
ハリス コーポレイションにより出願された特許
21 - 30 / 287
フィルタ装置
フィルタ装置は基板(302)と基板の第1表面に設けられた複数の水平ギャップ閉鎖アクチュエータ(GCA)装置とを有する。複数のGCA装置は1つ以上のGCAバラクタ(700)を有する。複数の水平GCA装置の各々は、少なくとも1つのドライブくし形構造(602a、602b、702a、702b)と、少なくとも1つの入力/出力(I/O)くし形構造(616a、616b、716a、716b)と、ドライブくし形構造及びI/Oくし形構造に互いに入り込んだ少なくとも1つのトラスくし形構造(604、704)とを有する。トラスくし形構造は、トラスくし形構造及びドライブくし形構造の間に印加されるバイアス電圧に基づいて、少なくとも第1の嵌合位置及び第2の嵌合位置の間の移動軸方向に沿って動くように形成されている。  (もっと読む)
(もっと読む)
コアおよびクラッドの屈折率整合を提供する屈折率整合エラストマー固体層を有する光ファイバスイッチ、ならびにその方法
光ファイバスイッチ(230)は、それぞれが第1および第2の端面(203、204)を有する第1および第2の角度付き光ファイバ(231、232)を有する。第1および第2の角度付き光ファイバ(231、232)の各々は、コア屈折率(n1)を有するコア(235、236)、および前記コアを取り囲み、前記コア屈折率とは異なるクラッド屈折率(n2)を有するクラッド(237、238)を有する。光ファイバスイッチ(230)は、さらに、第1の屈折率整合エラストマー固体層(240)であって、前記第1の端面(203)に結合された隣接面、および該隣接面とは反対の、繰り返し可能に、光学的に前記第2の端面(204)に結合される先端面を有する第1の屈折率整合エラストマー固体層を有する。第1の屈折率整合エラストマー固体層(240)は、前記コアおよびクラッドの屈折率に整合する屈折率プロファイルを有する。光ファイバスイッチ(230)は、さらに、少なくとも一つのアクチュエータ(255)を有し、第1および第2の角度付き光ファイバ(231、232)は、結合位置と非結合位置の間で相対的に動かされる。 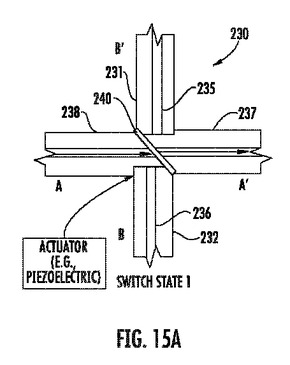 (もっと読む)
(もっと読む)
硬化性の屈折率整合エラストマー固体層を有する光装置を製造する方法
光装置を製造する方法は、光導波管装置(31)の端面(33)に、硬化性の屈折率整合エラストマー固体層(40)用の少なくとも一つの前駆体を設置するステップを有する。前記光導波管装置(31)は、コア屈折率(n1)を有するコア(35)、および前記コアを取り囲み、前記コア屈折率とは異なるクラッド屈折率(n2)を有するクラッド(37)を有する。当該方法は、さらに、前記少なくとも一つの前駆体を硬化して、前記端面(33)に、少なくとも前記コア(35)の屈折率と整合する屈折率を有する屈折率整合エラストマー固体層(40)を形成するステップを有する。  (もっと読む)
(もっと読む)
屈折率整合エラストマー固体層を有する光ファイバスイッチおよびその方法
光ファイバスイッチ(230)は、それぞれが第1および第2の端面(203、204)を有する第1および第2の角度付き光ファイバ(231、232)を有する。第1および第2の角度付き光ファイバ(231、232)の各々は、コア屈折率(n1)を有するコア(235、236)、および前記コアを取り囲み、前記コア屈折率とは異なるクラッド屈折率(n2)を有するクラッド(237、238)を有する。光ファイバスイッチ(230)は、さらに、第1の屈折率整合エラストマー固体層(240)であって、前記第1の端面(203)に結合された隣接面、および該隣接面とは反対の、繰り返し可能に、光学的に前記第2の端面(204)に結合される先端面を有する第1の屈折率整合エラストマー固体層を有する。第1の屈折率整合エラストマー固体層(240)は、少なくとも前記コア(235、236)の屈折率に整合する屈折率を有する。光ファイバスイッチ(230)は、さらに、少なくとも一つのアクチュエータ(255)を有し、第1および第2の角度付き光ファイバ(231、232)は、結合位置と非結合位置の間で、相対的に動かされる。  (もっと読む)
(もっと読む)
衝突回避スキームを実行するロボット装置及びそれに関連する方法
