
シンフォニアテクノロジー株式会社により出願された特許
141 - 150 / 1,111
水需要予測システム
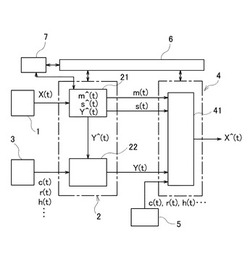
【課題】システム負荷を減らしても季節変動を的確に捉えた予測を可能とする水需要予測システムを提供する。
【解決手段】配水量X(t)を1週間周期で繰り返す時刻成分s(t)、季節変動を表わす傾向成分m(t)に分解するための解析部21と、解析対象期間の配水量実績値X(t)を時系列データとして蓄積する配水量実績値蓄積部1とを具備し、解析部21が配水量実績値を入力し、時刻成分を除去して傾向成分を求める処理と、傾向成分を時間tを変数とする季節変動近似式で表現することによって傾向成分の回帰係数を求める処理とを行うように構成するとともに、解析部21から時刻成分および傾向成分を備えた予測モデル式を取得し配水量予測値X^(t)を算出する配水量算出部41を更に具備し、配水量算出部で、時刻成分の周期Tを超えて設定されたモデル更新期間の間、同じ季節変動近似式を傾向成分に用いて繰り返し配水量予測値を算出するようにした。
(もっと読む)
速度制御装置、車両衝突試験装置

【課題】複数のダイナモをそれぞれ個別のインバータで駆動制御する速度制御装置として、制御応答性の向上を実現し、ハンチングを防止・抑制可能なものを提供する。
【解決手段】負荷Lに接続した第1ダイナモメータ1と、第1ダイナモメータ1を速度制御する第1インバータ3と、第2ダイナモメータ2と、第2ダイナモメータ2をトルク制御する第2インバータ4と、速度指令に対して微分処理を行う微分処理手段5と、微分処理手段5によって算出した加速度に所定の慣性を乗算して加速トルクを算出する加速トルク算出手段6と、加速トルク算出手段6で算出した加速トルクをダイナモメータの台数及び容量に応じて分配する加速トルク分配手段7とを備え、加速トルク分配手段7により分配された加速トルクに応じたトルク指令に基づいて第2ダイナモメータ2を第2インバータ4によりトルク制御する構成とした。
(もっと読む)
ロボットアーム型搬送装置
【課題】搬送対象物を保持するエンドエフェクタの大形化やセンサの損傷、搬送効率の低減を伴うことなく、搬送対象物の保持状態を適切に検出可能なロボットアーム型搬送装置を提供する。
【解決手段】搬送対象物Wを保持する第一のリンク21を含む複数のリンク21・22・23を関節部24・25・26を介して水平面内で回動可能に接続して構成されるアーム機構2と、アーム機構2を構成する複数のリンク21・22・23のうち第一のリンク21よりも基端側のリンク22に取り付けられ、取り付け位置に応じて定まる検出位置Seに搬送対象物Wがあることを検出するセンサ3とを有し、センサ3を取り付けたリンク22に対し第一のリンク21が近づく方向に関節部24を回動駆動した場合に第一のリンク21に正規に保持される搬送対象物Wが検出位置Seを通過して検出できるように、センサ3の取り付け位置が設定されている。
(もっと読む)
エンジン始動制御装置及びこれを搭載した産業車両
【課題】寒冷雰囲気、アイドリングストップ(オートスタートも含む)によりバッテリーの初期電圧が低下した状況でエンジン始動を行おうとする際でも、エンジン始動が可能なエンジン始動制御装置及びこれを搭載した産業車両を提供する。
【解決手段】エンジンを備えた装置に搭載され、スタータ入力スイッチ2を投入状態とすることにより、バッテリー1からスタータモータ5に通電し、当該スタータモータ5を駆動させてエンジン始動をなすために用いられるエンジン始動制御装置3において、前記バッテリー1の初期電圧が低下した状況でエンジン始動を行う際、前記スタータ入力スイッチ2が投入状態とされたことによる当該スタータ入力スイッチ2の通電電圧を検出し、前記検出された通電電圧の値がしきい値未満である状態の継続が一定時間未満の場合は前記スタータモータ5を駆動させ、一定時間以上の場合は前記スタータモータ5を駆動させない。
(もっと読む)
リニアモータおよびリニアモータの製造方法
【課題】内部の鉄心部を薄型化しつつ漏れ磁束による損失の少ない可動子を有するリニアモータを提供する。
【解決手段】一次側磁界発生部材としての固定子2、3と、二次側磁界発生部材としての可動子4とを具備したリニアモータであって、可動子4が、複数の鋼板を積層した鉄心部と、それらを連結する連結部とから構成され、連結部が樹脂によって形成されているとともに、固定子2、3が可動子4を挟んで2つ設けられ、それらに挟まれる部分が板状になるように可動子4が形成され、2つの固定子2、3のそれぞれが可動子4を挟んで互いに対称な位置に等ピッチで複数の第1の歯を具備し、可動子4を構成する鉄心部が等ピッチで複数の第2の歯を備え、複数の第2の歯が各々対応する固定子2、3の第1の歯と対向するように一体的に形成されるように構成した。
