
レイセオン カンパニーにより出願された特許
141 - 150 / 244
取外し可能な航空力学的ミサイル安定化システム

低い飛行速度で飛行するミサイル100の取外し可能な航空力学的ミサイル安定化システム130を提供する。システム130はミサイル100に結合するように構成されているハウジング134を含んでいる、ハウジング134から外方向に延在する少なくとも1つのグリッドフィン136がある。特にグリッドフィン136はこれがハウジング134とミサイル100の縦軸110に対して横方向であるようにハウジング134から延在する。グリッドフィン136は複数の孔144を設けられている。孔144はハウジング134とミサイル100の縦軸110に平行である。結合器138は取外し可能にハウジング134をミサイル100に結合するように構成されている。使用方法も与えられる。 (もっと読む)
非連続共振位置フィードバックシステム
振動可動要素の位置を感知するためのシステム及び方法。本発明の位置センサは、この位置センサの第1の位置で可動要素の位置をサンプリングして、このサンプリングした位置に応じてサンプルを与えるための第1の構成体と、第1の位置のサンプルを使用して可動要素の他の位置を計算するための第2の構成体とを有する。例示的なアプリケーションでは、第1の構成体は、LED及びフォトダイオードを含み、可動要素は、長寿命の極低温冷却器のピストンである。プロセッサは、フォトダイオードからサンプルを受けて、可動要素の動きの方程式を解く。この動きの方程式は、P(t)=A・sin(ωt+θ)+Bである。ここで、P(t)=要素の位置、A=位置波形の振幅、B=位置波形のDCオフセット、ω=動作の角振動数、t=時間、θ=位置波形の位相、である。  (もっと読む)
(もっと読む)
ヒドロキシルアミンベースの段階燃焼式ハイブリッドロケットモータ
新規なロケットモータの組み立て構成が開示される。金属触媒存在下でアミン系酸化剤が分解されて、酸素リッチな高温ガス流が生じる。高温ガス流は、燃焼室内のマグネシウムベースの固体燃料を誘発するために使用される。ロケットモータの推力は、複数の点において調節される。このように、本設計では、性能に妥協することなく、IM準拠で、推力が調整可能であり、危険分類が低いロケットモータが提供される。  (もっと読む)
(もっと読む)
クライオクーラのスプリット撓みサスペンションシステム及び方法
2つの独立可動撓みシステムが単一の磁気構造全体に亘って分割されたクライオクーラ。パッケージのサイズを小さくし、外部からの力による片持ち式の部分の弛みへの耐性を高める。一連の同心的に配置された撓み接続シャフトが、2つの独立可動撓みアセンブリが単一のモータ全体に亘って分割されるように設けられている。また、一連のコネクタが、外側シャフトを通過するモータの前方側に設けられており、内側接続シャフトが干渉なくこの撓み部に装着されることを可能にする。一連の閉鎖接続部が、後方の撓みスタックに設けられており、アセンブリを形成し、干渉なく堅い機械的な接続を果す。 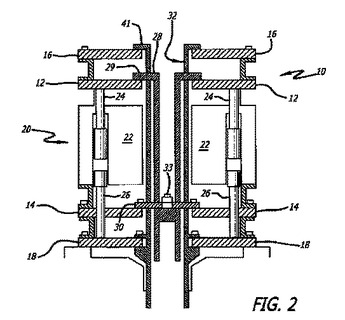 (もっと読む)
(もっと読む)
可動ピストン及び可動シリンダを備えたクライオクーラ
スターリングサイクルクライオクーラのような熱サイクルクライオクーラ(10)が、コンプレッサ(12)とディスプレーサ(14)との両方によって利用される単一の動作容積部(48)を有する。コンプレッサとディスプレーサとは、それぞれ可動部品を有し、一方が他方により囲まれている。部品の一方はピストン(20)であり、他方の部品が、シリンダ(20)の中心のボア(52)内を移動する。ピストンは、コンプレッサの構成要素であることができ、また、シリンダは、ディスプレーサの構成要素であることができ、逆もある。動作容積部は、シリンダに結合されたピストンと再生熱交換器との間のシリンダの部分に部分的に位置している。ピストンとシリンダとの移動は、ガス移送ライン又は流れ通路を使用することなく、動作ガスの圧縮又は膨張によって直接果されることができる。  (もっと読む)
