
株式会社ワコーにより出願された特許
11 - 20 / 34
力検出装置
【課題】単純な構造により、力とモーメントとを区別して検出する。
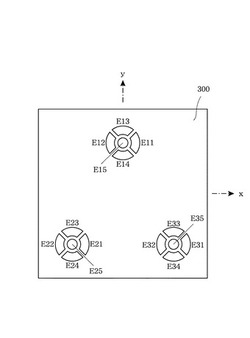
【解決手段】板状の支持体300の上面の3箇所に、それぞれ5組ずつの固定電極群E11〜E15,E21〜E25,E31〜E35を配置する。この3箇所の固定電極群の上方にそれぞれ変位電極として機能する円盤状のダイアフラムを配置し、その周囲を支持体300上に固定する。3枚のダイアフラムの上面中央部に、それぞれ上方に伸びる柱状体を接合し、この3本の柱状体の上端に、検出対象となる力を受ける受力体を取り付ける。受力体に力やモーメントが作用すると、3本の柱状体が変位し、各ダイアフラムに撓みが生じる。各固定電極E11〜E35と対向するダイアフラムとによって構成される15組の容量素子の静電容量値の変化に基づいて、受力体に作用した各座標軸方向の力Fx,Fy,Fzと、モーメントMx,My,Mzのすべてが検出できる。
(もっと読む)
力検出装置

【課題】単純な構造により、力とモーメントとを区別して検出する。
【解決手段】検出対象となる力を受ける受力体10の下方に支持体20を配置し、両者間に4本の柱状力伝達体11〜14を接続する。各柱状力伝達体11〜14の上下両端には、可撓性をもった接続部材を介挿し、受力体10が力を受けて変位したときに、柱状力伝達体11〜14が傾斜できるようにする。各柱状力伝達体11〜14と支持体20との接続部分には、それぞれ容量素子を備えたセンサ21〜24を配置し、各柱状力伝達体11〜14から支持体20へ伝達される力を検出する。センサ21〜24の検出値に基づいて、検出回路30が、受力体10に作用した力とモーメントとを区別して検出する。力Fx,Fy,Fzと、モーメントMx,My,Mzのすべてが検出できる。
(もっと読む)
力検出装置
【課題】 単純な構造で、他軸成分の干渉を排除し、各軸方向の力と各軸まわりのモーメントを独立して検出する。
【解決手段】 検出対象となる力を受ける受力体10の下方に支持基板20を配置し、両者間に4本の柱状体11〜14を接続する。各柱状体11〜14の上下両端には、可撓性をもった接続部材を介挿し、受力体10が力を受けて変位したときに、柱状体11〜14が傾斜できるようにする。各柱状体11〜14のX軸もしくはY軸方向への傾斜度およびZ軸方向への変位をセンサ21〜24で検出する。この検出結果に基づき、検出回路30が、力Fx,Fy,Fz、モーメントMx,My,Mzを求める。力Fxは、各柱状体のX軸方向への傾斜度に基づいて算出されるが、柱状体11,12のZ軸方向への変位に基づいて算出されたモーメントMyの値に基づいて補正され、My成分の干渉は排除される。
(もっと読む)
CV変換器
【課題】 シンプルな回路構成でジッターノイズ、高周波ノイズの低減を可能にするCV変換器を提供することである。
【解決手段】 計測しようとする装置の対電極に交流定電流を与え、対電極の両端の電圧をバランス調整して加算したものに、交流定電流を電圧に変換したものをさらに加算し、それをAM検波することにより、容量素子の容量の変化を電圧に変換するように構成されていることを特徴とするCV変換器が提供される。好ましくは、計測しようとする装置は、静電容量型センサである。
(もっと読む)
角速度センサ
【課題】 振動子から装置筐体への振動漏れを排除して検出精度を向上させる。
【解決手段】 主振動子210に可撓性の内側架橋部221,241を介して副振動子225,245を接続する。副振動子225,245は、可撓性の外側架橋部222,242を介して台座260に接続し、台座260を装置筐体280に固定する。内側架橋部221,241の上面に圧電素子X11〜X14を固定する。一部の圧電素子に交流電圧を供給して主振動子210を振動させ、主振動子210に作用したコリオリ力を別な圧電素子の発生電荷として検出し、角速度の検出値を求める。主振動子210から装置筐体280へ漏れ出る振動エネルギーは、副振動子225,245の運動により吸収される。外側架橋部222,242の上面にも圧電素子を設け、交流電圧を供給し、副振動子225,245を主振動子とは逆方向に運動させれば、振動漏れを更に低減できる。
