
Fターム[2B304RA13]の内容
農作業機用昇降装置 (9,026) | 主要構成、被制御機器 (505) | 連結機構 (99) | ロアーリンク (14)
Fターム[2B304RA13]に分類される特許
1 - 14 / 14
作業車両のエンジン負荷制御装置
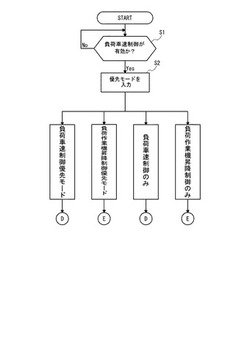
【課題】作業時に過負荷がかかった場合において、作業形態に応じて減速割合を変更可能とし、負荷制御のモードを切換可能な作業車両のエンジン負荷制御装置を提供する。
【解決手段】作業車両のエンジン負荷制御装置において、エンジン負荷制御装置50は、エンジン回転数を設定エンジン回転数Xsに保つように、エンジン21が過負荷となった時の負荷に応じて、車速を増減し、又は作業機30を昇降する構成とし、負荷車速制御と負荷作業機昇降制御との制御優先順位を設定する制御実行順序設定手段52を備える。
(もっと読む)
作業機の傾斜角度検出構造

【課題】機体の傾斜角度が激しく変動する場合にも、機体の傾斜角を応答性良く良好に検出できるようにする。
【解決手段】重力加速度に対する出力が機体の傾斜角度に応じて変化するように機体に装備した加速度センサ77と、加速度センサ77の出力を機体の傾斜角度に換算する換算手段40bを備えて、機体の傾斜角度を検出する傾斜角度検出手段76を構成する。
(もっと読む)
作業車両の作業機昇降装置
【課題】手動操作用の切換バルブにより作業機の昇降速度を選択することができる作業車両の作業機昇降装置を提供する。
【解決手段】走行機体3に設けたトップリンク12と、ロワーリンク13,13とからなる3点リンク機構に作業機を連結して、リフトアーム16,16の上下回動によって作業機を昇降させる作業車両であって、前記リフトアーム16,16を駆動する左右のリフトアームシリンダ17L,17Rを備えると共に、当該リフトアームシリンダ17L,17Rを作動させる油圧回路中に、両リフトアームシリンダ17L,17Rを伸縮作動させる両シリンダ作動位置Aと、片側のリフトアームシリンダ17Lのみを伸縮作動させる片側シリンダ作動位置Bに切り換える手動切換バルブ37を設けた構成にする。
(もっと読む)
トロイダル無段変速式トラクター
【課題】走行車速を制御して作業走行を行うための制御部を有するトロイダル無段変速式トラクターにおいて、対地作業機の作業開始による負荷変動の影響を抑えて安定した作業走行を可能とするトラクターを提供することにある。
【解決手段】トロイダル無段変速式トラクターは、トラクターTの車速調節用トロイダル機構5aのバリエータ比を制御して作業走行を行うための制御部Cを備え、上記制御部Cは、上記対地作業機Rの作業開始に関連して上記バリエータ比の変更制御をするように構成する。
(もっと読む)
姿勢制御装置
【課題】車輌本体の連結された一の耕耘機を他の耕耘機に取り替えた場合であっても、該他の耕耘機の位置制御を良好に行える姿勢制御装置を提供する。
【解決手段】位置制御を司る制御手段に種別の異なる耕耘機毎の制御条件を記憶させておき、耕耘リヤカバーが耕耘爪の回動軌跡に最も近づいた状態での該耕耘リヤカバーの最閉回動角度に基づいて当該耕耘機の種別を判別し、予め記憶されている前記制御条件のうち判別された当該耕耘機用の制御条件を用いて位置制御を行う。
(もっと読む)
姿勢制御装置
【課題】車輌本体に対して昇降可能且つ左右に傾動可能に連結された耕耘機に対して自動高さ制御、自動耕深制御及び自動傾き制御を行う姿勢制御装置であって、前記耕耘機を最上昇位置よりは下方で且つ地面よりは上方に位置させた非耕耘作業状態での車輌本体の走行時に、前記自動傾き制御によって前記耕耘機が意に反して大きく傾動されることを防止し得る構造簡単な姿勢制御装置を提供する。
