
Fターム[2C014DD02]の内容
武器;爆破 (1,267) | 目的 (209) | 信号検知又は処理手段 (38) | S/N比の向上 (14)
Fターム[2C014DD02]に分類される特許
1 - 14 / 14
誘導装置
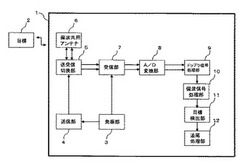
【課題】 従来の誘導装置は、目標に向けて垂直偏波と水平偏波の電波を送信して、目標から反射してきた信号を受信し、受信信号を偏波信号処理することでクラッタ信号の中から偏波特性の違う目標信号を検出して追尾する。しかし、海上の波が複数の周期性を含む場合には、クラッタの偏波特性があいまいとなって、偏波信号処理によるクラッタ抑圧効果が得られず、目標信号を検出できないという課題があった。
【解決手段】 水平偏波及び垂直偏波を同時受信する偏波共用アンテナと偏波検出処理を有し、誘導装置が偏波信号処理によってクラッタ信号の中から目標信号を検出する際に、予めドップラ信号処理によってクラッタの周波数成分を分解してクラッタの偏波特性のあいまいさを低減する。これにより、偏波信号処理時の目標検出性能を向上することを可能とした。
(もっと読む)
レーダー誘導装置

【課題】飛しょう体において、目標からの電波に対してRCSを大きくすることにより目標からの電波を一時的に受信しやすくする一方で、RCSを所望の値に変化させることにより、必要以上に目標に探知されることを抑制するレーダー誘導装置を提供する。
【解決手段】目標2からの電波に対するRCSを調整可能なRCS調整部15を備える。レーダー誘導装置1が目標2からの電波を必要とするときRCSを拡大させる。RCSを拡大し目標から電波を送信させることにより、追尾・誘導精度が向上することを可能にする。また、所望のRCSに変化させることにより必要以上に目標2に探知されないようにする。
(もっと読む)
レーザ誘導装置
【課題】レーザ発振部と受信部を備えた飛しょう体において、目標と背景を高精度で分離し、背景への誤追尾を防止し、目標に対して精密に誘導することのできる誘導装置を得る。
【解決手段】レーザ発振部103と受信部104を備えた飛しょう体1において、目標2を含む走査範囲にレーザ発振部103で発振したレーザ光を照射する。反射光を受信部104で検出し、反射光の受信強度と発振から受信までの遅延時間を用いて画像生成部105において走査範囲の強度画像と3次元画像を生成する。目標認識部106において3次元画像から走査範囲の各位置における高度値の標準偏差を計算し、平面領域と非平面領域とを判定し、非判定領域に対して強度画像と3次元画像を組み合わせた目標認識処理を行って目標と背景を分離することにより、目標の認識確率を向上させる。
(もっと読む)
誘導装置
【課題】
HPRF(High Pulse Repetition Frequency)の電波にて目標を探知・追尾する従来の誘導装置においては、メインローブクラッタと目標のドップラ周波数が重なる領域(ビーム領域)では、メインローブクラッタと目標の区別がつかず、メインローブクラッタを誤検出する可能性があるため、あらかじめメインローブクラッタの周波数領域を算出し、その領域内は探知しないようにしているため、クラッタのレベルが低く、実際は目標を探知できる場合があったとしても、探知できないという課題がある。
【解決手段】
従来は受信部と局部発振部が1セットであったが、複数の受信部と局部発振部のセットを有することで、目標からの反射信号とクラッタを弁別することができ、ビーム領域の目標を探知することを可能にするものである。
(もっと読む)
飛しょう体誘導装置
【課題】航空機などを目標とする飛翔体において、短い終末誘導時間でも、精度良く飛しょう体を目標に会合させるため、短時間での誘導を可能にする誘導制御技術を提供する。
