
Fターム[2C480EA07]の内容
プリンタの字間スペース及びラインスペース (4,828) | モータ制御 (691) | 位置制御 (24)
Fターム[2C480EA07]に分類される特許
1 - 20 / 24
記録装置及び記録制御方法
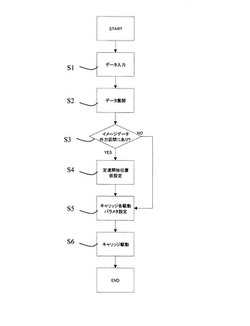
【課題】装置サイズの大型化を招くことなく、外力を受けるキャリッジの加速に伴う振動の影響を低減させ、高品位な記録を行うインクジェット記録装置を提供する。
【解決手段】キャリッジの加速終了後の定速への移行位置を、キャリッジの駆動重量(kg)×0.2(N/kg)以上の外力を受ける区間の区間外に設定する。
(もっと読む)
液体吐出装置、液体吐出システム、及び、液体吐出方法

【課題】 液体の吐出開始・終了位置を適切に設定しうる液体吐出装置、液体吐出システム、及び、液体吐出方法を実現する。
【解決手段】 送り機構によって送られる媒体に対して、移動する前記吐出ヘッドから液体を吐出させる開始位置と終了位置の少なくともいずれか一方を決定するための位置決定制御を実行するコントローラを有し、前記媒体の送り方向先端又は後端から所定範囲内の領域に前記吐出ヘッドから液体を吐出する際と、前記媒体の送り方向中央領域に前記吐出ヘッドから液体を吐出する際とで、前記コントローラによる前記位置決定制御が異なる。
(もっと読む)
印刷装置
【課題】異常時の対応を適切に行う。
【解決手段】駆動対象物を駆動させるモーターと、駆動対象物の速度を検出する検出部と、加速域、定速域、及び、減速域を有する速度プロファイルに基づいて、モーターの駆動を制御する制御部であって、検出部の検出速度と速度プロファイルの速度の差が閾値を超えた場合、駆動対象物の速度が異常であると判断する制御部と、を備え、定速域では第1閾値が設定され、加速域及び前記減速域の少なくとも一部では第1閾値よりも大きい第2閾値が設定される。
(もっと読む)
電子機器
【課題】搬送異常がジャムによる搬送異常であるか否かを適切に判別できるようにする。
【解決手段】本発明が適用された画像形成装置は、記録ユニットが搭載されたキャリッジを主走査方向に搬送すると共に、記録ユニットにインク液滴を吐出させることにより、用紙に対して主走査方向に画像を形成する(S170)。また、キャリッジの搬送を伴う画像形成動作に先駆けては、キャリッジ搬送路における用紙通過領域の始点位置R1を特定すると共に(S140)、搬送開始位置Xsを記憶保持する(S170)。そして、キャリッジの搬送異常が検知されると(S180でYes)、搬送開始位置Xsと、搬送異常の発生位置X0と、用紙通過領域の始点位置R1との位置関係に基づき、キャリッジが用紙端(始点位置)を跨いだか否かを判断し(S295)、跨いでいる場合には、搬送異常がジャムによる搬送異常であると判定して、ジャムに対応した後続の処理を実行する。
(もっと読む)
検出システム、制御システム、画像形成システム及び制御方法
【課題】高精度な位置制御及び速度制御を実現可能とする。
【解決手段】エンコーダ装置40から出力される正弦波のアナログA相及びB相信号を、信号処理回路50で次のように変換する。即ち、信号処理回路50では、アナログA相及びB相信号をディジタル化して無逓倍のディジタルA相及びB相信号を生成すると共に、アナログA相及びB相信号を4倍に逓倍且つディジタル化して、ディジタル逓倍A相信号及びディジタル逓倍B相信号を生成する。更には、ディジタルA相及びB相信号の排他的論理和(XOR)信号を、ディジタルZ相信号として生成する。位置検出部61は、ディジタル逓倍A相信号及びディジタル逓倍B相信号に基づき、対象物の位置を検出する。一方、速度検出部631,632,633は、ディジタルA相信号、又は、ディジタルZ相信号、又は、ディジタルA相及びB相信号の両者に基づき、対象物の速度を検出する。
(もっと読む)
印刷装置、モーター制御装置およびモーター制御方法
【課題】用紙搬送の停止時における停止精度が乱れていた。
