
Fターム[2C150ED21]の内容
Fターム[2C150ED21]の下位に属するFターム
車輪と手足 (1)
Fターム[2C150ED21]に分類される特許
1 - 18 / 18
玩具体におけるカバー部材の動作構造および玩具体
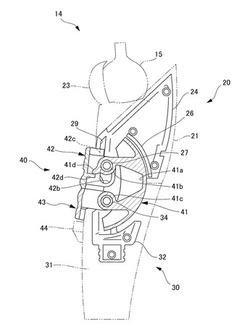
【課題】 より簡単な構成により、見栄えのよい玩具体におけるカバー部材の動作構造および玩具体を提供する。
【解決手段】 本発明に係る玩具体におけるカバー部材の動作構造は、第1の部材および第2の部材を互いに接近、離間可能となるように連結している連結部と、連結部に対向する位置に設けられるカバー部材と、を備えてなり、カバー部材は、第1の部材が第2の部材に対して接近したときには、第2の部材との接触により連結部に対して移動可能となっている。
(もっと読む)
玩具

【課題】玩具を提供すること。
【解決手段】無線リンクを介して、データを送信し、受信するための送受信機(24、28)と、プロセッサ(18、32)と、表現応答を記憶するためのメモリ(34)と、表現応答のための出力部(22、38)とを含み、表現応答に関するトリガーデータを受信し、トリガーデータが受信された場合に表現応答を選択し、前記出力部を介して前記表現応答を表現し、応答が出力されたことを示すトリガーデータを一斉送信するよう動作可能であることを特徴とする玩具が提供される。
(もっと読む)
鏡開き装置
【課題】視覚的に強く魅了させ得る鏡開きを実現させる鏡開き装置を提供する。
【解決手段】鏡開き装置30は、上面に開口部を有する略円筒形状の樽枠部材31と、樽枠部材31の開口部を覆うように設けられる鏡蓋1と、該鏡蓋1に回転力を与えて回転させる弾性部材21と、樽枠部材31の内部に設けられ、鏡蓋1の下方側から外力を加える押し上げ装置40と、樽枠部材31の内部に設けられ、開放された開口部から紙片を上方に放出する放出装置50とを備える。
(もっと読む)
制御情報生成装置および形状制御装置
【課題】音節の発音内容を規定した発音情報に基づいて、口を模した部分を持つ装置における口の形状を変化させる制御を行いながらも、口の形状の変化を自然なものにすること。
【解決手段】本発明の実施形態に係る形状制御システムにおいては、発音装置および口を模した部分を有する形状変化装置を、形状制御装置を用いて制御する。形状制御装置は、発音情報に基づいて発音装置を制御するとともに、発音情報から制御情報を生成して、この制御情報を用いて形状変化装置を制御する。形状制御装置は、発音情報から制御情報を生成するときに、口の形状が変わるときにおける変化前から変化後までの遷移時間を示す遷移情報を、予め決められたアルゴリズムに従って決定する。そして、形状制御装置は、口の形状が変化させるときには、遷移時間で徐々にその形状が変化するように形状変化装置を制御する。
(もっと読む)
無人一輪車。
【課題】 一輪車を無人で転倒させることなく走行させる。
【解決手段】 フレームに車輪を懸架して無人で走行する無人一輪車において、フレームに車輪を駆動する走行用モータを取り付けるとともに、フレームから左腕と右腕を張出させ、フレームにこれら左腕と右腕をそれぞれ水平軸回りの回動と鉛直軸回りの回動をさせる上下用モータと旋回用モータを取り付け、フレームの重心変移で発生する前後方向及び左右方向の転倒モーメントに基づくフレームの転倒を、走行用モータによる車輪の前後移動に基づく前後方向引戻しモーメントと、上下用モータによる左腕又は/及び右腕の水平軸回りの回動に基づく左右方向引戻しモーメントと、旋回用モータによる左腕又は/及び右腕の鉛直軸回りの回動に基づく左右方向引戻しモーメント及び回行時の遠心力に基づく旋回モーメントとを発生させて防ぐ。
(もっと読む)
コミュニケーションロボットシステム、コミュニケーションロボット制御方法およびプログラム
【課題】人に情報を伝達する動作を実行するときの強制度合いの条件に対応して異なる動作を実行する。
【解決手段】コミュニケーションロボットシステム1は、基本条件DB2、制御装置12、入力部7およびロボット部8を備える。基本条件DB2は、人に情報を伝達する動作を実行するときの、強制度合いの条件に対応して異なる動作をロボット部8に実行させる変化部分を有するプログラムを格納する。行動認識部5は、入力部7から入力したデータに基づいて、人の行動を表す情報を取得する。強制度合決定部4は、行動認識部5で取得した人の行動を表す情報に基づいて、プログラムを実行するときの強制度合いの条件を決定する。タスク決定部3は、ユーザの行動と、基本条件DB2のファイルを照合してプログラムを抽出し、強制度合いの条件に応じてプログラムの変化部分を選択する。ロボット部8は、変化部分が選択されたプログラムに従って動作する。