ロボット装置は、衝突回避スキームを実行し、第1ロボットマニピュレータと、第1の予め計画された実際の経路に沿った移動のために第1ロボットマニピュレータを制御する第1制御器とを有する。第2制御器は、第2の予め計画された意図された経路に沿った移動のために、第2ロボットマニピュレータの移動を制御し、第1ロボットマニピュレータとの可能性のある衝突の決定に基づいて且つ第1の予め計画された実際の経路についての予めの知識を伴わずに、の第1の予め計画された実際の経路から離れた回避経路に移動するように、第2の予め計画された意図された経路から外す。  (もっと読む)
(もっと読む)
メータ検針無線メッシュネットワークにおけるアドレスストリッピング及び関連するシステム
検針システムは、アクセスポイントと通信する無線検針ノードを有する検針無線メッシュネットワークを含む。各無線検針ノードは、関連するアドレスを有する。検針無線メッシュネットワークは、連続する中間ノードと所与のノードとのアドレスに基づき、アクセスポイントから連続する中間ノードを介し所与のノードへの与えられたダウンストリームルートを規定するよう構成される。連続する各中間ノードにおける各自のアドレスは、アクセスポイントから所与のノードへの与えられたダウンストリームルートに沿ってデータをルーティングする間にストリッピングされる。  (もっと読む)
(もっと読む)
メータ検針無線メッシュネットワーク内のノードのネットワークアドレスフィールド及び関連するシステム
検針システムは、アクセスポイントと通信する無線検針ノードを有する検針無線メッシュネットワークを有する。各無線検針ノードは、関連するアドレスを有する。検針無線メッシュネットワークは、各自のアドレスの長さフィールドと値フィールドとに基づき、各無線検針ノードのネットワークアドレスフィールドを決定し、ネットワークアドレスフィールドを用いて無線メッシュネットワーク内で通信するよう構成される。  (もっと読む)
(もっと読む)
メータ検針無線メッシュネットワークへの新たなノードの登録及び関連するシステム
検針システムは、アクセスポイントとの通信について既に登録された既登録ノードと、アクセスポイントとの通信についてまだ登録されていない未登録ノードとを有する検針無線メッシュネットワークを含む。検針無線メッシュネットワークに新規なノードを登録するため、新規なノードは、登録リクエストメッセージを送信する。登録リクエストメッセージを受信した近隣の既登録ノードは、新規なノードにレスポンスを返送し、登録リクエストメッセージを受信した近隣の未登録ノードは、新規なノードにレスポンスを返送せず、また近隣の既登録ノードにもレスポンスを送信しない。新規なノードは、レスポンスの評価に基づき既登録ノードを選択肢、ネットワークに追加するため、選択された既登録ノードを介しアクセスポイントに通信する。 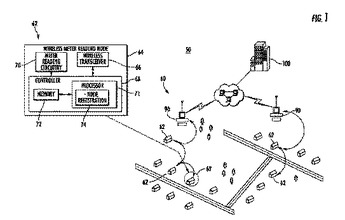 (もっと読む)
(もっと読む)
セラミック基板内の埋込み式トロイダル変圧器

【課題】従来技術の問題を解決する。
【解決手段】セラミック基板内に変圧器(118)を形成する方法。方法は、非焼成セラミック基板(100)内に定められる非焼成セラミックトロイダルコア領域(120a,120b)についての複数の巻線を含む少なくとも1つの伝導性コイル(119a,119b)を形成するステップを含み得る。方法は、セラミック基板内に少なくとも部分的に埋設される伝導性コイルを備える一体的なセラミック基板構造を形成するために、非焼成セラミックトロイダルコア領域(120a,120b)、非焼成セラミック基板(100)、及び、伝導性コイル(119a,119b)を同時焼成するステップも含む。
(もっと読む)
光/ワイヤレス・ハイブリッド通信を提供する通信システム及び方法

【課題】光ファイバ通信の利点とワイヤレス通信の利点とを効果的に用いる通信システムを提供する。
【解決手段】通信システム10は、光ファイバ11の縦側面に接続された少なくとも1つの光−ワイヤレス機器12を有する。光−ワイヤレス機器12は、光パワを電力へ変換する光ファイバパワユニットと、それによって電力供給されるワイヤレス通信ユニットとを有する。光−ワイヤレス機器12は、光ファイバパワユニット及びワイヤレス通信ユニットを光ファイバ11の縦側面へ取り付ける基板を有する。ワイヤレス通信ユニットは、無線周波数送信器と、該送信器を光ファイバ11の縦側面へ接続する信号光格子とを有する。光ファイバ11の縦側面に沿って反対方向に延びる第一の部分及び第二の部分を有するアンテナが設けられる。
(もっと読む)
21 - 30 / 287
[ Back to top ]