作量に相当する可変抵抗値を図外の発射制御装置に出力し、発射制御装置が入力された可変抵抗値に応じた発射力で発射機構36を駆動し、発射機構36が受皿34から遊技機枠31の内部に取り込まれた球を1個ずつ遊技領域38に向けて発射する。
【0027】
遊技領域38に到達した球は、遊技領域38を流下する過程において、始動部品41や可変入賞部品42および一般入賞部品などの遊技部品に衝突して、流れる方向を変えながら、始動部品41または一般入賞部品に入る。始動部品41または一般入賞部品のいずれにも入らないで、遊技領域38の最下部に到達した球は、アウト口40から遊技盤37の後に排出される。遊技領域38を流下する球が一般入賞部品に入った場合、一般入賞部品に対応する入賞球検出器が一般入賞部品に入った球を検出して電気的な一般入賞信号を主制御装置51に出力し、主制御装置51がROMから抽出した一般入賞信号に対応する賞球払出個数および賞球払出に関する遊技情報を払出制御装置に出力し、払出制御装置が入力された賞球払出個数の賞球を払い出すように図外の球払出機構を制御し、球払出機構が賞球としての球を遊技者に払い出すべく受皿34に払い出す。
【0028】
遊技領域38を流下する球が始動部品41に入った場合、始動球検出器47が始動信号を主制御装置51に出力し、主制御装置51のCPUが抽選処理と演出処理および確定処理を実行する。抽選処理は、内部抽選と呼ばれ、主制御装置51のCPUが始動信号の入力されたタイミングに基づいて乱数カウンタの数値を乱数の数値として取得し、取得した乱数の数値をROMに格納された抽選知識に照合し、抽選知識から照合した乱数の数値に対応する抽選結果を抽出してRAMに記憶するとともに統括制御装置52に出力する。抽選結果としては、外れ、当たりのいずれか1つが選出される。乱数カウンタは、最小数値から数値を1ずつカウントアップし、カウントアップした数値が最大数値に到達した後に最小数値に戻る、巡回形のソフトカウンタまたは巡回形のハードカウンタである。乱数カウンタの最小数値は、抽選知識における乱数として設定された最小数値と同じ数値である。乱数カウンタの最大数値は、抽選知識における乱数として設定された最大数値と同じ数値である。抽選知識は、乱数の数値と抽選結果との関係を規定したテーブルとして構成されたデータベースである。図4において、結合子Aどうしは互いに接続される。
【0029】
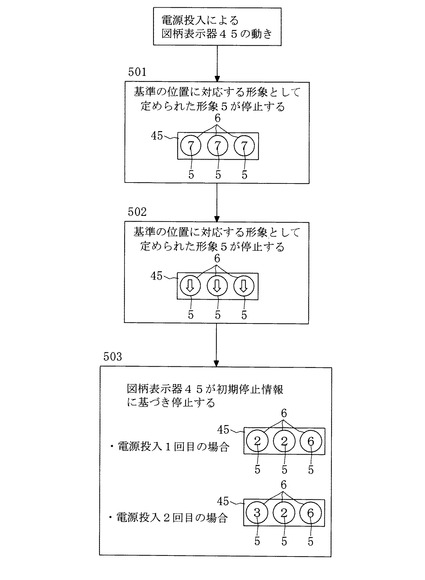
図5を参照し、電源の投入に伴う図4の図柄表示器45の動きの異なる形態について説明する。図5に示す形態は、図3のモータ駆動表示器1が図4における3個の図柄表示器45を構成し、図3の主制御装置が図4の主制御装置51を構成し、図3の副制御装置18が図4の図柄制御装置53を構成した場合に適用可能となる。図5において、ステップ501は、全部の図柄表示器45が電源の投入に伴い駆動し、全部のモータ位置検出器2が位置信号を図柄制御装置53に個別に出力すると、各図柄表示器45の基準の位置に対応する形象として定められた形象5が1個ずつ正面から見える位置に停止する。例えば、基準の位置に対応する形象として定められた形象5「7:7:7」が図柄表示器45の前から見えるようになる。
【0030】
そして、ステップ502では、上記基準の位置に対応する形象が停止した後、各図柄表示器45が再び駆動する。各表示体6の枠内に表示した矢印は、各表示体6の回転したことを表現している。その後、主制御装置51で計時した時間が規定時間16に到達したことを示すコマンドが主制御装置51から図柄制御装置53に入力された場合、図柄制御装置53がコマンドの入力されたタイミングによって駆動中における乱数カウンタ4の数値を乱数の数値として取得し、取得した乱数の数値を停止知識15に照合し停止知識15から乱数の数値に対応する初期停止情報を取得し、その初期停止情報より選択された形象5を正面から見える位置に停止するよう全部のモータ7を停止する。これによって、全部の図柄表示器45が、ステップ503に示すように、例えば、パチンコ遊技機が完成してから1回目の電源の投入の場合、各表示体6の形象5「2:2:6」が図柄表示器45の前から見えるようになり、パチンコ遊技機が完成してから2回目の電源の投入の場合、各表示体6の形象5「3:2:6」が図柄表示器45の前から見えるようになる。よって、遊技者が、図柄表示器45を前から見た場合、電源スイッチ投入のごとに停止した異なる形象5を確認することができるという利点がある。
【産業上の利用可能性】
【0031】
各形態において、モータ位置検出器2と被検出部9とからなるモータ位置検出機構をモータ7の回転位置を検出するエンコーダで構成してもよい。また、モータ駆動表示器1の原点位置信号を回転位置の基準となる位置信号として使用してもよい。
【0032】
