
Fターム[2B304MB06]の内容
Fターム[2B304MB06]に分類される特許
1 - 10 / 10
農作業機
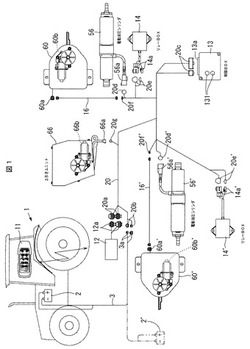
【課題】トラクタに装着して農作業を行う農作業機であって電装品が故障又は操作不能になった場合、必要な位置にアクチュエータを強制的に作動させることができる農作業機を提供することを目的とする。
【解決手段】トラクタ1に装着して、操作ユニット11からの操作信号を受信して、受信した操作信号に基づきバッテリ2を電源として、農作業機に配置される制御ボックス13内の制御部133の制御により農作業機の一部をアクチュエータ56、56’により作動させる農作業機において、制御ボックス13の表面に非常動作用スイッチ131を設け、非常動作用スイッチ131をONとすると、制御部133はアクチュエータ56、56’を作動させる
(もっと読む)
セミクローラ型作業車両

【課題】セミクローラ型作業車両において、左右クローラ走行装置を持ち上げ支持し、泥の落下を防止しながら路上走行をすることを課題とする。
【解決手段】作業車両の機体前側部には左右前輪を、機体後部には左右クローラ走行装置を設けたセミクローラ型作業車両において、機体後部に作業機昇降用のリフトアーム及び作業機連結用の三点リンク機構を設け、該三点リンク機構の左右ロワーリンクに、前後方向に長い左右持ち上げ棒を取り付け、左右ロワーリンクの前端部よりも前方へ突出する左右持ち上げ棒の前側部位に左右接地輪体を設け、左右リフトアームにより左右ロワーリンクを上方へ回動させると、左右持ち上げ棒の左右接地輪体により左右クローラ走行装置を地面から浮上させて支持することを特徴とするセミクローラ型作業車両とする。
(もっと読む)
散布作業車
【課題】薬液タンクを機体後部に備えた散布作業車において、機体後部に設けている作業機昇降用の昇降リンクを利用し、薬液タンクの据付け作業を一人の作業者でできるようにする。
【解決手段】左右昇降リンクの先端部に前記薬液タンクの底面前側部を取り付け可能に構成し、後側部を下方に前側部を上方にしている接地状態の前記薬液タンクの底面前側部を後側下方に下降回動している左右昇降リンクの先端部に連結し、左右昇降リンクを前側上方に回動し薬液タンクを持ち上げ、薬液タンクの底面後側部が走行車体の据付け面に到達すると、左右昇降リンクから薬液タンクを取り外し、次いで、左右昇降リンクの先端部で薬液タンクの底面を下側から支持しながら下降回動し据付け状態に移動するようにしたことを特徴とする散布作業車の構成とする。
(もっと読む)
作業車両搭載用制御装置
【課題】作業車両1に各制御手段210,213,281,282を組み付けた後に、個別の制御プログラムをそれぞれ対象となる制御手段210,213,281,282に書き込む場合において、適式な制御プログラムを各制御手段210,213,281,282に伝送できるようにする。
【解決手段】通信バス280に接続された外部端末290にて、識別子毎のプログラムを、識別子に対応した制御手段210,213,281,282にインストールするように構成されており、外部端末280と各制御プログラムとに保安用の固有コードを有する。インストール前に予め、外部端末280の固有コードと各制御プログラムの固有コードとを照合し、合致した制御プログラムを、これに対応する制御手段210,213,281,282にインストールするように構成する。
(もっと読む)
農作業機
【課題】トラクタに装着し農作業をする農作業機が作業しているか否かをより的確に判定
する判定システムを有する農作業機を提供することを目的とする。
【解決手段】農作業機が移動しているか否かを検知する移動検知手段1と、農作業機の姿勢が作業姿勢であるか否かを検知する作業姿勢検知手段2と、農作業機が作業している否かを判定する判定手段4とを有し、判定手段4は、移動検知手段1からの情報から農作業機が移動中であり、かつ、作業姿勢検知手段2からの情報から農作業機の作業姿勢が作業状態であると判断した場合、当該農作業機が作業中であると判定する。
