
三菱農機株式会社により出願された特許
401 - 410 / 1,502
乗用型田植機
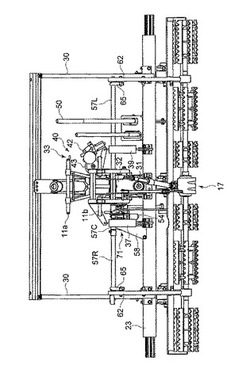
【課題】植付部のローリングバランスが良い乗用型田植機を提供することを目的とする。
【解決手段】植付部15の幅方向に延設された植付部フレーム23の両端には、苗載せ台を支持する支持ステー30,30が立設されており、支持ステー30,30間には連動軸57が回動自在に支持されている。連動軸57には整地ロータ昇降用アクチュエータ54が取付けられたモータ・ポテンショベースが遊嵌されている。植付部フレーム23の中央部には、ローリング支軸31が取付けられており、昇降リンクが取付けられるリンクホルダ32がローリング支軸31に回動自在に嵌合している。リンクホルダ32の一方には植付部のローリングを制御するためのローリング制御用アクチュエータ42が取付けられており、整地ロータ昇降用アクチュエータ54はリンクホルダ32を挟んでローリング制御用アクチュエータ42とは反対側に配設されている。
(もっと読む)
乗用型田植機

【課題】フロートの揺動を電気的に検出する検出装置に、泥水などが飛散しないようにした乗用型田植機を提供する。
【解決手段】植付部15の幅方向に延設された植付部フレーム23の両端には、苗載せ台を支持する支持ステー30,30が立設されており、これら支持ステー30,30の中間部には、連動軸が架設されている。連動軸にはモータ・ポテンショベース59が遊嵌されていると共に、モータ・ポテンショベース59の機体後方側にはフロート揺動角検出ポテンショメータ55が取付けられている。フロート揺動角検出ポテンショメータ55のアーム76は、検知フロート16aの先端部と検出リンク56を介して連結されており、フロート揺動角検出ポテンショメータ55は、検出リンク56によって検知フロート16aの揺動を検出している。
(もっと読む)
移動農機
【課題】機体後部にリンク機構を介して作業機を昇降自在に連結してなる農業用トラクタや乗用型田植機等の移動農機において、隣接する作業列に対する作業機の作業開始位置を的確且つ簡単に位置合わせできるようにする。
【解決手段】昇降操作具17を上げ操作して機体後部に連結した作業機6を最上昇位置まで上昇させた状態で機体を旋回させる際、前輪2の操舵角を検出するポテンショメータ43が減少により機体の旋回終了を検出した時は、作業機6を最上昇位置から所定の高さ位置まで自動的に下降させてその姿勢を保持した後、前記昇降操作具17の下げ操作により作業機6を作業位置まで下降させるように制御装置31を構成した。
(もっと読む)
アウタチューブ保持構造
【課題】アウタチューブ保持構造において、錆や塵埃による機能低下を防止すると共に、部品点数を削減する。
【解決手段】アウタチューブ14の端部に、ピン18を設ける一方、アウタチューブ14の保持部材19に、ピン18を抜き差し可能な挿入孔19aを形成し、さらに、ピン18の側面に、抜止め突起18aを設ける一方、挿入孔19aの縁部に、抜止め突起18aの通過を許容する切欠き部19bを形成し、アウタチューブ14が所定の配索方向を向く状態では、抜止め突起18aと切欠き部19bの位置がピン18を中心として所定角度ずれることにより、ピン18の抜き差しが規制され、抜止め突起18aと切欠き部19bの位置が一致するように、ピン18を中心としてアウタチューブ14の向きを変更することにより、ピン18の抜き差しが許容される。
(もっと読む)
コンバイン
【課題】単純な操作により自動昇降制御を行うために、刈取作業中に誤操作をしてしまい未刈り穀稈を踏み倒す可能性があった。
【解決手段】自動昇降指令する自動昇降操作手段(20)を設け、制御手段(21)は、自動昇降操作手段(20)の操作を入力中に前処理操作検出手段(22)による昇降操作レバー(11)操作を入力すると、前処理高さ検出手段(25)の入力に基づいて前処理部(5)が設定目標位置まで自動昇降するように、昇降駆動手段(4)を昇降操作レバー(11)の操作方向に駆動制御する。
