
山形カシオ株式会社により出願された特許
11 - 20 / 65
ノズル種類認識制御方法及び部品搭載装置
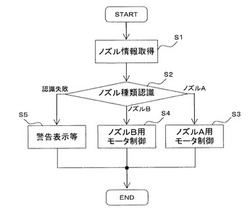
【課題】ノズル種類認識制御方法及び部品搭載装置において、部品搭載精度を高める。
【解決手段】部品を基板上に自動搭載する部品搭載装置において、作業ヘッドに装着されて部品を吸着する吸着ノズルの種類を認識するノズル種類認識制御方法であって、上記作業ヘッドに装着された状態における吸着ノズルの種類を認識する認識工程(S1,S2)と、上記認識した吸着ノズルの種類に応じて上記吸着ノズルの変位を制御する制御工程(S3,S4)とを含むようにする。
(もっと読む)
テープフィーダ及びそれを用いた部品搭載装置

【課題】電子部品を保持するテープを簡単かつ安価な構成で所定量ずつ送り出して部品供給口に供給するテープフィーダ及びそれを用いた部品搭載装置を提供する。
【解決手段】先ずスプロケット61を回転駆動するステッピングモータを所定のセンサにより原点復帰させる。 次に微小移動用のパルス数でステッピングモータを駆動してスプロケット61のジョグ送りを行い基準センサ63−1の歯検出領域69にスプロケット61の歯62が入ったところでステッピングモータ停止させる。続いて部品搭載装置からテープフィーダにスプロケット61の歯62の配設ピッチ4mmの半分2mmの部品テープ送りの指示が出される。スプロケット61が歯62の配設ピッチの1/2回転すると補助センサ63−2の歯検出領域69にスプロケット61の歯62が入って歯検出信号が出力され、送りが停止される。
(もっと読む)
部品搭載装置
【課題】部品搭載精度を高めることのできる部品搭載装置を提供する。
【解決手段】空圧回路16aを有し回転する主軸16及び電子部品を吸着する吸着ノズルを有する作業ヘッド15と、伝達部25を介して駆動源に接続され少なくともZ軸方向に作業ヘッド15を駆動するヘッド支持部17とを備える部品搭載装置において、作業ヘッド15は、ヘッド支持部17を押圧する支持部押圧スプリング18を有する構成とする。好ましくは、支持部押圧スプリング18は、下端が主軸16に対し位置決め固定され、上端がヘッド支持部17を押圧する構成とする。
(もっと読む)
テープフィーダ
【課題】簡単かつ安価な構成で厚さや強弱の異なるトップテープを容易に巻き取ることのできるテープフィーダを提供する。
【解決手段】兼用モータ31は減速二枚ギア12と18を介してスプロケット6と排出ギア16とを駆動する。兼用モータ31の回転トルクは本体テープ4の送りに適するように設定される。排出ギア16に使用済みのトップテープ5を介して圧接係合する補助排出ギア17の圧接力は、補助排出ギア17の回転支持軸22に一端が係合し、他端が固定支持軸21に回動自在に支持される回動部材32と、この回動部材32を介して補助排出ギア17を排出ギア16側に付勢する螺旋バネ23と、この螺旋バネ23の付勢力を強弱調整する3個の螺旋バネ係止ピン25によって生成される。
(もっと読む)
部品搭載装置及びそのティーチング操作方法
【課題】技術力がなくティーチングの操作も習得していないオペレータでも簡単にティーチング操作が出来る部品搭載装置及びそのティーチング操作方法を提供する。
【解決手段】オペレータはティーチング用表示画面をみながら基板の機種を入力し(S1)、STARTボタンを押す(S2)。CPU35は、生産指示書の機種データファイルによりレール幅調整(M1)を行い、マークマスタファイルにより基板マークの認識ティーチング(M2)を行い、ノズルリストファイルとノズルマスタファイルによりノズルの有無及び先端高さ位置のティーチング(M3)を行い、フィーダリストファイルと部品マスタファイルによりピック点ティーチングを行ってから基板ユニットの生産を開始する。
(もっと読む)
作業ヘッドの移動制御方法と部品実装装置
【課題】作業ヘッドを種々の速度パターンでかつ任意の移動距離を移動させてデータテーブルを作成し、生産能力と搭載精度を高めることのできる、作業ヘッドの移動制御方法と部品実装装置を提供する。
【解決手段】作業ヘッドを、XYZ軸方向又はZ軸周りの回転方向に種々の速度パターンかつ任意の移動距離Lを移動させて、作業ヘッドの位置、速度等の移動データを記憶し、この移動データを集計して、作業ヘッドが種々の速度パターンでかつ任意の移動距離を移動する際に、移動途中の任意の位置から停止までの時間を推測すべくデータテーブルを作成し、このデータテーブルに基づき、作業ヘッドを最適な移動条件で移動させる。
(もっと読む)
基板マーク撮像方法及び部品搭載装置
【課題】基板マーク撮像方法及び部品搭載装置において、基板マークの良好な画像を安価で取得する。
【解決手段】基板上3の半田レベラーによる基板マーク4を撮像手段1により撮像する基板マーク撮像方法であって、基板マーク4を斜光照明(1本線)し、該斜光照明の正反射率を高めるように、すなわち正反射光(2本線)を取り入れるように、撮像手段1の撮像視野内の周縁において基板マーク4を撮像するようにする。
(もっと読む)
部品実装装置
【課題】部品供給装置に搭載されたアクチュエータの識別情報に基づき、複数の電源の中からいずれか1の電源を選択して電源を供給可能とする。
【解決手段】部品実装装置10は、一括台車30側に設けられてアクチュエータ39の識別情報が記憶されたコネクタ32Aと、該コネクタ32Aからの識別情報に基づき、アクチュエータ39を駆動すべく実装装置本体10Aに内蔵された複数の電源34,36の中からいずれか1の電源を選択する制御CPU37と、該制御CPU37からの選択指令に基づき、1の電源からの電力を一括台車30に供給すべく電源経路を切り替えるリレーコイル42及びリレー接点42a等を備えている。
(もっと読む)
部品実装装置
【課題】複数の異なる波長の光の反射光を波長毎に分離可能な撮像カメラを用い、部品の位置、形状、及び傾きを高精度で検出する。
【解決手段】作業ヘッド20に吸着された部品24に緑色光を照射する第1の照明部26と、緑色の光とは異なる波長の赤色光を照射する第2の照明部28と、第1と第2の照明部から略同時に照射された緑と赤の反射光を取り込み、各反射光を波長毎に分離して画像信号を出力する撮像カメラ22と、撮像カメラ22から出力された画像信号を波長毎に分離して画像処理し、作業ヘッド20の中心軸に対する部品24の位置、形状、及び傾きを演算する制御部50を備えている。
(もっと読む)
部品供給装置
【課題】トレイに格納された部品の残数とその格納位置を設定できるようにする。
【解決手段】この部品供給装置30は、部品の残数と格納位置を、文字、数字、又は記号により入力する入力装置32と、入力装置32からの入力情報を取り込み、部品の残数と格納位置を演算する制御部31と、制御部31からの演算結果に基づき、部品の残数と格納位置を文字、数字、又は記号により表示する表示装置33とを備えている。
(もっと読む)
11 - 20 / 65
[ Back to top ]