図2または図3において、制御装置3または副制御装置18が電源の投入に伴いモータ駆動表示器1および乱数カウンタ4を駆動してもよい。この場合、乱数カウンタ4が電源の投入に伴い駆動される第1動作処理と、乱数カウンタ4がモータ駆動表示器1の回転位置の基準となる位置信号の入力に伴い駆動される第2動作処理とによって、乱数カウンタ4の数値を計数する動作形態を変える。例えば、制御装置3または副制御装置18が第1動作処理を実行することによって、乱数カウンタ4が「0;2;4;6…」というように、数値を1ずつとばしてカウントアップし、制御装置3または副制御装置18が第2動作処理を実行することによって、乱数カウンタ4が「0;1;2;3…」というように、数値を1ずつカウントアップする。また、逆に、制御装置3または副制御装置18が第1動作処理を実行することによって、乱数カウンタ4が「0;1;2;3…」というように、数値を1ずつカウントアップし、制御装置3または副制御装置18が第2動作処理を実行することによって、乱数カウンタ4が「0;2;4;6…」というように、数値を1ずつとばしてカウントアップする。乱数カウンタ4が数値をとばしてカウントアップする場合、「2ずつ」、「3ずつ」というように、「1ずつ」に限定されるものではない。
【0033】
図4において、統括制御装置52は除去してもよい。
【0034】
遊技表示装置はスロットマシンにも搭載してもよい。
【図面の簡単な説明】
【0035】
【図1】遊技表示装置の模式図(第1形態)。
【図2】遊技表示装置の模式図(第2形態)。
【図3】遊技表示装置の模式図(第3形態)。
【図4】遊技表示装置を搭載したパチンコ遊技機(第3形態)。
【図5】図柄表示器の動きの図表(第4形態)。
【符号の説明】
【0036】
1はモータ駆動表示器、2はモータ位置検出器、3は制御装置、4は乱数カウンタ、5は形象、6は表示体、7はモータ、8は回転機構、9は被検出部、10はCPU、11はROM、12はRAM、13は位置検出手段、14は初期動作手段、15は停止知識、16は規定時間、17は主制御装置、18は副制御装置、19はCPU、20はROM、21はRAM、22乃至30は欠番、31は遊技機枠、32は窓、33は前面パネル、34は受皿、35は発射操作機構、36は発射機構、37は遊技盤、38は遊技領域、39はガイドレール、40はアウト口、41は始動部品、42は可変入賞部品、43は開閉体、44は確定表示器、45は図柄表示器、46は開閉駆動源、47は始動球検出器、48は入賞球検出器、49;50は欠番、51は主制御装置、52は統括制御装置、53は図柄制御装置。
【技術分野】
【0001】
本発明は、モータ駆動表示器が電源の投入ごとに選択された形象を正面から見える位置に停止する遊技表示装置に関する。
【背景技術】
【0002】
遊技表示装置には、特許文献1のように、可変表示装置などのモータ駆動表示器が電源投入後に所定の識別情報などの形象を表示するように停止していないときは、即座に、モータ駆動表示器の故障であることを分かるようにしたものが知られている。しかしながら、特許文献1で開示されたものは、電源投入後に停止される形象を電源投入ごとに異なる形象にすることができないという欠点がある。また、特許文献2のように、図柄表示器が電源回路から遅延回路を経由する電源投入後のランダムな遅延時間に基づき表示図柄にランダム性を持たせるようにしたものが知られている。しかしながら、特許文献2で開示されたものは、図柄表示器が電源投入からランダムな遅延時間だけ遅れて駆動するという欠点がある。
【特許文献1】特許第2676196号公報
【特許文献2】特許第2849688号公報
【発明の開示】
【発明が解決しようとする課題】
【0003】
発明が解決しようとする問題点は、特許文献1に記載された発明および特許文献2に記載された発明を組み合わせたとしても、電源投入からランダムな遅延時間の遅れなくモータ駆動表示器を駆動した後に電源投入ごとに異なる形象を遊技者に見せるようにモータ駆動表示器を停止させることができないという点である。
【課題を解決するための手段】
【0004】
本発明に係る遊技表示装置は、モータ駆動表示器、モータ位置検出器、制御装置、乱数カウンタを備えた遊技表示装置において、制御装置が電源の投入に伴いモータ駆動表示器および乱数カウンタを駆動させかつ計時を開始し、モータ位置検出器がモータ駆動表示器の回転位置の基準となる位置信号を制御装置に出力すると、制御装置が上記駆動した乱数カウンタの数値を取得しその数値より選択された形象を正面から見えるように上記モータ駆動表示器の駆動を停止させるか、または、モータ駆動表示器、モータ位置検出器、制御装置、乱数カウンタを備えた遊技表示装置において、制御装置が電源の投入に伴いモータ駆動表示器を駆動させるとともに計時を開始し、モータ位置検出器がモータ駆動表示器の回転位置の基準となる位置信号を制御装置に出力すると、制御装置が乱数カウンタを駆動した後に上記計時した時間が制御装置に設定された規定時間に到達するのに伴い上記駆動した乱数カウンタの数値を取得しその数値より選択された形象を正面から見えるように上記モータ駆動表示器の駆動を停止させるか、または、モータ駆動表示器、モータ位置検出器、主制御装置、副制御装置、乱数カウンタを備えた遊技制御装置において、主制御装置が電源の投入に伴い計時を開始し、副制御装置が電源の投入に伴いモータ駆動表示器を駆動させ、モータ位置検出器がモータ駆動表示器の回転位置の基準となる位置信号を副制御装置に出力すると、副制御装置が乱数カウンタを駆動し、上記主制御装置で計時した時間が主制御装置に設定された規定時間に到達すると副制御装置にコマンドを出力し、そのコマンドの入力に伴い副制御装置が上記駆動した乱数カウンタの数値を取得しその数値より選択された形象を正面から見えるように上記モータ駆動表示器の駆動を停止させることを最も主要な特徴とする。