(もっと読む)
歩行型管理機
【課題】耕耘作業時に泥土の持ち回りが多くなる逆転爪に対応するロータリカバーの後側内面に泥土が詰まって付着し、エンジンの馬力ロスを生じると共に付着した泥土の除去作業に手間が掛かるといった問題点を解消する。
【解決手段】逆転爪6bの上方を覆うロータリカバー18の後側部位Eを、側面視で後方に行くほど逆転爪6bの回転軌跡最外周Tに対する間隔Sが広くなるように構成することによって、耕耘作業時に泥土の持ち回りが多くなる逆転爪6bの取り付け位置に対応するロータリカバー18の後側内面への泥土の詰まりと付着防止を図り、且つ当該泥土の後方への適度な排出を可能にした。
(もっと読む)
コンバイン
【課題】穂先の扱深状態を扱深さ移動方向視認用マークによって視認し易くし、扱深さ操作方向視認マークにより扱深手動スイッチの視認操作を行い易くし、手動による扱深調整を適切に行うことができるコンバインを提供する。
【解決手段】前処理部で刈取られた穀稈を、扱深手動スイッチの浅扱ぎ側及び深扱ぎ側への操作によって扱深搬送部を作動させて扱深調整をし、脱穀入口42に適正扱深で供給搬送させるコンバインであって、前記脱穀入口42に、搬送されてくる穀稈の穂先位置に対して浅扱ぎ方向と深扱ぎ方向とを運転部7より視認可能な扱深さ移動方向視認用マーク45を表示すると共に、扱深手動スイッチには、浅扱ぎ操作状態と深扱ぎ操作状態とを扱深さ移動方向視認用マーク45と同じ態様で視認可能に表す扱深さ操作方向視認マークを表示した。
(もっと読む)
操向制御装置を備えたコンバイン
【課題】ブレーキターンモードでの作業時、圃場の一部分だけ湿田になっている場合に減速ターンモードにするためには旋回モード選択手段でブレーキターンモードから減速ターンモードに切り替えるしか方法がなかった。
【解決手段】減速ターンモードとブレーキターンモードとを選択する旋回モード選択手段31aと、運転部6に設けた操向レバー11と、旋回モード選択手段31aであらかじめ選択された旋回モードにしたがって操向レバー11の左右傾動操作により機体を左右に操向制御する操向制御装置を備えたコンバインにおいて、操向レバー11に旋回モード切替手段23を設け、操向制御装置は、旋回モード選択手段31aによりブレーキターンモードを選択中に旋回モード切替手段23を操作すると、一時的に旋回モードを減速ターンモードに切り替える。
(もっと読む)
移植機
【課題】走行機体の側部に前後方向に延設される苗移送装置を備え、該苗移送装置の下方に予備苗載台を配置した移植機において、苗移送装置の下方の予備苗載せ台に予備苗、空箱、または苗掬い板を載置する際や、取り出す際に苗移送装置に邪魔されることなく作業を行うことができる移植機を提供する。
【解決手段】前記苗移送装置と苗移送装置下方の予備苗載せ台とが上下に重合する状態と、苗移送装置に対して予備苗載せ台が機体内方に変位した状態とに相対位置変更可能にする。
また、移送装置に対して苗移送装置下方の予備苗載せ台を機体内方へ移動させることで、苗移送装置と苗移送装置下方の予備苗載せ台とを左右方向に相対的に変位させる。
(もっと読む)
歩行型管理機
【課題】耕耘装置の上方を覆う耕耘カバーが周辺物等との接触により破損しても、耕耘カバー自体を交換することなく安価に修理が行なえるようにする。
【解決手段】耕耘カバー18の左右両端部を、その中央部18cに対して段差状に形成することによって、耕耘カバー18の左右両端部のみならず、該耕耘カバー18全体の剛性を向上させ、更に周辺物等との接触によりキズや破損が生じ易い耕耘カバー18の左右両端部に、合成樹脂製の保護部材38L,38Rを着脱自在に取り付けることによって、この保護部材38L,38Rにキズや破損が生じた場合には、容易に交換できるようにすると共に耕耘カバー18全体の軽量化を図った。
(もっと読む)
401 - 410 / 1,502
[ Back to top ]