
Fターム[2B081FA04]の内容
収穫機の構成要素−分草、穀稈送り込み (3,706) | リール装置 (136) | 配置、取付 (60) | 位置変更調節 (29) | 自動調節 (12)
Fターム[2B081FA04]に分類される特許
1 - 12 / 12
汎用コンバイン
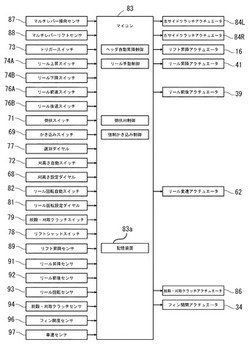
【課題】リールが上下移動駆動可能に支持された刈取部を、走行機体に昇降駆動可能に連結し、リール昇降アクチュエータによりリールを自動的に下降させるオートリフト制御の実行時、リールが穀稈に作用する前に刈取部が上昇してしまうことにより生じる稈こぼれを防止し、穀稈を適切に掻込みながら刈取部を自動的に上昇駆動させる汎用コンバインを提供する。
【解決手段】オートリフト制御でリールの刈取部に対する相対高さを検出する高さ検出手段91を設け、制御部83はオートリフト操作手段73によるオートリフト制御の実行時、高さ検出手段91により検出されたリール高さが予め定めた所定高さ以下でない場合にはリールを刈取部に対して下降駆動させるとともに刈取部を低速で上昇駆動させる一方で、高さ検出手段91による検出されたリール高さが上記所定高さ以下の場合にはリールを刈取部に対して下降駆動させるとともに刈取部を高速で上昇駆動させる。
(もっと読む)
汎用コンバイン

【課題】リール回転自動制御を制御部に設けた汎用コンバインにおいて、低速走行時でも、稈こぼれが発生することなく、迅速且つ効率的な刈取作業を行うことが可能な汎用コンバインを提供する。
【解決手段】作物を掻込むように回転駆動されるリールの回転速度を変速するリール変速装置と、変速操作するリール変速手動操作手段81と、車速検出手段97とを備え、車速に連動してリールの回転速度を制御する汎用コンバインであって、車速に関係無くリールを所定速度で回転させる強制掻込制御を制御部83に設け、強制掻込制御を実行する強制掻込操作手段69を備え、制御部83は、強制掻込操作手段69によって強制掻込制御が行われている最中は、リール回転自動制御を解除して強制掻込制御を実行する一方で、強制掻込操作手段69による強制掻込制御が解除された際には、強制掻込制御を解除してリール回転自動制御に復帰する。
(もっと読む)
汎用コンバイン
【課題】リール回転自動制御を制御部に設けた汎用コンバインにおいて、作物が倒伏している場合でも、迅速的且つ効率的な刈取作業を行うことが可能な汎用コンバインを提供する。
【解決手段】作物を掻込むように回転駆動されるリールの回転速度を変速するリール変速装置と、リールの回転速度を変速操作するリール変速手動操作手段81と、リールを昇降させるリール昇降アクチュエータ41と、リールを昇降操作するリール昇降手動操作手段74A,74Bと、車速を検出する車速検出手段97とを備え、車速に連動してリールの回転速度を制御するリール回転自動制御を制御部83に設けた汎用コンバインであって、倒伏刈制御を制御部83に設け、倒伏刈制御を実行する倒伏刈操作手段71を備え、制御部83は、倒伏刈操作手段71によって倒伏刈制御が行われた場合には、リール昇降アクチュエータ41により自動的にリールを最下げ位置に移動制御する。
(もっと読む)
コンバイン
【課題】車速に同調して駆動する刈取部を備えながらも、機体を停止又は後退させた場合には、作業者の任意のタイミングで車速とは無関係に刈取部を駆動させることのできるコンバインを提供する。
【解決手段】
走行部を有して自走可能となした機体本体の前方に刈取部を連結し、機体本体の走行部に刈取部を連動連結して、刈取部の刈取速度と走行部の走行速度を同調させたコンバインにおいて、走行部を走行停止又は後退させた場合にも、刈取部を強制的に駆動させる刈取部強制駆動手段を設けているので、走行部を走行停止又は後退させた場合に車速とは関係無く掻き込みリールを回転させることができ、走行車体を後退させるときでも掻き込みリールにより穀稈を取り込むことができる。これにより、特に畦際での作業性を向上させることができる。
(もっと読む)
コンバイン
【課題】刈取昇降レバーの操作と独立して掻込リールの下降操作をすることができ、刈取部と掻き込リールでの挟み込みをすることができるコンバインを提供すること。
【解決手段】
機体本体を変速操作する変速操作手段と、刈取部を昇降操作する刈取部昇降操作手段と、掻込リールを昇降操作するリール昇降操作手段と、をそれぞれ単独で操作部に配設しているので、刈取昇降レバーの操作と独立して掻込リールの下降操作をすることができ、刈取部と掻き込リールでの挟み込みをすることができる。そして、刈取部と掻き込リールでの挟み込みをすることで刈り終い時の穀稈が刈取部から脱落するのを防ぐ効果を有する。
(もっと読む)
コンバイン
【課題】オーガレストを非作業位置にした状態で、前処理部及びリールの両方を上昇駆動させると、排出オーガと干渉する。