【解決手段】自動高さ制御と自動耕深制御と自動傾き制御とを行うように構成された姿勢制御装置は、車輌本体50の車速vが所定の閾値車速vSより高速の場合には、自動傾き制御の制御精度を緩和させると共に、閾値車速vSを設定高さ位置hSに応じて変更するように構成されている。
(もっと読む)
農用作業車
【課題】トラクタ本体が揺動源となり制御が不安定になることを防止し、且つ角速度センサの応答性の良さを生かして精度よく圃場面の起伏を検知して制御しうる農用作業車を提供する。
【解決手段】農用作業車1の左右の傾斜角の変化速度を検出する角速度センサ19と、前記角速度センサ19の検出値に基づいて、農用作業車1と対地作業装置14との相対角度を制御する制御手段60とを具備し、該制御手段60は前記対地作業装置14の姿勢変化による角速度を減少させるべく相対角度制御を行う農用作業車において、前記制御手段は、角速度センサ19の検出値が一定時間内に閾値を超える頻度が一定以上である場合は、前記対地作業機14の相対角度制御に対する角速度センサ19の検出値の影響を低下させる手段Aを設けた。
(もっと読む)
均平作業方法
【課題】
高低差のある圃場等の区画を、牽引車両に牽引される均平機を用いて均一平面にする方法において従来はレーザ光を基準にして、均平板に土を抱えられる程度に高さを保持し、土を抱えなくなったら徐々に均平板を下げることを繰り返しながら均一にしていた。その結果最後まで均一高さにならず、均平作業後半で低い部分があった場合には、全体から広く薄く運土せねばならず非効率的であった。また、オペレータは常に後方を振り返り均平板の土の様子を見ながら作業せねばならず危険であった。
【解決手段】
本願は均平作業前に圃場高さを測定し、均平にしたときの均平基準面高さを算出し、基準高さと比較した高低マップを運転席に表示し、均平作業中もリアルタイムに測定し高低マップを書き換え、効率的に作業を行えるようにした均平方法である。
(もっと読む)
農作業機の耕耘制御装置
【課題】耕耘爪の耕耘深さを略一定に維持する耕耘深さ自動制御を、高精度に実行できる農作業機の耕耘制御装置の提供。
【解決手段】作業車両に、耕耘機をリンク機構を介して昇降可能に装着し、前記耕耘機を昇降動する昇降制御アクチュエータと、前記耕耘機のリヤカバーの回動角度を検出するリヤカバーセンサと、前記耕耘機の耕耘深さを設定する耕耘深さ設定器と、前記昇降制御アクチュエータを作動させる耕耘制御手段とを備えてなる農作業機の耕耘制御装置において、前記耕耘機の重量を検出する重量センサを備え、前記耕耘制御手段は、前記耕耘機の耕耘爪の耕耘深さ制御の作動速度を演算するための制御ゲインを、前記重量センサ値にて補正し、前記重量センサ値にて補正された制御ゲインと、前記リヤカバーセンサ値とに基づき、前記耕耘機の耕耘深さ制御速度と、前記耕耘爪の耕耘深さとを演算し、前記昇降制御アクチュエータを作動させるように制御する。
(もっと読む)
作業機の姿勢制御装置
【課題】前記耕耘機の耕耘作業を簡単な動作で実行するものでありながら、前記耕耘機の耕耘爪の耕耘深さを略一定に維持する耕耘深さ自動制御の設定値を、具体的な数値に基づいて、高精度に設定できる作業機の姿勢制御装置を提供するものである。