(もっと読む)
2つのコイルの単一の磁気回路のモータを備えたスターリングサイクル極低温冷却器
通常の2つのモータのスターリングクライオクーラの磁気回路の一方を取り除く方法及びメカニズム。本発明のクーラは、2つの磁気ギャップにおいて磁束場を発生させるための磁気回路を備えたスターリングサイクルクライオクーラである。第1のコイルは、第1のギャップの磁束場中に配置されている。第2のコイルは、第2のギャップの磁束場中に配置されている。第2のコイルは、第1のコイルとは独立して動くように設けられている。特定の実施の形態では、第1のコイルは、コンプレッサコイルであり、第2のコイルは、ディスプレーサコイルである。これらコイルは、制御部からの信号に応じて、電気エネルギの第1及び第2の可変源でエネルギが与えられる。  (もっと読む)
(もっと読む)
多センサ処理

多センサ処理の方法は、第1のセンサシステムにおいて、第2のセンサシステムからトラックデータを受信すること、第1のセンサシステムからのトラックデータを第2のセンサシステムからのトラックデータと比較することであって、或る時間期間の間にトラックが第1のセンサシステムの視野内に存在することになるか否かを判断する、比較すること、第1のセンサシステムにおいて、トラックデータに基づいてトラックの予測品質を求めること、及び、当該トラックの予測品質をブロードキャストすることを含む。本方法は、第2のセンサシステムからトラックの予測品質を受信すること、並びに、第1のセンサシステムによって求められたトラックの予測品質、及び第2のセンサシステムから受信されたトラックの予測品質に基づいて第1のタスクのセットを決定することも含む。 (もっと読む)
キャリアの閉じ込めを改善するために複数の背面障壁層を有する半導体構造
その中に伝導チャネルを有するチャネル層20と、一対の分極生成層14、18と、一対の分極生成層間に配置されるスペーサ層とを有する半導体構造。分極生成層は共通の所定の方向に沿って分極場を作り出す。一対の分極生成層のうちの各層はInGaN;InAlGaN;又は四元InxAlyGa1−x−yNとすることができ、xはy/2以上である。その分極生成層は共通の所定の方向に沿って分極場を作り出し、チャネル層が受ける全分極場を強め合うように大きくし、伝導チャネル内のキャリアの閉じ込めを強化する。 (もっと読む)
非冷却LWIR検出器に組み合わされた可視すなわちSWIR検出器を有するデュアル・バンド撮像装置
デュアル・バンド撮像装置は、読取り回路(ROIC)へ結合された第1波長の光を吸収する放射吸収層を含み、また放射吸収層を通じて延伸する対応の開口を介してROICへ結合された第2波長の光を検出する少なくとも1つの放射検出器を含む。  (もっと読む)
(もっと読む)
アンテナビームの方向を制御するための方法およびシステム
【解決手段】
実施例において、アンテナビームの方向を制御するシステムは、位置識別器、方位センサ、および、アンテナビーム・コントローラを含む。位置識別器は、送信アンテナの位置を示すアンテナの位置を計測する。送信アンテナはアンテナビームを発生させる。方位センサは、送信するアンテナの方位を示す送信アンテナの方位を測定する。アンテナビーム・コントローラは:目標の受信アンテナを記述した目標データにアクセスし(目標データは、送信ンテナに対応する受信アンテナの位置を含む)、送信アンテナの位置、送信アンテナの方位および目標データからの偏差、の値を計算し、かつ偏差の値を下げるためにアンテナビームの方向を調整する。 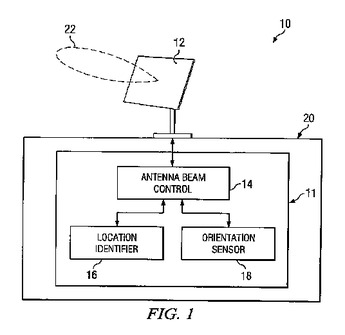 (もっと読む)
(もっと読む)
141 - 150 / 244
[ Back to top ]