(もっと読む)
ビートトラッキング装置、ビートトラッキング方法、記録媒体、ビートトラッキング用プログラム、及びロボット
【課題】雑音に対するロバスト性を確保するとともに、テンポ変動への追従性及びテンポ推定の安定性を確保する。
【解決手段】音楽音響信号MAから自己音声信号SVの音声成分をエコーキャンセルした音響信号にフィルタ処理を行い、オンセットを強調したオンセットベクトルを出力するSobelフィルタ部21と、オンセットベクトルに正規化相互相関関数を用いた時間周波数パターンマッチングを行ってビート間隔信頼度を求める時間周波数パターンマッチング部22と、ビート間隔信頼度に基づいてビート間隔を推定してテンポTPを出力するビート間隔推定部23とを備えた。
(もっと読む)
動作生成装置、ロボット及び動作生成方法
【課題】発話内容に応じて身振り動作の処理速度を調整する動作生成装置を提供する。
【解決手段】動作生成装置20は、発話内容と発話内容に応じて動作パターンが動作する動作タイミングを保持する発話内容データベース2と、動作パターンに対応する動作データを登録する動作パターンデータベース8と、発話内容データベース2から発話内容を選択する発話内容生成部3と、選択された発話内容に応じて、説明に必要な動作パターンを判断する動作種別判断部7と、判断された動作パターンに基づいて、動作パターンデータベース8から動作データを抽出し、発話内容と動作データとを組み合わせる動作パターン組合わせ生成部9と、発話内容に応じた動作タイミングに基づいて、動作データの再生処理速度を調整する動作処理速度調整部10と、を備える。
(もっと読む)
脚式移動ロボット
【課題】姿勢安定制御や基本姿勢の維持などの観点から機体の各部位毎の質量分布を最適化する。
【解決手段】脚部における質量分布として、股関節ピッチ軸12と膝ピッチ軸14の間の部位の重心は、基本立ち姿勢と抱き上げ(直立状態)姿勢間で、股関節ピッチ軸と重力加速度ベクトルで構成される平面上に設定されている。これによって、直立状態において基本立ち上げ姿勢と抱き上げ状態を経る間における安定な姿勢遷移を実現することができる。
(もっと読む)
データ切り出し装置、データ切り出し方法及びデータ切り出しプログラム
【課題】ロボット装置を動かすためのモーションデータをコンテンツの特徴に合わせて容易に生成する。
【解決手段】楽曲データGDを解析してビート位置を検出するとともに、ビート位置により区切られる楽曲データGDの複数のビート区間Btそれぞれのビート区間特徴を得ると、このようにして得たビート区間Btそれぞれのビート区間特徴に応じて、モーションパーツデータをモーションデータMDから切り出し、この切り出したモーションパーツデータに対して、特徴解析情報TIDを付加するようにしたことにより、楽曲データGDの音楽区間毎の特徴に対応する特徴解析情報TIDを有するモーションパーツデータを選ばせることができ、かくして、ロボット装置11を動かすためのモーションデータMDを、楽曲データGDに基づく音楽の特徴に合わせて容易に生成することができる。
(もっと読む)
軌跡データ生成装置、軌跡データ生成方法及び軌跡データ生成プログラム
【課題】本発明は、音楽に合わせて動き対象を動かすための軌跡を得る。
【解決手段】本発明は、音楽ロボット装置11の楕円体状筐体20が動くときに再生する圧縮音楽データを設定し、ユーザによって描かれた楕円体状筐体20の動きの軌跡に対し、その設定した圧縮音楽データの再生時間情報を関連付けて軌跡データを生成することにより、楕円体状筐体20を動かすための所望の軌跡を示し、かつ圧縮音楽データの再生に同期して楕円体状筐体20を動かすための軌跡データを容易に生成でき、音楽に合わせて楕円体状筐体20を動かすための軌跡を容易に得ることができる。
(もっと読む)
動きデータ生成装置、動きデータ生成方法及び動きデータ生成プログラム
【課題】音楽の曲調に同期した動きの動きデータを生成する。
【解決手段】所定の動きパターンに応じた動きパターンデータを記憶しておいて、音楽データを分析して当該音楽データに基づく音楽のビートを検出して、当該検出したビートに基づいて音楽データを複数の小節区間に区切ったとき、当該区切った音楽データの小節区間に対して動きパターンデータを割り当てるようにして、動きデータを生成するようにしたことにより、音楽データと共に動きデータを再生するとき、音楽データMD1に基づく音楽を楽譜で表現したときの、小節に対応する第1の小節区間MS1及び第2の小節区間MS2の切り換えに同期させて、動きパターンを切り換えることができ、かくして、音楽の曲調に同期した動きの動きデータを生成し得る。
(もっと読む)
