
ノヴァテル・インコーポレイテッドにより出願された特許
1 - 7 / 7
GPS受信機を備えた地震測定システム
【課題】地震データ収集システムに関連し、特に、3次元地震データを収集して解析するためのシステムを提供する。
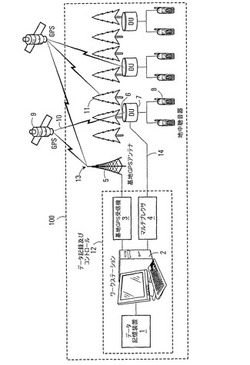
【解決手段】3次元地震データを解析するためのシステムは、複数のデジタイザ装置(7)(各々が一式の地中聴音器(8)を備えている)、データ記録及びコントロールセンター(12)、関連するアンテナ(5)を有する基地GPS受信機、及び基地GPS受信機により提供される追跡支援情報を使用して、GPS衛星(9)信号を取得して追跡する、それぞれのデジタイザ装置(7)に設けられた低電力のスレーブGPS受信機(6)を備える。スレーブGPS受信機(6)は、追跡支援情報を使用して樹葉(11)による天蓋状の覆いの存在などのサイトにおける条件のために受信機で比較的弱くなっている場合があるGPS衛星信号を取得して追跡する。システムは、長時間にわたってスレーブGPS受信機(6)によって提供された距離情報を処理する。
(もっと読む)
フラクタルループを含む放射構造を有する漏洩波アンテナ
アンテナが、GPS、GLONASS、GALILEO及びOmniSTAR(商標)を含む種々の衛星測距システムからのRF信号を受信するために提供される。アンテナ構成は、フラクタルループで終端されたマルチアームスパイラルスロットの放射構造を有する。漏洩波マイクロストリップスパイラル給電ネットワークが、アンテナの放射構造を励起するために使用される。アパーチャ結合スロットの固定ビームフエーズドアレーは、右回り偏光信号を受信するように最適化される。提案されたアンテナは、単一のPCBボードから作成される。アンテナは、1.15〜1.65GHzにわたってアジマス面において極めて均一の位相及び振幅パターンを有し、それゆえ、GPS、GLONASS、GALILEO及びOmniSTAR(商標)の周波数において一貫した性能を提供する。アンテナはまた、1175MHz〜1610MHzの種々の周波数において共通の位相中心を有し、ほぼ同じ放射パターン及び軸比特性を有する。  (もっと読む)
(もっと読む)
パルス波形測定を行うための装置及び方法
受信機は、規定された時間期間にわたって受信信号の平均チップ形状のイメージを形成する前置相関フィルタを備える。フィルタは、広帯域スペクトラムチップに沿った位置の特定の範囲またはコードチップ位相角から信号サンプルに関連する測定値を累積する複素累積レジスタのアレイを備える。累積された測定値を使用して、受信機は、直接路信号成分中のチップ遷移の位置を推定する。その後、受信機は、範囲の開始点、サイズ及び数を変更し、これにより、累積レジスタが、チップエッジからより多くの詳細を累積するようにすることができる。さらに、受信機は、累積された測定値を基準パルス波形と比較して、受信信号から計算された測距情報を歪ませることになるなんらかの干渉が受信した送信物中に存在するかどうかを判定することができる。  (もっと読む)
(もっと読む)
一体型GPS慣性システム
GPS受信機の新たな設置にも改良にも適したGPS慣性システムは、GPSアンテナのハウジングに組み込まれた慣性センサを含む。慣性センサの出力は、GPSシステムで使用されるのと同じデータ変調方式を使用して変調され、GPS搬送波と同じ周波数のRF周波数搬送波に載せられる。慣性測定値はアンテナからのRF信号と同じケーブルを用いて受信機に送られ、受信機は、GPS位置信号からデータを復元するのに使用されるのと同じ方式を使用して、センサ信号からデータを復元する。従って、既存のGPS受信機のソフトウェアを変更することで、慣性センサの出力から位置推定や速度推定が可能になる。 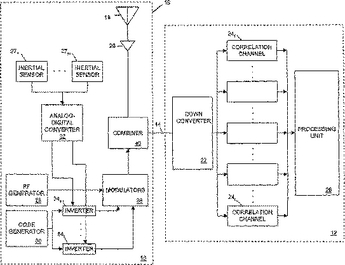 (もっと読む)
(もっと読む)
カバレッジに制限のある環境でGPSを使用して位置を求める方法

