
Fターム[2B304PA05]の内容
Fターム[2B304PA05]に分類される特許
1 - 10 / 10
作業車両
【課題】走行停止状態での待機時間を不要としつつ、後進走行中に従来より短時間に作業機を上昇できる作業車両を提供すること。
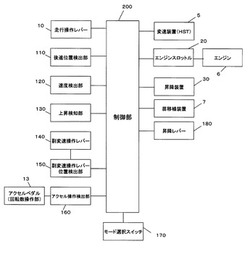
【解決手段】機体2の後部に苗移植装置7を装着するためのリンク機構8と、リンク機構を昇降させる昇降装置30と、機体2に設けられたエンジン6と、エンジン6の動力を変速して出力する変速装置5と、前進走行域、停止域、及び後進走行域の何れかの位置に切り替えることにより、変速装置の出力を変化させて走行速度を操作する走行操作レバー10と、走行操作レバー10が少なくとも後進走行域にある場合に苗移植装置7の上昇速度をエンジン回転数に基づいて制御する第1の制御を行う制御部200とを備え、第1の制御は、走行操作レバー10が、後進走行域の内、走行速度を最高に設定する最高速位置にあるときのエンジン回転数よりも、最高速位置より手前の位置にあるときのエンジン回転数の方を高くする制御である、作業車両。
(もっと読む)
トラクタの作業機昇降装置

【課題】操縦席から上げ側ストッパを移動調節するだけの簡単な設定動作により、リフトアームの上方回動高さの規制を能率よく正確に行うことができるトラクタの作業機昇降装置を提供する。
【解決手段】ポジションコントロールレバー15に片当たりすると共に、電動モータ19によって回動されるポジションコントロールアーム17と、リフトアーム12のフィードバックリンク12aによって切り換えられる昇降バルブを備えるトラクタの作業機昇降装置であって、ポジションコントロールレバー15を案内するレバーガイド21に、ポジションコントロールアーム17、又はポジションコントロールアーム17とポジションコントロールレバー15にそれぞれに接当して、作業機の最上げ位置を設定する上げ側ストッパ33を設けた。
(もっと読む)
水田作業機の自動昇降制御装置
【課題】 走行機体の後部に昇降自在に連結した水田作業装置にセンサフロートを上下揺動自在に装備し、センサフロートの揺動角度を目標角度に維持するように水田作業装置を昇降制御するよう構成した水田作業機の自動昇降制御装置において、走行機体の前後傾斜を応答性良く的確に検知して、的確な目標角度補正を行い、安定した作業深さをもたらす昇降制御を実行できるようにする。
【解決手段】 走行機体に機体前後方向の角度変化を検知する角速度センサ31を設け、この角速度センサ31の検出情報に基づいてセンサフロートの目標角度θ0を自動補正する制御手段を備えてある。
(もっと読む)
農用作業機
【課題】 植付装置の昇降操作と、整地装置の昇降操作と、整地装置に対する動力伝達の入切操作とを連動させて、動力伝達の入切を同じタイミングで繰り返して確実に実行可能とすることにより、整地装置の操作に伴う作業者の負担を軽減する。
【解決手段】 1個の操作レバー85を操作して整地装置51の昇降と整地装置51に対する動力伝達の入/切とが同時に制御される。操作レバー85によって動力伝達が入に設定されていても、植付装置31が上昇されると、連動機構120が整地装置51に対する動力伝達を強制的に切に設定する。
(もっと読む)
農作業機連結装置
【課題】農作業機の持ち上げ時の回動を容易に行わせようとする。
【解決手段】作業機側のヒッチ(48)に支点軸(50)を設けこの支点軸(50)回りに回動自在にアーム(49)を設け、このアーム(49)には農作業機(46)を保持するホルダ(51)を設けると共に上記ヒッチ(48)に対して作業姿勢と非作業姿勢に固定する手段(6)を設け、このアーム(49)に支点軸(50)軸心から離れた位置から略水平状に延出する中継ロッド(52)を設け、この中継ロッド(52)に踏み込みペダル(55)を連結してなる。
(もっと読む)
ロータリ耕耘装置のカバー装置
【課題】ロータリ耕耘装置においてリヤーカバーの左右両側から泥の漏れを防止する。