【発明の効果】
【0005】
本発明に係る遊技表示装置は、モータ駆動表示器の回転位置の基準となる位置信号を利用して形象を正面から見えるようにモータ駆動表示器を停止するので、モータ駆動表示器が電源投入からランダムな遅延時間の遅れなく駆動した後に電源投入ごとに異なる形象を遊技者に見せるようにモータ駆動表示器が停止することができるという利点がある。
【発明を実施するための最良の形態】
【0006】
図1は、発明を実施するための第1形態である。図1において、遊技表示装置は、モータ駆動表示器1、モータ位置検出器2、制御装置3、乱数カウンタ4を備える。そして、制御装置3が電源の投入に伴いモータ駆動表示器1および乱数カウンタ4を駆動し、モータ位置検出器2がモータ駆動表示器1の回転位置の基準となる位置信号を制御装置3に出力すると、制御装置3が駆動している乱数カウンタ4の数値を取得しその数値より選択された形象5を正面から見えるように上記モータ駆動表示器1の駆動を停止する。制御装置3は、乱数カウンタ4の数値を取得した後、乱数カウンタ4の駆動を停止する。
【0007】
つまり、モータ駆動表示器1が駆動してからモータ位置検出器2が位置信号を出力するまでの時間、換言するならば、制御装置3がモータ駆動表示器1を駆動してからモータ位置検出器2からの位置信号を検出するまでの時間は、モータ駆動表示器1が駆動を開始する際において、モータ位置検出器2が被検出部9から遠い場合と近い場合とで異なる。このため、上記のように、モータ駆動表示器1の回転位置の基準となる位置信号を利用して形象5を正面から見えるようにモータ駆動表示器1を停止することによって、モータ駆動表示器1が電源投入からランダムな遅延時間の遅れなく駆動した後に電源投入ごとに異なる形象5を遊技者に見せるようにモータ駆動表示器1が停止することができるという利点がある。
【0008】
モータ駆動表示器1は、表示体6をモータ7で回転する構造である。表示体6には、複数の形状の異なる形象5が表示体6の外側から見えるように設けられる。各形象5の異なる形状は不変である。モータ7は、ステップモータにより構成される。表示体6がモータ7で回転された状態において、遊技者がモータ駆動表示器1を正面から見ると、表示体6における複数の形象5が上から下にまたは下から上にまたは左から右にまたは右から左に順に移動して変動するように見える。つまり、モータ駆動表示器1では、表示体6がモータ7で回転すると、複数の形象5が変動表示される。モータ7の動力を表示体6に伝達する回転機構8には、被検出部9が回転機構8と一緒に回転するように設けられる。モータ位置検出器2はモータ駆動表示器1の回転位置の基準となる位置を検出するものであって、モータ駆動表示器1の固定部に設けられ、被検出部9を検出するごとに基準位置信号を制御装置3に出力する。
【0009】
制御装置3は、乱数カウンタ4、CPU10、ROM11、RAM12、位置検出手段13、初期動作手段14、停止知識15を備える。位置検出手段13および初期動作手段14は、制御装置3のCPU10がRAM12を処理データのメモリとして使用しながらROM11に格納されたコンピュータプログラムに従う動作により具現化される。乱数カウンタ4は、最小数値から数値を1ずつカウントアップし、カウントアップした数値が最大数値に到達した後に最小数値に戻る、巡回形のソフトカウンタまたは巡回形のハードカウンタとして構成される。乱数カウンタ4の最小数値は、停止知識15における乱数として設定された最小数値と同じ数値である。乱数カウンタ4の最大数値は、停止知識15における乱数として設定された最大数値と同じ数値である。停止知識15は、制御装置3のROM11に格納され、乱数の数値と初期停止情報との関係を規定したテーブルとして構成されたデータベースである。
【0010】