【解決手段】オーガレスト9が、非作業位置にあることを検出し、かつリール11が上昇位置にあることを検出した場合、前処理部4の上昇を禁止する制御部38を備える。又は、オーガレスト9が、非作業位置にあることを検出し、かつ前処理部4が上昇位置にあることを検出した場合、リール11の上昇を禁止する制御部38を備える。
(もっと読む)
汎用コンバイン
【課題】刈取部に設けたリールが所定以上の高さに上昇駆動された場合であっても、該リールと、オーガとの衝突を防止できるとともに、オーガの自動収納位置の切換え忘れを防ぐことにより、オーガの自動収納の誤操作によるリールとオーガの衝突も効率的に防止できる汎用コンバインを提供することを課題としている。
【解決手段】オーガ9が平面視リール17とラップした第1収納位置Bと、オーガ9が平面視リール17とラップしない第2収納位置Aとを前記制御部75に設定し、オーガレスト32を、第1収納位置Bのオーガ9を受止める第1受止め位置と、第2収納位置Aのオーガ9を受止める第2受止め位置とに切換可能に、走行機体2側に支持し、前記制御部75は、オーガレスト32が第1受止め位置の場合には、オーガ9が第1収納位置に収納され、オーガレスト32が第2受止め位置の場合には、オーガ9が第2収納位置に収納されるように自動制御を実行する。
(もっと読む)
収穫機
【課題】作物の上端部の高さに適切に対応して取入部の高さを調整可能な収穫機を提供する。
【解決手段】コンバイン(収穫機)は、本体と、取入部と、収穫部昇降シリンダ18と、を備える。取入部は、立毛状態の作物から必要部分を分離して取り入れる。収穫部昇降シリンダ18は、取入部を本体に対して昇降させる。本体は、作物の上端部を検出する超音波センサ17を備える。そして、収穫部昇降シリンダ18は、超音波センサ17の検出結果に基づいて、取入部を昇降させる。
(もっと読む)
コンバイン
【課題】安価で、しかも刈取部の高さの制御が容易な掻込リールを装着したコンバインを提供することである。
【解決手段】機体の前側に配置した穀稈を刈り取る刈取部4の底部に設けた接地を検出する接地センサ40と刈取部4の対機体高さを検出する刈取高さセンサ66と刈取部4を機体に対して昇降自在に装着する昇降シリンダを備え、刈取部4の機体に対する高さを設定する刈取高さ設定ダイヤル52により設定された刈取部4の機体に対する高さに応じて接地センサ40と刈取高さセンサ66による検出値のいずれか一方に基づいて刈取部4の機体に対する高さの制御を行う制御装置60を設けたコンバインであり、刈取部4の機体に対する高さに応じて2つの高さセンサ40,66を使い分けることで制御操作が簡単となり、刈取部4の高さ制御のための部品点数が従来より少なくて済む。
(もっと読む)
コンバイン
【課題】刈取フレーム内にある刈り取った穀稈が畦際などで機体が旋回するときに該刈取フレームから外部にこぼれ落ちるのを防ぐことを自動で行える掻込み式のコンバインを提供すること。
【解決手段】リール昇降位置センサの検出値に基づき掻込リールの昇降位置を設定位置に昇降させる制御と、リール昇降位置センサにより掻込リールの昇降位置が設定範囲の上限位置より上昇したことが検出されると掻込リールを所定時間に亘って前進させ、その後、リール昇降位置センサの検出値に基づいて掻込リールの昇降位置を所定位置に下降させる制御を行う制御装置を設ける。
(もっと読む)
普通型コンバイン
【課題】刈取部の昇降と、リールの回転速度とを連動させ、刈取部の上昇に伴いリールの回転速度を一定時間だけ速めて、穀稈を確実にリール内に掻き込み、刈取作業の終了又は一時停止時における圃場の刈取作業面の端部に穀稈の刈残しを防ぐことができる、作業効率を向上させた普通型コンバインを提供する。
【解決手段】穀稈を持ち上げるリールタイン42を複数設けてなるリール26と、このリール26の下方に穀稈を切断する刈刃24および穀稈を移送するプラットフォームオーガ23を有する刈取部27と、を機体前部に昇降自在に備える普通型コンバインにおいて、リール26の回転速度は、車速に同調するとともに、刈取部27の上昇操作に連動して変速する。
(もっと読む)
コンバインの操作部構造
【課題】掻き込みリールの回転速度調節の操作と、機体の速度調整の操作とを容易に両立させることができ、熟練性を有することなく操作性と安全性とを向上させることができる操作部を提供すること。
【解決手段】操作部を具備する走行車体の前方に刈取部を昇降自在に取り付け、同刈取部に掻き込みリールを取り付けて、同掻き込みリールの回転動作により圃場の穀桿を掻き込み可能としたコンバインにおいて、操作部に配設した操向操作具に、掻き込みリールの回転数を増・減速調節操作するためのリール増・減速操作手段を設けた。
(もっと読む)
1 - 12 / 12
[ Back to top ]