【解決手段】前車輪及び後車輪にて走行自在に支持された作業車両に、耕耘機をリンク機構を介して昇降可能に装着し、前記耕耘機を昇降動する昇降制御アクチュエータと、前記耕耘機を前記作業車両に対して左右に傾動させる傾斜制御アクチュエータと、前記昇降制御アクチュエータまたは前記傾斜制御アクチュエータを作動させる姿勢制御手段とを備えてなる作業機の姿勢制御装置において、前記耕耘機に、既耕耘地表面との距離を計測する既耕地用の距離計測センサと、未耕耘地表面との距離を計測する未耕地用の距離計測センサとを備え、前記姿勢制御手段は、前記距離計測センサの検出結果に基づき、前記昇降制御アクチュエータまたは前記傾斜制御アクチュエータを作動させるように制御するものである。
(もっと読む)
油圧システム
【課題】精度よく流量制御する油圧システムを提供する。
【解決手段】油タンク51と、油圧シリンダ52とを備え、油タンク51と油圧シリンダ52との間に油圧ポンプを設けた流入側パイプ53を備えるとともに、油圧シリンダ52と油タンク51との間にスローリターンバルブ(流量制御バルブ)Bを設けた流出側パイプ55を備え、スローリターンバルブBが開度位相の異なる複数のロータリー式バルブ60,70を組み合わせて油圧システム50を構成する。
(もっと読む)
作業車輌
【課題】 小型の作業車輌であっても、作業機装着部の近傍に配置されるポテンショメータ等の検出手段の破損を防止し得るようにした作業車輌を提供する。
【解決手段】 作業機昇降装置及び作業機装着装置を有する走行機体と、前記作業機装着装置21に着脱自在に装着され、対地センサに基づく前記作業機昇降装置により昇降される作業機50と、を備えてなる作業車輌において、前記作業機装着装置21に装着される前記作業機50側の装着部に、前記対地センサと機械的連結手段を介して連動するリンクアーム85を設け、前記作業機装着装置21に、前記作業機の前記走行車輌との相対移動を検出するポテンショメータ37と、前記リンクアーム85に係合し得るリンクアーム31と、該リンクアーム31と前記ポテンショメータ37とを連結するリンク機構45とを設けた。ポテンショメータ37を作業機装着装置21より前方に配置することにより、その破損を防止することができる。
(もっと読む)
作業車輌における傾斜自動制御装置
【課題】 角速度センサの基準値を刻々と補正する際の演算負荷や必要なメモリ容量が小さく済み、しかも、角速度センサ出力の読み込み頻度が少なくても補正の精度が必要十分に確保される作業車輌における傾斜自動制御装置を提供する。
【解決手段】 一定時間ごとに角速度センサの出力データから現在の基準データを差し引いて差分データを求め、新しい基準データ=現在の基準データ+修正量、修正量=差分データ/(2のn乗)という演算を実行して基準データを修正するので、角速度センサの角速度0に対応する基準値が変化すると、新しい基準値に対応するレベルへ向かって基準データが演算ごとに誘導される。差分データが小さい場合は乗数nを段階的に増加させて修正量を減らすが、差分データが大きい場合は乗数nを段階的に減少させて1回あたりの修正量を増やす。
(もっと読む)
コンバインの刈取装置
【課題】刈取ユニットの切断性能及び搬送性能を安定させ、刈取効率を向上させる。
【解決手段】左右一対の上搬送ケース42・42及び下搬送ケース43・43と、その下方に配設する回転刈刃44とを刈取ユニット40として、左右に複数並設してなるコンバインの刈取装置6において、刈取ユニット40をプラットホーム31に平行リンク84・85を介して連結するとともに、該刈取ユニット40の対地高さ検出手段79を回転刈刃44の後方に設け、該対地高さ検出手段79の検出値に基づいて刈取ユニット40を設定された対地高さへアクチュエータ88により昇降させるように構成した。
(もっと読む)
1 - 14 / 14
[ Back to top ]