そして、制御装置3のCPU10は、フローチャートに示すように、電源の投入に伴いCPU10を起動するブート処理に相当するイニシャライズ処理を実行し、当該イニシャライズ処理が終了する(ステップ101がYES参照)。すると、ステップ102において、モータ駆動表示器1および乱数カウンタ4を駆動する。これによって、乱数カウンタ4が最小数値から数値を1ずつカウントアップする。その後、ステップ103では、モータ位置検出器2からの位置信号が制御装置3に入力されたか否かを判定する。そして、位置信号が制御装置3に入力された場合、ステップ103がYESになり、ステップ104に進む。ステップ104では、位置信号の入力されたタイミングによって駆動中における乱数カウンタ4の数値を乱数の数値として取得し、取得した乱数の数値を停止知識15に照合し、停止知識15から乱数の数値に対応する初期停止情報を取得し、その初期停止情報より選択された形象5を正面から見える位置に停止するようモータ7を停止する。制御装置3は、乱数カウンタ4の数値を取得した後、乱数カウンタ4の駆動を停止する。
【0011】
例えば、ステップ104に示すように、遊技表示装置が完成してから1回目の電源の投入の場合、表示体6の形象5として「0」がモータ駆動表示器1の前から見えるようになる。また、パチンコ遊技機が完成してから2回目の電源の投入の場合、各表示体6の形象5として「1」がモータ駆動表示器1の前から見えるようになる。よって、電源の投入のごとに停止した異なる形象5をモータ駆動表示器1の前から見せることができるという利点がある。
【0012】
図2は、発明を実施するための第2形態である。図2において、遊技表示装置は、制御装置3のROM11には規定時間16が乱数カウンタ4の数値を取得するための時間として格納された構造が図1と異なる。そして、制御装置3が電源の投入に伴いモータ駆動表示器1を駆動するとともに計時を開始し、モータ位置検出器2がモータ駆動表示器1の回転位置の基準となる位置信号を制御装置3に出力すると、制御装置3が乱数カウンタ4を駆動した後に上記計時した時間が規定時間16に到達したら駆動している乱数カウンタ4の数値を取得しその数値より選択された形象を正面から見えるように上記モータ駆動表示器1の駆動を停止する。このようにモータ駆動表示器1の回転位置の基準となる位置信号を利用しているので、モータ駆動表示器1が電源投入からランダムな遅延時間の遅れなく駆動した後に電源投入ごとに異なる形象5を遊技者に見せるようにモータ駆動表示器1が停止することができるという利点がある。
【0013】
つまり、制御装置3のCPU10は、フローチャートに示すように、電源の投入に伴いCPU10を起動するブート処理に相当するイニシャライズ処理を実行し、当該イニシャライズ処理が終了する(ステップ201がYES参照)。すると、ステップ202において、モータ駆動表示器1を駆動するとともにモータ駆動経過時間の計測としての計時を開始し、ステップ203に進む。ステップ203では、モータ位置検出器2からの位置信号が制御装置3に入力されたか否かを判定する。そして、位置信号が制御装置3に入力された場合、ステップ203がYESになり、ステップ204に進む。ステップ204では、乱数カウンタ4を駆動した後に上記計時した時間が規定時間16に到達したタイミングによって駆動中における乱数カウンタ4の数値を乱数の数値として取得し、取得した乱数の数値を停止知識15に照合し、停止知識15から乱数の数値に対応する初期停止情報を取得し、その初期停止情報より選択された形象5を正面から見える位置に停止するようモータ7を停止する。
【0014】
図3は、発明を実施するための第3形態である。図3において、遊技表示装置は、制御装置3が主制御装置17と副制御装置18とに分別構成された構造、規定時間16が主制御装置17のROM20に格納された構造が図1および図2と異なる。そして、主制御装置17が電源の投入に伴いモータ駆動経過時間の計測としての計時を開始し、副制御装置18が電源の投入に伴いモータ駆動表示器1を駆動し、モータ位置検出器2がモータ駆動表示器1の回転位置の基準となる位置信号を副制御装置18に出力すると、副制御装置18が乱数カウンタ4を駆動し、主制御装置17で計時した時間が主制御装置17に設定された規定時間16に到達すると副制御装置18にコマンドを出力し、そのコマンドの入力に伴い副制御装置18が駆動している乱数カウンタ4の数値を取得しその数値より選択された形象を正面から見えるように上記モータ駆動表示器1の駆動を停止する。このようにモータ駆動表示器1の回転位置の基準となる位置信号を利用しているので、モータ駆動表示器1が電源投入からランダムな遅延時間の遅れなく駆動した後に電源投入ごとに異なる形象5を遊技者に見せるようにモータ駆動表示器1が停止することができるという利点がある。副制御装置18は、乱数カウンタ4の数値を取得した後、乱数カウンタ4の駆動を停止する。
【0015】