(もっと読む)
電磁制振装置、電磁制振制御プログラム
【課題】上位コンピュータから蛇行量が提供されない使用環境下であっても、専用のエッジ位置検出センサや蛇行量検出機器を必須の構造とすることなく、通常の姿勢で走行する鋼板の振動は勿論のこと、幅方向に蛇行して走行する鋼板の振動を適切に抑制することが可能な電磁制振装置を提供する。
【解決手段】電磁石対2を鋼板Sの幅方向に複数並べ、制御部4によって各電磁石対2の電磁石2A,2B間を走行する鋼板Sの振動を抑制する電磁制振装置1において、電磁石対2に付帯させたセンサのオン・オフ状態の切替に基づいて鋼板Sの疑似変位量を算出する疑似変位量算出手段と、疑似変位量に基づいて鋼板Sの疑似エッジ位置を算出する疑似エッジ位置算出手段と、疑似エッジ位置に基づいて電磁石2A,2Bに流す電流量を個別に制御する電流量制御手段とを備えた制御部4を適用した。
(もっと読む)
ワークの中心位置合わせ装置
【課題】回転動作を停止させることなく回転動作中にワークの中心位置を回転軸の中心に合わせることが可能な位置合わせ装置を提供する。
【解決手段】ワークWを載せる載置台21と、載置台21の下側に配置され且つ載置台21を平面上で直交する2方向に移動させるXYステージ22と、XYステージ22を駆動させるX軸駆動部6,Y軸駆動部7と、XYステージ22を下方から回転可能に支持しXYステージ22の原点に一致する回転軸と、回転軸を回転駆動させる回転軸駆動部8と、ワークWのエッジ位置を検出するエッジ位置検出手段3とを備え、制御部4によって、回転軸を回転駆動させながらエッジ位置情報及び回転角度情報に基づきワークWの中心位置を回転軸の中心に一致させるために要するXYステージ22の移動量を算出し、移動量に基づいてX軸駆動部6又はY軸駆動部7の少なくとも何れか一方を作動させるようにした。
(もっと読む)
搬送装置
【課題】補正前の軌道の特性を損なうことなく、軌道の始点及び終点と目標始点及び目標終点との位置ズレに応じて設定軌道を補正する搬送装置を提供する。
【解決手段】予め設定された設定軌道Ptを用いて搬送制御するにあたり、設定軌道Ptの始点S及び終点Eが位置ズレしている場合に設定軌道Ptを補正する。設定軌道Ptの補正は、始点Sが目標点S’と一致するように終点Eを基準として設定軌道Ptを拡大又は縮小して補正する第一の補正処理と、第一の補正処理後の終点Eが目標点E’と一致するように第一の補正処理後の始点S’を基準として第一の補正処理で得られる軌道Pt’を拡大又は縮小して補正する第二の補正処理と、を実行することで行う。
(もっと読む)
電動アクチュエータ
【課題】一方の系統で障害が発生した時点でも、障害が発生してない系統を作動させて最小ストローク及び最大ストロークを確保することができ、信頼性の低下を防止・抑制可能な電動アクチュエータを提供する
【解決手段】ロッドRの軸方向に進退動作可能な第1可動部A2を有する第1系統Aと、第2モータB1、ロッドRの軸方向に進退動作可能な第2可動部B2を有する第2系統Bとを備え、各可動部A2,B2を、共通のロッドRの軸方向に進退動作可能に配置して、これら可動部A2,B2が最も相寄った基準位置(S)にある状態を最小ストロークSt(d)とし、何れか一方の系統が正常に作動しない故障発生時において他方の系統の可動部が基準位置(S)を境に正逆方向の何れにも最大ストローク長St(d+α)と最小ストローク長St(d)の差分αだけ移動できる構成を採用した。
(もっと読む)
ファン装置
【課題】モータに接続されるケーブル類を風洞内の空気流に曝されることがなく静粛性が高い構造のファン装置を提供する。
【解決手段】風洞3の内側に支持体5によって宙吊り状態に保持されたハウジング4内にモータ6を配置し、モータ6によって駆動される動翼7により生じる空気流を風洞3とハウジング4との間に形成される通風空間Aを通じて送風するファン装置1において、ハウジング4と風洞3に形成される各貫通孔411,31と支持体5の肉厚内を貫通させて形成したケーブル挿通孔51を連通させて、これらの各孔411,51,31を通じてモータ6に接続されるケーブル類62を外部へ引き出す構成とした。
(もっと読む)
141 - 150 / 1,111
[ Back to top ]