(もっと読む)
角速度センサ
【課題】 外乱として作用する重力の影響を排除し、高精度な測定を行う。
【解決手段】
中央の振動子110を、可撓性をもった4本の架橋部121〜124によって、枠状の固定部材130に接続する。架橋部121〜124の上面には、圧電素子を設ける。駆動用圧電素子X12,X13に同位相の交流駆動信号を与え、振動子110をZ軸(紙面垂直)方向に振動させる。このとき、モニタ用圧電素子X12U,X13Uから得られるモニタ電圧の振幅が所定の基準振幅値に維持され、かつ、モニタ電圧の平均電圧値が0に維持されるように、交流駆動信号の振幅をフィードバック制御する。検出用圧電素子X11,X14から得られる電圧に基づいてX軸方向のコリオリ力を検出してY軸まわりの角速度を求め、検出用圧電素子Y11,Y14から得られる電圧に基づいてY軸方向のコリオリ力を検出してX軸まわりの角速度を求める。
(もっと読む)
力検出装置
【課題】 単純な構造により、力とモーメントとを区別して検出する。
【解決手段】 検出対象となる力を受ける受力体10の下方に支持体20を配置し、両者間に少なくとも2本の柱状力伝達体11,12を接続する。各柱状力伝達体11,12の上下両端には、可撓性をもった接続部材を介挿し、受力体10が力を受けて変位したときに、柱状力伝達体11,12が傾斜できるようにする。各柱状力伝達体11,12と支持体20との接続部分には、それぞれセンサ21,22を配置し、各柱状力伝達体11,12から支持体20へ伝達される力を検出する。センサ21,22の検出値に基づいて、検出処理部30が、受力体10に作用した力とモーメントとを区別して検出する。4本の柱状力伝達体を用いると、力Fx,Fy,Fzと、モーメントMx,My,Mzのすべてが検出できる。
(もっと読む)
角速度センサ
【課題】 外乱として作用する重力の影響を排除し、高精度な測定を行う。
【解決手段】 周囲が固定された可撓性基板200に、重錘体400を接合する。基板200の上面に電極D10〜D15を設け、固定基板100の下面に電極E10〜E15を設ける。重錘体400の下面に電極D10B,D15Bを設け、固定基板300の上面に電極E10B,E15Bを設ける。電極D10/E10間に交流電圧φ1を印加し、電極D10B/E10B間に逆位相の交流電圧φ2を印加して、重錘体400をZ軸方向に振動させる。このとき、電極D15/E15間、電極D15B/E15B間の静電容量をモニタし、交流電圧φ1,φ2の振幅をフィードバック制御する。電極D11/E11間、電極D12/E12間、電極D13/E13間、電極D14/E14間の静電容量により、X軸,Y軸方向のコリオリ力を検出し、角速度検出を行う。
(もっと読む)
角速度センサ
【課題】 小型かつ低価格でありながら、誤差の少ない信頼性の高い検出を可能にする。
【解決手段】 装置筐体30内に、2つの重錘体10A,10Bを収容し、それぞれを可撓性をもった接続部材20によって装置筐体30に接続する。各重錘体10A,10Bは所定の自由度をもって各座標軸X,Y,Zの方向に移動できる。重錘体10A,10B間は、可撓性をもった接続部材25によって相互接続する。各重錘体10A,10Bを互いに逆位相となるようにX軸方向に往復運動させた状態とし、所定の検出時において、各重錘体10A,10Bに作用したZ軸方向のコリオリ力をZ軸方向への変位として検出する。両重錘体10A,10Bに作用したZ軸方向のコリオリ力の差により角速度を求め、和により加速度を求める。
(もっと読む)
加速度センサの製造方法
【課題】重量を大きくすることができるとともに、ビームの長さを長くして検出感度を従来の加速度センサより向上させることができ、周波数特性及び耐衝撃性が良好であり、小型化が可能である加速度センサの製造方法を提供する。
【解決手段】マイクロ構造体からなるセンサ部1は、矩形の枠部11を有し、枠部11の中心部には円柱状の重錘体12が設けられている。この重錘体12は枠部11の各辺の中央部と、ビーム13,13,13,13により接続されている。そして、四角柱状の補助重錘体14,14,14,14が、ビーム13,13と枠部11の内周面とにより包囲される空間内に遊挿する状態で、重錘体12に連設してある。
(もっと読む)
11 - 20 / 34
[ Back to top ]