つまり、主制御装置17のCPU19は、フローチャートに示すように、電源の投入に伴いステップ301がYESになると、CPU19を起動するブート処理に相当するイニシャライズ処理を実行し、当該イニシャライズ処理が終了する(ステップ301がYES参照)。すると、ステップ302において、計時を開始した後、ステップ303に進む。ステップ303では、計時した時間が規定時間16に到達したか否かを判定する。そして、計時した時間が規定時間16に到達した場合、ステップ303がYESになり、ステップ304に進む。ステップ304ではコマンドを副制御装置18に出力する。また、副制御装置18のCPU10は、フローチャートに示すように、電源の投入に伴いCPU10を起動するブート処理に相当するイニシャライズ処理を実行し、当該イニシャライズ処理が終了する(ステップ401がYES参照)。すると、ステップ402において、モータ駆動表示器1を駆動し、ステップ403に進む。ステップ403では、モータ位置検出器2からの位置信号が制御装置3に入力されたか否かを判定する。そして、位置信号が制御装置3に入力された場合、ステップ403がYESになり、ステップ404に進む。ステップ404では、乱数カウンタ4を駆動し、ステップ405に進む。ステップ405では、主制御装置17からコマンドが入力されたか否かを判定する。コマンドが入力された場合、ステップ405がYESになり、ステップ406に進む。ステップ406では、コマンドの入力されたタイミングによって駆動中における乱数カウンタ4の数値を乱数の数値として取得し、取得した乱数の数値を停止知識15に照合し、停止知識15から乱数の数値に対応する初期停止情報を取得し、その初期停止情報より選択された形象5を正面から見える位置に停止するようモータ7を停止する。
【0016】
図4を参照し、遊技表示装置を搭載したパチンコ遊技機について説明する。このパチンコ遊技機では、図1または図2の制御装置3または図3の副制御装置18が図柄制御装置53を構成し、図1乃至図3のモータ駆動表示器1が3個の図柄表示器45を構成した場合を例示する。よって、モータ位置検出器2は、3個設けられる。各図柄表示器45は、表示体6、モータ7、回転機構8、被検出部9を個別に有する。
【0017】
図4において、パチンコ遊技機の遊技機枠31は、遊技機設置構造体に設置される。遊技機設置構造体は、遊技店のパチンコ遊技機を設置する島とも呼ばれる設備である。遊技機枠31の前部には、窓32と前面パネル33と受皿34および発射操作機構35が設けられる。窓32は、前後方向への貫通孔として形成される。前面パネル33は、窓32を後から閉鎖するガラスのような無色の光透過性の有る材料から構成される。受皿34は、パチンコ球と呼ばれる球を入れる容器として設けられる。発射操作機構35は、遊技者の操作量に応じた出力を図外の発射制御装置に出力する可変抵抗器などの電気部品を有する機構である。遊技機枠31の内部には、発射機構36および遊技盤37が設けられる。発射機構36は、発射制御装置からの制御によって発射操作機構35の操作量に応じた発射力で駆動する機構である。
【0018】
遊技盤37が遊技機枠31に交換可能に格納された場合、遊技領域38、ガイドレール39、アウト口40、始動部品41、可変入賞部品42、開閉体43、確定表示器44、図柄表示器45、図外の一般入賞部品が、遊技機枠31の前から窓32および前面パネル33を通して視認可能になる。遊技領域38は、発射機構36から発射された球の飛び交う領域として、前面パネル33と遊技盤37の前面との間におけるガイドレール39で囲まれた部分として形成される。ガイドレール39は、遊技機枠31または遊技盤37に設けられる。アウト口40は、遊技領域38の最下部に到達した球を遊技盤37の後に排出する部分として遊技盤37に設けられる。
【0019】
可変入賞部品42は、開閉体43を開閉駆動源46で開閉する構造である。開閉体43が開放した場合、球が遊技領域38から可変入賞部品42に入り、開閉体43が閉鎖した場合、球が遊技領域38から可変入賞部品42に入らない。確定表示器44は、変動表示後の停止表示によって、始動部品41への球の入りに伴う抽選結果の確定したことを遊技者に知らせるための確定表示を行うものである。
【0020】
遊技盤37または始動部品41には、始動球検出器47が設けられる。始動球検出器47は、始動部品41に入った球を検出して電気的な始動信号を主制御装置51に出力する。遊技盤37または可変入賞部品42には、入賞球検出器48が設けられる。入賞球検出器48は、可変入賞部品42に入った球を検出して電気的な可変入賞信号を主制御装置51に出力する。
【0021】
パチンコ遊技機の動作について説明する。図外の電源装置から電源が主制御装置51と統括制御装置52および図柄制御装置53に供給された場合、図1乃至図3に示すいずれか1つの遊技表示装置の動作が行われる。
【0022】
図1のモータ駆動表示器1が図4における3個の図柄表示器45を構成し、図1の制御装置3が図4の図柄制御装置53を構成した場合、図4では乱数カウンタ4も各図柄表示器45に対応して設けられる。そして、図4において、図柄制御装置53が電源の投入に伴い3個の図柄表示器45および3個の乱数カウンタ4を駆動し、全部のモータ位置検出器2が位置信号を図柄制御装置53に個別に出力すると、図柄制御装置53が位置信号の入力されたタイミングによって駆動中における乱数カウンタ4の数値を乱数の数値として個別に取得し、取得した乱数の数値を停止知識15に個別に照合し、停止知識15から乱数の数値に対応する3個の初期停止情報を取得し、それらの初期停止情報より選択された形象5を正面から見える位置に停止するよう全部のモータ7を停止する。これによって、初期停止情報より選択された3個の形象5が、停止して、遊技機枠31の前から窓32および前面パネル33を通して見える。図柄表示器45の個数は、3個に限定されるものではなく、1個でも、2個でも、4個以上でもよい。