【解決手段】少なくとも印刷媒体を搬送するために駆動する搬送モーターと、印刷媒体の搬送経路の所定位置に配設され、搬送経路に供給された印刷媒体に接しつつ搬送モーターの駆動により回転することによって印刷媒体を搬送する搬送ローラーと、搬送ローラーよりも搬送経路の上流側の所定位置に配設され、搬送経路に供給された印刷媒体に接しつつ搬送モーターの駆動により回転することによって印刷媒体を搬送する中間ローラーと、搬送モーターの駆動を制御する制御部とを備え、制御部は、搬送ローラーを回転させるときの搬送モーターの負荷と中間ローラーを回転させるときの搬送モーターの負荷との比較結果に応じた大きさの電流を、印刷媒体が搬送経路上の目標停止位置に到達した場合に搬送モーターに与える構成とした。
(もっと読む)
描画装置、描画装置の描画方法およびプログラム
【課題】複雑な演算処理を必要とすることなく、記録媒体の蛇行に伴う印刷物の品質低下を防止することができる描画装置等を提供する。
【解決手段】記録媒体送り経路に沿って記録媒体Aを送る記録媒体送り手段と、送られてゆく記録媒体Aに臨み、記録媒体Aに印刷を行うヘッドユニット83と、ヘッドユニット83を記録媒体Aの幅方向に移動させるサーボモーター123と、記録媒体送り経路に臨み、記録媒体Aの幅方向におけるエッジ位置の変位量を検出する変位センサー100と、変位センサー100の検出結果に基づいて、ヘッドユニット83が幅方向における記録媒体Aの適正位置に臨むようにサーボモーター123を制御する演算装置200と、を備えたものである。
(もっと読む)
移動体制御装置、画像形成装置、用紙搬送装置及び画像読取装置
【課題】高性能のカウント器やそれに代わるAISCを用いることなく、現在位置Xdetを把握する。
【解決手段】エンコーダー910から出力される2相のパルス信号をそれぞれ検出して計数処理を行う2相カウンタ906と、そのうちのA相パルス信号だけを検出して計数処理を行う1相カウンタ907とを設け、目標位置Xtgtと、それらカウンタによって把握した現在位置との差である位置誤差Xeを算出し、位置誤差Xeに応じた目標速度Vtgtを増幅手段903から出力する一方で、位置誤差Xeについて、比較的小さい値であるのか、比較的大きい値であるのかを誤差判定手段905によって判定し、比較的小さい値である場合には、2相カウンタ906によって現在位置x2を求める一方で、比較的大きい値である場合には、1相カウンタ907によって現在位置x1を求めるようにした。
(もっと読む)
可動部材の駆動制御装置および駆動制御方法ならびに印刷装置
【課題】アクティブダンパのキャリブレーションに要する時間を短縮することのできる可
動部材の駆動制御装置および駆動制御方法を提供する。
【解決手段】可動部材を駆動する駆動手段と、可動部材の位置を検出する位置検出手段と
、可動部材の移動方向における振動を相殺するためのパラメータを利用して、位置検出手
段の検出した位置に応じて駆動手段の駆動状態を制御する駆動状態制御手段と、可動部材
の振動を相殺するための新たなパラメータを検出してその内容を更新するパラメータ更新
手段とを有し、駆動手段が可動部材を駆動する速度として複数の速度モードが設けられ、
パラメータ更新手段は、複数の速度モードに応じてパラメータの検出およびパラメータの
更新を行う。
(もっと読む)
液体噴射装置及び重ね合わせ方法
【課題】位置制御にてPFモータが駆動している場合であっても、重ね合わせ処理を行うことにより印刷時間全体の時間を短縮し、処理の高速化を図る液体噴射装置及び重ね合わせ方法を提供する。
【解決手段】記憶媒体の搬送のために、目標位置から所定の距離より手前までを速度制御で駆動し、続いて目標位置までを位置制御に切り替えて駆動するPFモータ10と、キャリッジを駆動するCRモータ9と、キャリッジの起動開始タイミングが、PFモータ10の速度制御中か位置制御中かを判定し、判定結果によって、異なる時間算出方法を用いて前記キャリッジの起動開始タイミングを算出し、算出された起動開始タイミングとなったとき、CRモータ9を駆動してキャリッジの起動を開始し、記憶媒体の搬送動作とキャリッジ動作とを重ね合わせるCPU21と、を備える液体噴射装置である。
(もっと読む)
モータ制御装置、媒体搬送装置、および画像処理装置
【課題】 モータ或いはその駆動対象に過負荷がかかって制御偏差が大きくなっても、制御応答性を良好に維持しつつ、駆動対象の振動発生を抑制することを目的とする。