【解決手段】目標の運動を探知して追尾するシーカ1と、前記シーカ1からの出力に基き前記目標の運動を推定するフィルタ装置2と、飛しょう体の運動を観測する慣性航法装置3と、前記目標の運動と前記飛しょう体の運動とから、前記目標と前記飛しょう体との相対運動を計算する相対運動計算装置4と、前記相対運動の結果に基き、誘導完了までの制御周期ごとの前記飛しょう体を加速する加速度指令値を計算する最適誘導計算装置5と、を備え、前記最適誘導計算装置5は、前記制御周期の度に、前記制御周期ごとの前記加速度指令値を繰返し計算する。
(もっと読む)
誘導装置及び目標判定装置
【課題】飛しょう体に搭載され、レーザ光を利用し目標の3次元画像と強度画像を生成してデータベースの格納データと比較することで、目標と背景を高精度で分離可能な誘導装置を提供する。
【解決手段】飛しょう体1に搭載する誘導装置10において、レーザ光を発振する装置とレーザ光を検出する装置を備え、目標2を含む範囲を誘導装置10から照射するレーザ光で走査することによって走査範囲から反射したレーザ光を受光及び検出し、検出した信号から走査範囲のレーザ光の反射強度分布及び3次元形状を算出して強度画像及び3次元画像を生成し、生成した強度画像と3次元画像を利用した信号処理により、目標を検出する。
(もっと読む)
目標追跡装置及び目標判定方法
【課題】所望の熱源目標を正確に追跡することができる目標判定装置を提供する。
【解決手段】制御装置14は、赤外線カメラ12により撮像された熱分布を表す画像を取得し、赤外線カメラ12の位置を表す位置情報をGPS受信機11から取得する。地図情報メモリ15には、追跡対象の熱源目標以外の熱源の位置を表した地図情報を記憶される。熱源領域抽出部141は、取得された画像から熱源領域を抽出し、目標判定部142は、上記取得された位置情報に対応する地図情報を用いて、抽出された熱源領域から熱源を予測することで追跡対象の熱源目標を判定する。
(もっと読む)
誘導装置
【課題】 ドップラレーダを使用して目標を観測する誘導装置は、目標信号のドップラ周波数とアンテナメインローブによるクラッタ周波数が重なる領域において、メインローブクラッタ信号を誤検出する可能性がある。このため目標信号がメインローブクラッタ周波数範囲外から出てくる待ち受け処理をするが、待ち受け処理中は目標もしくは誘導装置を搭載した飛しょう体自身が機動をし、ビーム領域外とならない限り目標信号を検出することができない。
【解決手段】 誘導装置のクラッタ実測値を使用してメインローブクラッタ電力と広がりを算出し、別途算出した目標信号電力とドップラ周波数を比較して目標の前方もしくは、後方のエネルギロスの少ない方へ誘導弾が回り込むよう、加速度指令値を計算する。
(もっと読む)
セミアクティブレーザ誘導システム
【課題】 システムの大型化等を招くことなく、飛しょう体の命中精度を改善し、かつ標的検出距離の延伸を図ったセミアクティブレーザ誘導システムを提供する。
【解決手段】 レーザ照射手段1からのレーザ光Lpを標的Xに照射し、当該標的Xで反射された反射光Lrを検出して標的Xの目標角を演算し、この目標角に基づいて飛しょう体を誘導制御するセミアクティブレーザ誘導システムにおいて、レーザ照射手段1は照射するレーザ光Lpを標的Xに対して走査するとともに、その走査角に対応してレーザ光Lpのパルス周期を変化する変調機能を備え、飛しょう体10は検出した反射光Lrを復調して得られるパルス周期から走査角を認識し、この走査角から補正角を求めて検出した反射光の入射角を補正して標的Xに対する目標角を得る機能を備える。
(もっと読む)
耐衝撃光学シーカとその製造方法
【課題】使用する光(例えばレーザビーム)を高いS/N比で検出することができ、かつ1万Gを超える高衝撃を受けても、割れ、ひびなどの損傷をほとんど受けない耐衝撃光学シーカとその製造方法を提供する。