【0023】
図2のモータ駆動表示器1が図4における3個の図柄表示器45を構成し、図2の制御装置3が図4の図柄制御装置53を構成した場合、図4において、図柄制御装置53が電源の投入に伴い3個の図柄表示器45を駆動するとともに計時を開始し、全部のモータ位置検出器2が位置信号を図柄制御装置53に個別に出力すると、図柄制御装置53が乱数カウンタ4を駆動した後に上記計時した時間が規定時間16に到達したタイミングによって駆動中における乱数カウンタ4の数値を乱数の数値として取得し、取得した乱数の数値を停止知識15に照合し、停止知識15から乱数の数値に対応する初期停止情報を取得し、その初期停止情報より選択された形象5を正面から見える位置に停止するよう全部のモータ7を停止する。これによって、初期停止情報より選択された3個の形象5が、停止して、遊技機枠31の前から窓32および前面パネル33を通して見える。
【0024】
図3のモータ駆動表示器1が図4における3個の図柄表示器45を構成し、図3の主制御装置17が図4の主制御装置51を構成し、図3の副制御装置18が図4の図柄制御装置53を構成した場合、図4において、主制御装置51が電源の投入に伴い計時を開始し、図柄制御装置53が電源の投入に伴い3個の図柄表示器45を駆動し、全部のモータ位置検出器2が位置信号を図柄制御装置53に個別に出力すると、図柄制御装置53が乱数カウンタ4を駆動し、主制御装置51で計時した時間が規定時間16に到達すると図柄制御装置53にコマンドを出力し、図柄制御装置53がコマンドの入力されたタイミングによって駆動中における乱数カウンタ4の数値を乱数の数値として取得し、取得した乱数の数値を停止知識15に照合し、停止知識15から乱数の数値に対応する初期停止情報を取得し、その初期停止情報より選択された形象5を正面から見える位置に停止するよう全部のモータ7を停止する。これによって、初期停止情報より選択された3個の形象5が、停止して、遊技機枠31の前から窓32および前面パネル33を通して見える。
【0025】
前記いずれの場合にあっても、例えば、パチンコ遊技機が完成してから1回目の電源の投入の場合、3個の形象5として「1;2;3」が遊技機枠31の前から見えるようになり、パチンコ遊技機が完成してから2回目の電源の投入の場合、3個の形象5として「4;6;8」が遊技機枠31の前から見えるようになるというように、電源の投入のごとに停止した形象5が異なる形態として、遊技機枠31の前から見えるようになるという利点がある。
【0026】
前記のように3個の形象5が電源の投入に伴い遊技機枠31の前から見えるように停止した場合、開閉体43は閉じている。その後、遊技者が受皿34にパチンコ球と呼ばれる球を入れて発射操作機構35を操作すると、発射操作機構35が操作量に相当する可変抵抗値を図外の発射制御装置に出力し、発射制御装置が入力された可変抵抗値に応じた発射力で発射機構36を駆動し、発射機構36が受皿34から遊技機枠31の内部に取り込まれた球を1個ずつ遊技領域38に向けて発射する。
【0027】
遊技領域38に到達した球は、遊技領域38を流下する過程において、始動部品41や可変入賞部品42および一般入賞部品などの遊技部品に衝突して、流れる方向を変えながら、始動部品41または一般入賞部品に入る。始動部品41または一般入賞部品のいずれにも入らないで、遊技領域38の最下部に到達した球は、アウト口40から遊技盤37の後に排出される。遊技領域38を流下する球が一般入賞部品に入った場合、一般入賞部品に対応する入賞球検出器が一般入賞部品に入った球を検出して電気的な一般入賞信号を主制御装置51に出力し、主制御装置51がROMから抽出した一般入賞信号に対応する賞球払出個数および賞球払出に関する遊技情報を払出制御装置に出力し、払出制御装置が入力された賞球払出個数の賞球を払い出すように図外の球払出機構を制御し、球払出機構が賞球としての球を遊技者に払い出すべく受皿34に払い出す。
【0028】
遊技領域38を流下する球が始動部品41に入った場合、始動球検出器47が始動信号を主制御装置51に出力し、主制御装置51のCPUが抽選処理と演出処理および確定処理を実行する。抽選処理は、内部抽選と呼ばれ、主制御装置51のCPUが始動信号の入力されたタイミングに基づいて乱数カウンタの数値を乱数の数値として取得し、取得した乱数の数値をROMに格納された抽選知識に照合し、抽選知識から照合した乱数の数値に対応する抽選結果を抽出してRAMに記憶するとともに統括制御装置52に出力する。抽選結果としては、外れ、当たりのいずれか1つが選出される。乱数カウンタは、最小数値から数値を1ずつカウントアップし、カウントアップした数値が最大数値に到達した後に最小数値に戻る、巡回形のソフトカウンタまたは巡回形のハードカウンタである。乱数カウンタの最小数値は、抽選知識における乱数として設定された最小数値と同じ数値である。乱数カウンタの最大数値は、抽選知識における乱数として設定された最大数値と同じ数値である。抽選知識は、乱数の数値と抽選結果との関係を規定したテーブルとして構成されたデータベースである。図4において、結合子Aどうしは互いに接続される。