空がよく見えるベースGPSレシーバと、空の眺めに制限がある1以上のGPSレシーバと、前記GPSレシーバから供給された範囲情報をバッチ処理し、リモートGPSレシーバの位置を小さな許容誤差範囲内で判定する処理センターとから構成されるシステム。ベースGPSレシーバ、及びリモートGPSレシーバは、レシーバが所与の時刻において追跡している衛星信号に基づいて範囲情報を生成し、それらの範囲情報を処理センターに送る。範囲情報は、コードと、各GPSレシーバが追跡している信号についての搬送波測定値との両方を含む。処理センターは、例えば数時間、数日、又は数週間といった長期間にわたって範囲情報を収集した後、収集した情報をデータを処理する複数のパスにおいてバッチ処理し、レシーバの正確な緯度、経度、及び高度を計算する。処理センターは、浮動不明瞭度フィルタを使用してデータをバッチ処理し、データを処理する第1のパスの後、以前のパスにおいて計算された位置を使用して初期化される。また、処理センターは、後の位置計算に使用される情報が十分に信頼できるものであるか否かを確認するために、浮動不明瞭度フィルタの位置、及び位置共分散を固定し、ベースGPSレシーバ測定値に対して二重差を使用して、収集した範囲情報の品質の計算も行う。 (もっと読む)
慣性システム用の入力された位置合わせデータを使用する慣性GPSナビゲーションシステム
慣性(「INS」)/GPS受信機は、それが、始動中に動いているときには、入力された位置合わせデータを使用してINSサブシステムの位置合わせを決定する。位置合わせデータは、パラメータ化された表面情報、測定されたGPS速度、及び、受信機が搭載されている乗物と、慣性測定ユニット(「IMU」)の加速度計及びジャイロスコープに関連する慣性測定基準、または、ボディ、フレームとの間の既知のまたは既定の角度関係から決定される。制約をもたらすパラメータ化された表面情報は、受信機を収容している乗物が移動している表面の配向とすることができる。受信機は、初期のGPS位置を使用して、パラメータ化された表面上、したがって、既知の表面の配向上の乗物の位置を決定する。受信機は、次に、関連するGPS速度ベクトルを使用して、表面上の乗物のロール、ピッチ、及び方位を決定する。その後、受信機は、乗物の計算されたロール、ピッチ、方位、及び、乗物とIMUボディフレームとの間の既知のまたは既定の角度関係を使用して、IMUボディフレームを受信機によって使用される計算上のフレームまたは基準フレームに関連付ける回転行列を決定する。 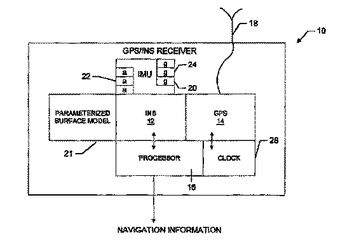 (もっと読む)
(もっと読む)
GPS受信機を備えた地震測定システム
3次元地震データを解析するためのシステムは、複数のデジタイザ装置(7)(各々が一式の地中聴音器(8)を備えている)、データ記録及びコントロールセンター(12)、上空視野が実質的に制限されていない関連するアンテナ(5)を有する基地GPS受信機、及び基地GPS受信機により提供される追跡支援情報を使用して、GPS衛星(9)信号を取得して追跡する、それぞれのデジタイザ装置(7)に設けられた低電力のスレーブGPS受信機(6)を備える。スレーブGPS受信機(6)は、追跡支援情報を使用して樹葉(11)による天蓋状の覆いの存在などのサイトにおける条件のために受信機で比較的弱くなっている場合があるGPS衛星信号を取得して追跡する。システムは、長時間にわたってスレーブGPS受信機(6)によって提供された距離情報を処理する。このようにして、スレーブGPS受信機(6)が、3または4つだけの比較的短い時間間隔にわたって、その長時間の間様々な上空の位置にある2つ以上の衛星(9)の組からのデータを観測して収集することしかできない場合でも、それぞれのスレーブGPS受信機(6)、したがって、デジタイザ装置の正確な位置を計算することができる。スレーブGPS受信機(6)は、次に、デジタイザ装置(7)のために、GPSコードに基づいており、かつ、システム全体で同期化しているタイミング信号を局所的に生成する。所与のスレーブGPS受信機(6)が、所与の時刻において、いずれのGPS衛星信号も追跡できない場合には、近くのスレーブGPS受信機(6)が、地中聴音器のデータ収集動作のために必要なタイミング情報を供給する。  (もっと読む)
(もっと読む)
1 - 7 / 7
[ Back to top ]