【解決手段】発射時に高衝撃を受け、所定の狭帯域の光3を検出する耐衝撃光学シーカ10。狭帯域の光3を検出する光学センサ12と、その前面に配置された集光レンズ14及び光学フィルタ16と、その前面に配置されこれらを保護する光学ドーム18とを備える。集光レンズ、光学フィルタ及び光学ドームは、発射時の高衝撃に耐え、前記光3の透過率が高く、かつ転移温度が約200℃以上の耐衝撃耐熱プラスチックからなる。またこれらの一部又は全部が、その片面又は両面に薄膜多層膜20を有し、薄膜多層膜の全体で所定の狭帯域のバンドパスフィルタを構成する。
(もっと読む)
飛しょう体誘導装置
【課題】 従来の誘導装置は目標に向けて電波を送信して、目標から直接反射してきた信号を受信することにより目標信号を検出して追尾するが、目標からの反射波が海面または地表面等のクラッタを経由した信号を受信した場合は、目標方向と異なる方向に目標がいると認識し、目標ではなくクラッタを追尾し、誤ロックすることがあった。
【解決手段】 従来は目標方向のみに電波を送信していたが、本方式では、目標方向及びクラッタ方向に角度を切換えながら電波を送信することで、目標方向及びクラッタ方向の2種類の受信信号を得ることができ、この2種類の受信信号を比較することでクラッタ信号を除去し、クラッタに誤ロックすることなく目標を正確な角度で追尾することが可能となる。
(もっと読む)
誘導装置
【課題】 従来の誘導装置は目標に向けて電波を送信して、目標から直接反射してきた信号を受信することにより目標信号を検出して追尾するが、目標からの反射波が海面または地表面等のクラッタを経由したマルチパス信号を受信した場合は、目標方向と異なる方向に目標がいると認識し、目標ではなくクラッタまたはマルチパスを追尾し、誤ロックすることがあった。
【解決手段】 目標からの直接反射波はHH信号(水平偏波による送受信)とVV信号(垂直偏波による送受信)とで電力差がなく、マルチパス信号はHH信号とVV信号とで電力差が生じる。この電力差に基づき信号処理することにより、目標からの直接反射信号とマルチパス信号とを弁別し、弁別後の目標からの直接反射信号を用いて誘導処理を行う。
(もっと読む)
飛しょう体及び飛しょう体誘導方法
【課題】従来の飛しょう体は、誘導のためのコマンドや飛しょう体のステータス等の送受信を、地上の通信装置と飛しょう体間で直接データリンクを行っている。ただし、長射程の飛しょう体を誘導する場合、通信距離及び地球曲面の制約により地上の通信装置と飛しょう体間で直接データリンクを行うことが困難となる。
【解決手段】この発明に関わる飛しょう体は、誘導のためのコマンドや飛しょう体のステータス等を中継伝送するための中継装置を備えたものである。中継装置は、地上の通信装置からの電波の受信レベルが低下すると飛しょう体から自動的に分離され、パラシュートにより滞空し、飛しょう体と地上の通信装置間の中継伝送を行うことができる。
(もっと読む)
セミアクティブ方式の電波誘導装置
【課題】到来する移動物体に照射した電波の反射波を、ドップラ成分を用いて確実に分離、抽出し、安定した誘導制御を行うセミアクティブ方式の電波誘導装置を提供する。
【解決手段】リアアンテナ2で受けた目標照射波を利用したキャンセラ回路3〜6により、フロントアンテナのバックローブで受けた目標照射波の信号成分のキャンセル能力を向上しているため、飛しょう体が目標照射波のメインビーム内に有っても目標に関するドップラ成分を分離・抽出し、安定したセミアクティブ方式の電波誘導を行うことが可能となる。 また、上記キャンセラ回路を採用することにより、局部発振器が不要になり、小型軽量の飛しょう体に適した設計を行うことが可能となる。 また、モノパルスコンパレート機能をデジタル信号処理にて行うことにより、モノパルスコンパレータが不要になり小型軽量の飛しょう体に適した設計を行うことが可能となる。
(もっと読む)
1 - 14 / 14
[ Back to top ]