(もっと読む)
乗用田植機
【課題】苗継ぎ時に、植付部を所定の高さまで上昇させるとともに、当該植付部を傾斜させることにより、苗継ぎ作業に必要な労力を低減することが可能な田植機を提供する。
【解決手段】走行部10と、走行部10の後部に具備され、植付作業を行う植付部30と、上部リンク52及び下部リンク53を備え、植付部30を走行部10に対して昇降可能に支持する昇降リンク機構50と、を具備する乗用田植機1において、上部リンク52を伸縮させることにより、走行部10に対する植付部30の相対角度θを変更する角度変更アクチュエータ52cと、昇降リンク機構50により、植付部30を所定の高さに調節するとともに当該高さで停止させ、角度変更アクチュエータ52cにより、植付部30の相対角度θを所定の相対角度θs−dβ1に調節する苗継ぎ制御を行う制御部100と、を備えた。
(もっと読む)
苗植機
【課題】本発明では、畦越えの走行速度を気にすることなく任意のスピードで畦越えをしても走行車体が不安定になることなく圃場の畦際まで適正な植付深さで苗を植付けられるようにすることが課題である。
【解決手段】走行車体の後側に苗植付部を装着した苗植機において、走行車体の前後傾斜検出手段と走行速度検出手段を設け、前後傾斜検出手段による走行車体の上向き傾斜の検出で畦越え植付昇降制御モードに移行し、この畦越え植付昇降制御モードでは走行速度検出手段が検出する走行速度の高低に応じて苗植付部の上昇速度を高低に変更制御するように苗植機の苗植昇降制御装置を構成した。
(もっと読む)
作業車両のアーム型作業機
【課題】農用作業車両の複数箇所にロボットアームを装着可能に構成し、ロボットアームにより複数の作業を円滑に実行する。
【解決手段】縦軸(22c)回り及び横軸(22d)回りに回動自在な第一アーム(23)と、この第一アーム(23)の先端部に屈折自在に連結している第二アーム(24)とでロボットアームを構成する。ベース部材(22)に前記第一アーム(23)を前記縦軸(22c)回りに回動自在に支持し、トラクタ(1)の機体前側部と左右側部にベース部材(22)の取付部(21a,21b)を設け、第二アーム(24)の先端部に複数の補助作業装置(26,…)を取り付け可能に構成する。
(もっと読む)
作業車輌
【課題】 各種の自動制御機能の入切設定を一括して操作可能にするものでありながら、安全に各種の自動制御を使用することが可能な作業車輌を提供する。
【解決手段】 作業車輌に、農作業中に入設定すべき制御グループAの自動制御機能110を入設定に切換えると共に、農作業状態に合わせて選択すべき制御グループBの自動制御機能120のそれぞれを個別操作手段にて個別に入設定又は切設定にし得る作業モード101と、制御グループA及び制御グループBの自動制御機能を全て切設定にする走行モード100とを設け、これらモードの切換えを選択操作し得るモード操作手段を設ける。作業モードを選択した際、制御グループAの自動制御機能110は入設定されると共に、制御グループBの自動制御機能120は、操作者の個別操作が反映されて入切設定されるため、意識せずに入設定されることの防止が図れる。
(もっと読む)
作業車両の姿勢制御装置
【課題】農作業機を用いた農作業が簡単な運転操作で実行できるものでありながら、作業車両の転倒を防止する制御を容易にできる作業車両の姿勢制御装置を提供する。
【解決手段】リンク機構を介して昇降可能に装着した農作業機に、車両の傾斜角を検出する傾斜センサ120,131と、走行速度を検出する車速センサ127とによる検出結果に基づき作業車両の姿勢制御装置において、総合転倒角を、前記農作業機を前記作業車両に連結した場合の前記作業車両の転倒角とするとき、前記総合転倒角よりも所定角度だけ小さい警報値以上になったときに、オペレータに警報するための警報手段134と、前記傾斜センサの検出値が前記総合転倒角より一定角度小さく且つ前記警報値より大きくなったときに、前記作業車両のエンジンの回転数を強制的に低下させるエンジン回転制御手段114とを備えた。
(もっと読む)
1 - 10 / 10
[ Back to top ]