【0029】
図5を参照し、電源の投入に伴う図4の図柄表示器45の動きの異なる形態について説明する。図5に示す形態は、図3のモータ駆動表示器1が図4における3個の図柄表示器45を構成し、図3の主制御装置が図4の主制御装置51を構成し、図3の副制御装置18が図4の図柄制御装置53を構成した場合に適用可能となる。図5において、ステップ501は、全部の図柄表示器45が電源の投入に伴い駆動し、全部のモータ位置検出器2が位置信号を図柄制御装置53に個別に出力すると、各図柄表示器45の基準の位置に対応する形象として定められた形象5が1個ずつ正面から見える位置に停止する。例えば、基準の位置に対応する形象として定められた形象5「7:7:7」が図柄表示器45の前から見えるようになる。
【0030】
そして、ステップ502では、上記基準の位置に対応する形象が停止した後、各図柄表示器45が再び駆動する。各表示体6の枠内に表示した矢印は、各表示体6の回転したことを表現している。その後、主制御装置51で計時した時間が規定時間16に到達したことを示すコマンドが主制御装置51から図柄制御装置53に入力された場合、図柄制御装置53がコマンドの入力されたタイミングによって駆動中における乱数カウンタ4の数値を乱数の数値として取得し、取得した乱数の数値を停止知識15に照合し停止知識15から乱数の数値に対応する初期停止情報を取得し、その初期停止情報より選択された形象5を正面から見える位置に停止するよう全部のモータ7を停止する。これによって、全部の図柄表示器45が、ステップ503に示すように、例えば、パチンコ遊技機が完成してから1回目の電源の投入の場合、各表示体6の形象5「2:2:6」が図柄表示器45の前から見えるようになり、パチンコ遊技機が完成してから2回目の電源の投入の場合、各表示体6の形象5「3:2:6」が図柄表示器45の前から見えるようになる。よって、遊技者が、図柄表示器45を前から見た場合、電源スイッチ投入のごとに停止した異なる形象5を確認することができるという利点がある。
【産業上の利用可能性】
【0031】
各形態において、モータ位置検出器2と被検出部9とからなるモータ位置検出機構をモータ7の回転位置を検出するエンコーダで構成してもよい。また、モータ駆動表示器1の原点位置信号を回転位置の基準となる位置信号として使用してもよい。
【0032】
図2または図3において、制御装置3または副制御装置18が電源の投入に伴いモータ駆動表示器1および乱数カウンタ4を駆動してもよい。この場合、乱数カウンタ4が電源の投入に伴い駆動される第1動作処理と、乱数カウンタ4がモータ駆動表示器1の回転位置の基準となる位置信号の入力に伴い駆動される第2動作処理とによって、乱数カウンタ4の数値を計数する動作形態を変える。例えば、制御装置3または副制御装置18が第1動作処理を実行することによって、乱数カウンタ4が「0;2;4;6…」というように、数値を1ずつとばしてカウントアップし、制御装置3または副制御装置18が第2動作処理を実行することによって、乱数カウンタ4が「0;1;2;3…」というように、数値を1ずつカウントアップする。また、逆に、制御装置3または副制御装置18が第1動作処理を実行することによって、乱数カウンタ4が「0;1;2;3…」というように、数値を1ずつカウントアップし、制御装置3または副制御装置18が第2動作処理を実行することによって、乱数カウンタ4が「0;2;4;6…」というように、数値を1ずつとばしてカウントアップする。乱数カウンタ4が数値をとばしてカウントアップする場合、「2ずつ」、「3ずつ」というように、「1ずつ」に限定されるものではない。
【0033】
図4において、統括制御装置52は除去してもよい。
【0034】
遊技表示装置はスロットマシンにも搭載してもよい。
【図面の簡単な説明】
【0035】
【図1】遊技表示装置の模式図(第1形態)。
【図2】遊技表示装置の模式図(第2形態)。
【図3】遊技表示装置の模式図(第3形態)。
【図4】遊技表示装置を搭載したパチンコ遊技機(第3形態)。
【図5】図柄表示器の動きの図表(第4形態)。
【符号の説明】
【0036】