制御装置、対戦型ロボットシステム、及びロボット装置
【課題】 操作者によって操作されて対戦する複数のロボット装置の制御に関し、種々の工夫を行って趣向性を高めることが可能な制御装置を提供する。
【解決手段】 操作者によって操作されて対戦する複数のロボット装置3、5を制御する制御装置19は、複数のロボット装置3、5のいずれかが操作者によって操作されて攻撃動作が実行される前に、当該攻撃動作が実行されることにより他の対戦相手のロボット装置3、5が受ける物理的影響の度合いが予め定められた範囲内に収まるように、実行される攻撃動作を自動調整する自動調整部23を備える。
(もっと読む)
重心力利用の自動水平制御装置
【課題】水平制御盤の組み合わせで、左右、前後の全傾斜方向に対して水平制御を機能する重心力利用の自動制御装置を提供する。
[0010]
【解決手段】水平制御盤の外郭固定フレームには支持軸を突出して設け、さらに水平制御盤の正面の軸受板を内郭回動フレームに貼着して設け、軸受板には振り子板を固定し、振り子板先端を重力体として内郭回動フレームの回動運動に連動させ、又、水平制御盤は外郭フレームより外側方向に位置して重力体を機能させる構造とする。
(もっと読む)
発音玩具
【課題】 歌唱や伴奏に合わせて動き、カラオケも楽しめる人形を提供することで、飽きることのない玩具を提供する。
【解決手段】 駆動機構を有する人形と、前記人形と一体とされる音声合成装置本体とスピーカ、前記音声合成装置本体内部に設置される音声混合回路から構成され、前記音声合成装置本体はスピーカとハンディマイクとが接続可能であり、前記音声混合回路は、マイク端子から入力されたアナログ信号とオーディオ端子から入力されたアナログ信号をミキサー回路により重ね合わせ、メインアンプを通してから人形の足部に設置されたスピーカから拡声するものであり、ドライバにより駆動機構の動力源への電圧の印加を行い、駆動機構により人形を動作させる発音玩具とするものである。
(もっと読む)
相互サウンド生成玩具
サウンド生成玩具は、擬態化されたアニメーションに応答して操作可能なサウンド生成ユニット20を含む口のアニメーションの自然な形式を擬態するような可動部分を有する生物を表現するように構成される。アニメーションは、玩具内に挿入された手、玩具内で協調するアクチュエータの操作、或いは、遠隔操作装置によって擬態される。装置は、口15のアニメーションに同期可能な音節の配列を生成するサウンド生成ユニット20を作動するスイッチ18を含む。オンセット、コーダ、及び各音節のニュークリアスの継続期間は、全体的に現実的な方式で、視覚的なアニメーション及び聞き慣れた歌、詩の声のパフォーマンス、個々の音節に分けられた言葉のオーディオ事象の他の連続に同期する能力と共に、玩具のユーザによって制御される。 (もっと読む)
玩具
無線リンクを介して、データを送信し、受信するための送受信機(24、28)と、プロセッサ(18、32)と、表現応答を記憶するためのメモリ(34)と、表現応答のための出力部(22、38)とを含み、表現応答に関するトリガーデータを受信し、トリガーデータが受信された場合に表現応答を選択し、前記出力部を介して前記表現応答を表現し、応答が出力されたことを示すトリガーデータを一斉送信するよう動作可能であることを特徴とする玩具が提供される。第2の玩具(12)のある所にある第1の玩具(10)からの第1の表現応答をアクティブにするステップと、前記第1の玩具(10)から前記第2の玩具(12)に、前記第1の表現応答を示すトリガーデータを送信するステップと、前記第2の玩具(12)が、前記データを受信した際に、メモリ(34)から第2の表現応答を選択し、前記第2の表現応答をアクティブにし、前記第1の玩具(10)に対する前記第2の表現応答を示すトリガーデータを送信するステップとを含むことを特徴とする第1(10)及び第2(12)の玩具間の交信の方法が提供される。 (もっと読む)
ロボット装置およびロボット装置システム
【課題】 特定の話者が音声を発する際の癖を表現することにより、話者が伝達しようとする情報を、聴衆に正確に理解させることができるロボット装置を提供する。
【解決手段】 人体各部分の動きと同様の動きを起こさせるアクチュエータ群13と、音声を発するスピーカ12とを備えたロボット装置10であって、入力された文章の各語句について音声合成部33により合成された音声をスピーカ12から発するとともに、その語句が語句/癖対応データベース34に登録されている場合に、その語句に対応する癖データに記憶された人体各部の動きを形体癖模写部35により模写させて音声と動きとを同期させる。
(もっと読む)
1 - 18 / 18
[ Back to top ]