
株式会社ソーキにより出願された特許
21 - 28 / 28
3次元レーザスキャナを用いたトンネル掘削施工支援システム
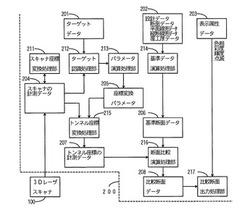
【課題】トンネル掘削工事の作業が煩雑になることなく簡便に断面の計測、掘削断面、覆工断面の評価、管理を行うことができ、工期の短縮、施工精度の向上を図る。
【解決手段】トンネル壁面の複数箇所に設置されるターゲットのトンネル座標のデータ記憶手段と、トンネル断面の基準データ記憶手段と、比較断面の表示属性のデータ記憶手段と、3次元の計測データのターゲットの位置を認識してターゲットのスキャナ座標とデータ記憶手段に格納されたトンネル座標を求める認識処理手段と、ターゲットのスキャナ座標およびトンネル座標に基づき座標変換パラメータを求めスキャナ座標の計測データをトンネル座標の計測データに変換する座標変換処理手段と、トンネル座標の計測データと基準データとを比較演算して比較断面データを求める比較演算処理手段と、出力処理手段とを備え、表示属性のデータ203と比較断面データ208に基づき比較断面の情報を出力する。
(もっと読む)
画像送信機能付き測量装置、撮像ユニット、測量方法

【課題】測量装置を設置した地点にオペレータを配置しなくても、測量装置の視準方向の画像を確認しながら、視準方向を操作可能とする。
【解決手段】画像送信機能付き測量装置では、光軸方向の拡大画像を得る望遠鏡、望遠鏡で視準した視準点までの距離もしくは所定方向を基準とした角度の少なくとも一方の測量情報を出力する測量手段、及び望遠鏡で視準する視準方向を変更する駆動手段、を備えた測量装置の望遠鏡の接眼部に、着脱機構を介して撮像手段を着脱可能に取り付け、撮像手段にて得られた画像情報、測量手段にて得られた測量情報を遠隔地へ送信する送信手段と、遠隔地から送信された制御信号を受信する受信手段と、受信した制御信号に基づいて、望遠鏡の光軸方向を変更するように駆動手段を制御する制御手段と、を付加した。
(もっと読む)
支保工の建て込み方法
【課題】 精度よく支保工の建て込みを行うことができる支保工の建て込み方法を提供する。
【解決手段】 支保工1を支保工建て込み位置に立て込むにあたり、エレクタ装置によって支保工建て込み位置の近傍まで支保工1の右材1Aおよび左材1Bを搬入する。続いて、右材1Aおよび左材1Bの位置をトータルステーション2によって計測し、それらの位置座標を計測する。また、右材1Aおよび左材1BについてのY軸周りおよびX軸周りの2方向の傾斜を2軸傾斜計4によって計測する。ここでの計測値によって右材1Aおよび左材1Bの位置座標を補正する。
(もっと読む)
計測方法
【課題】見通しが利かず作業者が立ち入ることの困難な小口径管路であっても、その管路を計測すること。
【解決手段】本発明の計測方法では、計測区間の基点には前方を撮像する撮像手段を設置し、中間点には前方と後方とを前後方向に同軸の光軸で撮像し得る中間撮像手段を設置し、終点には後方を撮像する撮像手段を設置し、基点の撮像手段で撮像した画像と、各中間点の撮像手段で撮像した画像と、基点〜中間点〜終点間の距離と、に基づいて、基点に対する終点の位置を計測するようにした。
(もっと読む)
管路計測方法
【課題】作業者が立ち入ることの困難な小径管路や、悪環境の管路であっても、撮像装置と基準ターゲットを設置可能であれば、その間の管路の直線性を計測する技術を提供すること。
【解決手段】本発明にかかる管路計測方法では、計測対象区間の管路の終点に基準ダーゲットを配置し、計測対象区間の管路の基点に前記基準ダーゲットを撮像し得る撮像手段を配置して、計測対象区間の管路の直線性を計測する経路計測方法において、
前記撮像手段で前記基準ダーゲットを撮像することによって、基点から終点までの基準軸を決定する基準軸決定工程と、前記撮像手段で前記管路の途中に配置した中間ダーゲットを撮像することによって、前記基準軸に対する前記中間ダーゲットの変位を計測する変位計測工程と、を含み、計測対象区間の管路の直線性を計測するようにした。
(もっと読む)
撮像システム、および立体画像撮像方法
【課題】モータ駆動機能を備えたトータルステーションに付加できる立体画像撮影機能を提供すること。
【解決手段】本発明にかかる撮像システムにおいては、角度情報を出力する角度測定機能と、電子制御による駆動手段とを備えた測定手段に、画像情報を出力する少なくとも2つの撮像手段を、所定の相対的な位置関係で配設し、前記測定手段と前記撮像手段とを関連付けて作動させることにより、前記測定手段から得られる角度情報と、前記撮像手段から得られる画像情報とに基づいて、広範囲の立体画像を得るように構成した。
(もっと読む)
推進機位置計測システム
【課題】 推進管がローリングしても複数のターゲットの画像を処理して推進管の位置を正確に求めること。
【解決手段】 計測装置16−(i−1)がローリングした場合、計測装置16−(i−1)よりも推進方向Xで1つ後方の計測装置16−iにおいて、計測装置16−(i−1)に配置された2つの前方用円形ターゲット34a、36aの中点の座標(X3,Y3)と計測装置16−(i−1)のローリング角φを算出し、これらの算出結果を基に、計測装置16−(i−1)においてローリングに伴う画像104、106をローリング前の画像100、102に変換し、計測装置16−(i−1)における挟角θiを正確に求めるようにしているので、計測装置16−(i−1)がローリングしても、推進管の位置を正確に求めることができる。
(もっと読む)
推進機位置計測システム
【課題】 推進管がローリングしてもターゲットの画像が変位するのを防止すること。
【解決手段】 推進機10に連結される推進管12に設置されて測点Si間の挟角θiに関する情報を演算装置18に転送する計測装置16は、前方用撮像素子58と後方用撮像素子60を収納する内部筐体20と、前方用ターゲット36と後方用ターゲット38が固定されたカバー24と、カバー24に連結された外部筐体22を備え、内部筐体20はベアリング48、50を介して外部筐体22に回転自在に支持され、内部筐体20の底部には内部筐体20の重心を鉛直線上にバランスさせるためのバランスウエイト62が固定されており、推進管12のローリングに伴って外部筐体22がローリングしても、内部筐体20の重心はバランスウエイト62によって常に鉛直線上に維持される。
(もっと読む)
21 - 28 / 28
[ Back to top ]