
Fターム[2B327TC07]の内容
栽培用器(植木鉢)、播種用鉢 (15,293) | 栽培容器の移動、運搬 (577) | 移動方向 (264) | 非循環的な移動、移動方向不明なもの (148) | 水平方向、横方向への移動 (64)
Fターム[2B327TC07]の下位に属するFターム
成長に応じ植物の間隔を広げるもの (2)
Fターム[2B327TC07]に分類される特許
61 - 62 / 62
台車搬送機構
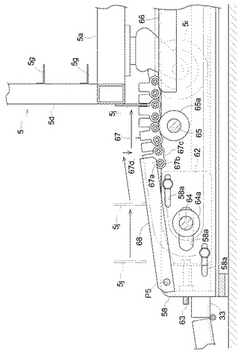
【課題】 育苗箱処理施設における台車搬送機構において、例えば作業者が台車を押して
いき無端回転体の搬送始端部に位置させる際、台車の係止部と無端回転体の係合部とが充
分に係合して、無端回転体により台車が確実に搬送され始めるように構成する。
【解決手段】 係合部67dを備えた無端回転体67を床部に備え、台車5を無端回転体
67の搬送始端部に位置させることにより、台車5の下部に備えられた係止部5jと無端
回転体67の係合部67dとが係合して、無端回転体67の回転により台車5が無端回転
体67に沿って搬送されるように構成する。台車5の係止部5jが無端回転体67の搬送
始端部の前端部から中間部に移動するまで、台車5の係止部5jが無端回転体67の係合
部67dよりも上方に位置するように、台車5を案内する案内部68を備える。
(もっと読む)
苗の移植補助ステーション

【課題】 障害物が密集した場所やインビトロ等の狭い作業空間において、培養した無菌の植物を分割し、発根用容器に移し替える移植工程の自動化を可能にする苗の移植補助ステーションの提供。
【解決手段】 一対の把持爪と、把持爪とアクチュエータとを連結する一部または全部が弾性特性を有する材料からなる把持力伝達系とを備え、アクチュエータの駆動により把持力伝達系および/または把持爪に撓みを生じさせながら脆弱物を把持するロボットハンドを、XYZ方向に移動可能なマニピュレータに連結した苗の移植補助ステーション。
(もっと読む)
61 - 62 / 62
[ Back to top ]