【解決手段】チエンケース13の下端部に耕耘軸17を回転自在に軸架し、この耕耘軸17に多数の耕耘爪18,…を取り付けて耕耘部Aを構成し、耕耘部Aの上方部及び左右両側部を耕耘カバー19により覆い、この耕耘カバー19の後側端部には左右方向のピン21aを介してリヤーカバー21を上下回動自在に軸支し、このリヤーカバー21の左右両側前部を左右の後側サイドカバー22,22で覆い、このリヤーカバー21の左右両側後部には上下移動可能な左右閉鎖板26,26を設け、耕耘部Aの耕耘深度が浅くなりリヤーカバー21の下方回動状態では左右閉鎖板26,26が下方に移動し、耕耘部Aの耕耘深度が深くなりリヤーカバー21の上方回動状態では左右閉鎖板26,26が上方に移動するように構成する。
(もっと読む)
歩行型作業機
【課題】 操向ハンドルを正位置ないしは逆位置のいずれにおいても、楽な姿勢で尾輪の昇降調節が行えるようにすること。
【解決手段】 自走可能な走行車体と、同走行車体に連結した作業装置と、同作業装置を上記走行車体と共に支持する尾輪とを装備し、走行車体に操向ハンドルの基端部を取り付けると共に、同操向ハンドルは、先端部に形成した把持部を作業装置の上方に配置した正位置と、基端部を中心とする上下方向の軸線廻りに把持部を正位置から略180度反転させた逆位置とに位置変更自在となした歩行型作業機において、尾輪に、同尾輪を昇降させて作業装置の作業高さを調整する作業高さ調整部を連動連設すると共に、同作業高さ調整部は、操向ハンドルに設けた遠隔調整操作部により手元操作可能となした。
(もっと読む)
農作業機の昇降操作装置
【課題】 走行機体に連結した作業装置を油圧シリンダで駆動昇降するよう構成するとともに、前記油圧シリンダの作動を司る制御バルブを、上昇位置、および、下降位置に亘って操作可能な昇降レバーによって切換え操作するよう構成した農作業機の昇降操作装置において、作業装置を大きく昇降させる場合には速やかに昇降させることができるとともに、少しだけの昇降を簡単かつ正確に行えるようにする。
【解決手段】 昇降レバーの操作径路における、「中立」位置と「上昇」位置との間を、「上昇」位置に操作されたときの基準上昇速度Vusと異なる速度で作業装置を上昇作動させる上昇用中間操作域に設定するとともに、「中立」位置と「下降」位置との間を、「下降」位置に操作されたときの基準下降速度Vdsと異なる速度で作業装置を下降作動させる下降用中間操作域に設定してある。
(もっと読む)
トラクタのレバー操作構造
【課題】 作業装置昇降用の油圧シリンダを作動制御するポジションコントロールバルブを、ポジションコントロールレバーで人為調節操作するよう構成したトラクタのレバー操作構造において、ポジションコントロールレバーに付与する摩擦保持力を小さく設定しても、上限まで上昇させた作業装置が不用意に下降することがないようにする。
【解決手段】 上限位置まで操作されたポジションコントロールレバー20が下降方向に移動するのを阻止する上昇ロック機構24を備える。この上昇ロック機構24としては、上限位置まで操作されたポジションコントロールレバー20の下降操作側に配備したレバー係止部材25を、レバー操作方向に沿った軸心周りに回動自在に構成して、レバー係止部材25をレバー操作径路に対して出退切換え可能にしたものが好適に機能する。
(もっと読む)
乗用型作業機
【課題】前輪に対する操向操作を行うだけで、旋回内側の後輪を制動させて旋回を操作性良く行える乗用型田植機があるが、操縦者は機体の旋回操向操作以外に、作業装置の駆動の入切操作や上下動操作をしなければならず、旋回時の操向操作に専念できず、未だ、旋回操作性において課題があった。
【解決手段】操向用の左右前輪6・6とエンジン12からの動力を変速する伝動装置からの出力で駆動される左右後輪7・7を備え、左右後輪7・7への駆動を各別に入り切りする左右サイドクラッチI・Iを設けた乗用型作業機おいて、左右前輪6・6を所定の速度以上の速さ又は所定以内の均一な操向速度で所定角度以上に操向操作すると、旋回内側となる後輪7のサイドクラッチIを切り、旋回内側となる後輪7の回転数の検出に基づいて走行距離を算出して、旋回時の諸作業用の作動を自動的に行わせる制御装置170を設けた乗用型作業機。
(もっと読む)
1 - 10 / 10
[ Back to top ]