
Fターム[2B033BB03]の内容
土作業機(ロータリ) (5,852) | 耕耘爪の構成 (230) | 耕耘爪の形状 (88) | 正逆転用爪 (10)
Fターム[2B033BB03]の下位に属するFターム
左右非対象爪 (2)
Fターム[2B033BB03]に分類される特許
1 - 8 / 8
耕耘爪
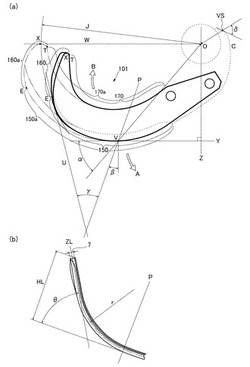
【課題】耕耘爪軸の逆回転による弾性体カバーの土除去作業を長期的に行うことが可能となる耕耘爪を提供する。
【解決手段】耕耘爪101は、縦刃部から横刃部にかけた回転方向と逆向きの湾曲の度合いを高くすることで、耕耘爪101の爪先である頂部Xと耕耘爪軸Oとの距離が近くなるように設計してある。この結果、耕耘爪101の爪先である頂部Xと耕耘爪軸Oとの距離が近くなっており、度重なる耕耘作業を行った場合でも、爪先における摩耗の影響が低減されるようになることから、頭縁部160における曲線形状の部分を多く残す(維持する)ことが可能となる。このため、度重なる耕耘作業に伴い、耕耘爪101の摩耗が進行した状況であっても、耕耘爪軸の逆回転による弾性体カバーの土除去作業を長期的に行うことが可能となる。
(もっと読む)
耕耘爪

【課題】耕耘爪軸の逆回転による弾性体カバーの土除去作業を長期的に行うことが可能となる耕耘爪を提供する。
【解決手段】耕耘爪101は、縦刃部から横刃部にかけた回転方向と逆向きの湾曲の度合いを高くすることで、耕耘爪101の爪先である頂部Xと耕耘爪軸Oとの距離が近くなるように設計しており、度重なる耕耘作業を行った場合でも、爪先における摩耗の影響が低減されるようになることから、頭縁部160における曲線形状の部分を多く残す(維持する)ことが可能となる。このため、度重なる耕耘作業に伴い、耕耘爪101の摩耗が進行した状況であっても、耕耘爪軸の逆回転による弾性体カバーの土除去作業を長期的に行うことが可能となる。
(もっと読む)
耕耘機
【課題】
本願発明は、通常の平面耕耘作業と畦立て作業を円滑に行う耕耘機にすることを課題とする。
【解決手段】
ロータリ耕耘装置(8)を正逆転可能に構成し、ロータリ耕耘装置(8)の中央部上方を覆う耕耘フレーム(41)を設け、耕耘フレーム(41)の左右両側部の左右耕耘カバー(42)をヒンジ(42a)により左右耕耘カバーの左右両側を上方に回動した開放状態と、ロータリ耕耘装置(8)の左右両側部を覆う閉鎖状態とに姿勢変更可能とする構成とし、後進走行位置と前進走行位置と耕耘位置と畦立位置を形成するガイド溝を設け、該ガイド溝を単一の変速レバー(67)でいずれかの位置にシフト可能に構成したとする。
(もっと読む)
ロータリ耕耘装置
【課題】耕耘作業と畝立作業との切換えを行う際に耕耘爪を取り外す必要がなく、尚且つ、平らな耕耘土面を形成することのできるロータリ耕耘装置を提供すること。
【解決手段】複数の耕耘爪を備えるロータリ軸9の回転方向を正回転方向及び逆回転方向に切換可能に構成しており、ロータリ軸9の外側に配置される外耕耘爪47が、正回転及び逆回転時に耕起土を外側に排出するように構成され、ロータリ軸9の内側に配置される内耕耘爪50が、正回転時にロータリ軸9の内側に向けて耕起土を排出して、逆回転時にロータリ軸9の外側に向けて耕起土を排出するように構成する。
(もっと読む)
歩行型管理機
【課題】耕耘作業時に泥土の持ち回りが多くなる逆転爪に対応するロータリカバーの後側内面に泥土が詰まって付着し、エンジンの馬力ロスを生じると共に付着した泥土の除去作業に手間が掛かるといった問題点を解消する。
【解決手段】逆転爪6bの上方を覆うロータリカバー18の後側部位Eを、側面視で後方に行くほど逆転爪6bの回転軌跡最外周Tに対する間隔Sが広くなるように構成することによって、耕耘作業時に泥土の持ち回りが多くなる逆転爪6bの取り付け位置に対応するロータリカバー18の後側内面への泥土の詰まりと付着防止を図り、且つ当該泥土の後方への適度な排出を可能にした。
(もっと読む)
ロータリ耕耘方法
【課題】ロータリ耕耘装置において、構成を簡単化しながら、正転耕耘で平面状に耕耘し、逆転耕耘で大きな畦を形成する。
【解決手段】ロータリ耕耘装置(17)の伝動ケース(40)の下部左右両側にロータリ軸(41)を突出し該軸(41)を正回転又は逆回転に切り換える切換操作部を備え、上記ロータリ軸(41)又は該ロータリ軸(41)と一体的に連結する連結軸(51,51)に正逆用耕耘爪(54)を取付け、ロータリ軸(41)の正転、逆転の切り換えによって普通耕耘か畝立作業かを選択するロータリ耕耘方法とする。
(もっと読む)
ロータリ耕耘装置
【課題】ロータリ耕耘装置において、構成を簡単化しながら、正転耕耘で平面状に耕耘し、逆転耕耘で大きな畦を形成する。
【解決手段】耕耘伝動ケース4の下部には、正転あるいは逆転切り替え可能な左右耕耘軸32,32を設け、左右耕耘軸32,32には耕耘爪34,…をその先端屈曲部が左右外側に向くように取り付ける。耕耘爪34,…の正転耕耘時において、回転上手側縁部の土中打ち込み位置に対して回転下手側縁部の土中打ち込み位置が左右内側に位置するように傾斜角度を持たせて左右耕耘軸32,32に耕耘爪34,…を取り付け、左右内側部の耕耘爪34,…の傾斜角度を左右外側部の耕耘爪34,…の前記傾斜角度よりも大きく構成する。
(もっと読む)
歩行型耕耘機
【課題】耕耘作業と、畝立作業とを、同じロータリ耕耘装置の正逆耕耘爪を取り換えることなく、両方の作業ができるようにしようとするものである。
【解決手段】歩行型耕耘機において、ロータリ耕耘装置(17)の伝動ケース(40)の下部左右両側にロータリ軸(41)を突出し該軸(41)を正回転又は逆回転に切り換える切換操作部を備え、上記ロータリ軸(41)又は該ロータリ軸(41)と一体的に連動連結する連結軸(51,51)には、取付基部から先端側に向けてこの先端側が中央の上記伝動ケース(4)側から離れる方向に湾曲し、横断面形状はロータリ軸(41)が上記正回転するときに打込み側がロータリ軸(41)軸心と略直交する平面に沿い、後続側が徐々に伝動ケース(40)に接近すべく形成された正逆用耕耘爪(54)を取付ける。
(もっと読む)
1 - 8 / 8
[ Back to top ]