1はモータ駆動表示器、2はモータ位置検出器、3は制御装置、4は乱数カウンタ、5は形象、6は表示体、7はモータ、8は回転機構、9は被検出部、10はCPU、11はROM、12はRAM、13は位置検出手段、14は初期動作手段、15は停止知識、16は規定時間、17は主制御装置、18は副制御装置、19はCPU、20はROM、21はRAM、22乃至30は欠番、31は遊技機枠、32は窓、33は前面パネル、34は受皿、35は発射操作機構、36は発射機構、37は遊技盤、38は遊技領域、39はガイドレール、40はアウト口、41は始動部品、42は可変入賞部品、43は開閉体、44は確定表示器、45は図柄表示器、46は開閉駆動源、47は始動球検出器、48は入賞球検出器、49;50は欠番、51は主制御装置、52は統括制御装置、53は図柄制御装置。
【特許請求の範囲】
【請求項1】
モータ駆動表示器、モータ位置検出器、制御装置、乱数カウンタを備えた遊技表示装置において、制御装置が電源の投入に伴いモータ駆動表示器および乱数カウンタを駆動させかつ計時を開始し、モータ位置検出器がモータ駆動表示器の回転位置の基準となる位置信号を制御装置に出力すると、制御装置が上記駆動した乱数カウンタの数値を取得しその数値より選択された形象を正面から見えるように上記モータ駆動表示器の駆動を停止させることを特徴とする遊技表示装置。
【請求項2】
モータ駆動表示器、モータ位置検出器、制御装置、乱数カウンタを備えた遊技表示装置において、制御装置が電源の投入に伴いモータ駆動表示器を駆動させるとともに計時を開始し、モータ位置検出器がモータ駆動表示器の回転位置の基準となる位置信号を制御装置に出力すると、制御装置が乱数カウンタを駆動した後に上記計時した時間が制御装置に設定された規定時間に到達するのに伴い上記駆動した乱数カウンタの数値を取得しその数値より選択された形象を正面から見えるように上記モータ駆動表示器の駆動を停止させることを特徴とする遊技表示装置。
【請求項3】
モータ駆動表示器、モータ位置検出器、主制御装置、副制御装置、乱数カウンタを備えた遊技制御装置において、主制御装置が電源の投入に伴い計時を開始し、副制御装置が電源の投入に伴いモータ駆動表示器を駆動させ、モータ位置検出器がモータ駆動表示器の回転位置の基準となる位置信号を副制御装置に出力すると、副制御装置が乱数カウンタを駆動し、上記主制御装置で計時した時間が主制御装置に設定された規定時間に到達すると副制御装置にコマンドを出力し、そのコマンドの入力に伴い副制御装置が上記駆動した乱数カウンタの数値を取得しその数値より選択された形象を正面から見えるように上記モータ駆動表示器の駆動を停止させることを特徴とする遊技表示装置。
【請求項1】
モータ駆動表示器、モータ位置検出器、制御装置、乱数カウンタを備えた遊技表示装置において、制御装置が電源の投入に伴いモータ駆動表示器および乱数カウンタを駆動させかつ計時を開始し、モータ位置検出器がモータ駆動表示器の回転位置の基準となる位置信号を制御装置に出力すると、制御装置が上記駆動した乱数カウンタの数値を取得しその数値より選択された形象を正面から見えるように上記モータ駆動表示器の駆動を停止させることを特徴とする遊技表示装置。
【請求項2】
モータ駆動表示器、モータ位置検出器、制御装置、乱数カウンタを備えた遊技表示装置において、制御装置が電源の投入に伴いモータ駆動表示器を駆動させるとともに計時を開始し、モータ位置検出器がモータ駆動表示器の回転位置の基準となる位置信号を制御装置に出力すると、制御装置が乱数カウンタを駆動した後に上記計時した時間が制御装置に設定された規定時間に到達するのに伴い上記駆動した乱数カウンタの数値を取得しその数値より選択された形象を正面から見えるように上記モータ駆動表示器の駆動を停止させることを特徴とする遊技表示装置。
【請求項3】
モータ駆動表示器、モータ位置検出器、主制御装置、副制御装置、乱数カウンタを備えた遊技制御装置において、主制御装置が電源の投入に伴い計時を開始し、副制御装置が電源の投入に伴いモータ駆動表示器を駆動させ、モータ位置検出器がモータ駆動表示器の回転位置の基準となる位置信号を副制御装置に出力すると、副制御装置が乱数カウンタを駆動し、上記主制御装置で計時した時間が主制御装置に設定された規定時間に到達すると副制御装置にコマンドを出力し、そのコマンドの入力に伴い副制御装置が上記駆動した乱数カウンタの数値を取得しその数値より選択された形象を正面から見えるように上記モータ駆動表示器の駆動を停止させることを特徴とする遊技表示装置。
【図1】


【図2】
【図3】
【図4】

【図5】
【図2】
【図3】
【図4】
【図5】
【公開番号】特開2008−237277(P2008−237277A)
【公開日】平成20年10月9日(2008.10.9)
【国際特許分類】
【出願番号】特願2007−78468(P2007−78468)
【出願日】平成19年3月26日(2007.3.26)
【出願人】(000154679)株式会社平和 (1,976)
【Fターム(参考)】
【公開日】平成20年10月9日(2008.10.9)
【国際特許分類】
【出願日】平成19年3月26日(2007.3.26)
【出願人】(000154679)株式会社平和 (1,976)
【Fターム(参考)】
[ Back to top ]