【解決手段】 給紙モータを制御するにあたり、位置偏差が小さいレベル(更新停止判定値以下)である限りは第1プロファイルFa(t)に従った目標位置が演算タイミング毎に更新演算されるが、操作量が操作量上限値を超え、且つ、位置偏差が過大(更新停止判定値を超過)となった場合は(時刻ta)、操作量演算部による操作量の演算が停止されて操作量が操作量上限値に固定されると共に、第1プロファイルFa(t)に従った目標速度の更新演算も停止され、目標速度は偏差超過時目標速度Fa(ta)に固定設定される。そして、位置偏差が更新再開判定値以下になると(時刻tb)、操作量演算部による操作量の演算及び第1プロファイルFa(t)に従った目標位置の更新演算が再開される。
(もっと読む)
駆動制御装置及び画像形成装置
【課題】駆動機構のダウンタイムを最小限に抑えかつ印字画像上への影響が現れない駆動動作を実現できる駆動制御装置を提供する。
【解決手段】駆動手段12の駆動時に位置移動制御手段11より駆動手段12に与えられる駆動量と、移動量検出手段13において検出された移動量とから駆動手段12の異常動作を検出する異常動作検出手段14と、位置移動制御手段による駆動手段12の駆動制御を停止するか否か判定する停止判定手段15とを備え、停止判定手段15は異常動作検出手段14の検出結果により駆動手段12の動作が異常であると判定した場合は被駆動体20の位置が目標位置に到達した場合でも停止判定を行わないようにした。
(もっと読む)
記録装置及びキャリッジ駆動制御方法
【課題】 ユーザに対する安全性にも配慮しつつ、種々のキャリッジ駆動条件の制約下でも高精度なキャリッジ駆動を実現して高品位な記録が可能な記録装置とキャリッジ駆動制御方法を提供することである。
【解決手段】 まず、キャリッジモータの駆動を指示し、キャリッジが移動すると、キャリッジの位置と移動速度とを検出する。この指示と検出されたキャリッジ位置と移動速度の情報とに基づいて、キャリッジの移動に対する外乱を推定するとともに、キャリッジ走査経路上における障害の存在を推定する。そして、外乱推定結果を前記指示にフィードバックするとともに、前記障害の存在推定結果に基づいて、キャリッジの走査を緊急停止するよう制御する。
(もっと読む)
ステッピングモータの制御方法、ステッピングモータの制御装置およびプリンタ
【課題】複数の励磁方式でロータを回転駆動させる場合であっても、ステッピングモータ
の駆動に必要なデータ量を低減しつつ適切な駆動が可能となるステッピングモータの制御
方法を提供すること。
【解決手段】ステップ角がそれぞれ異なる複数の励磁方式でロータを回転駆動させるステ
ッピングモータの制御方法において、所定の停止位置に停止しているロータを起動させる
起動制御と、起動制御後にロータを加速させる加速制御とを行うとともに、加速制御では
、少なくとも2つの励磁方式において共通の加速時間データに基づいて、ロータを加速さ
せ、かつ、共通の加速時間データを用いる励磁方式ごとに異なる加速度でロータを加速さ
せ、起動制御では、共通の加速時間データを用いる励磁方式ごとに設定された起動動作デ
ータに基づいて、ロータを起動させる。
(もっと読む)
キャリッジ駆動装置及び記録装置
【課題】サーボ機構のようにキャリッジ位置を所定位置に追従させるような制御を行なう場合や、加速状態や定速状態など、キャリッジ移動の状態がどのようなものでも、キャリッジ駆動装置における動作の異常状態の検出を正確に行なうことができるキャリッジ駆動装置および記録装置を提供することにある。
【解決手段】モータを駆動してキャリッジを移動させる駆動電流を供給する駆動電流供給手段と、前記キャリッジの目標位置を算出する目標位置算出手段と、前記キャリッジの現在位置を検知する現在位置検知手段と、前記目標位置と前記現在位置との差分を検出する誤差検出手段と、前記差分と前記駆動電流に基づいて形成される閾値とを比較する比較手段と、前記差分が前記閾値を越えたとき、警告を発する警告手段とを、有する。
(もっと読む)
紙送り誤差の補正を行うプリンタ
【課題】プリンタの紙送り誤差を補正して画質を向上させることが可能な技術を提供する。
【解決手段】印刷媒体の副走査送り量の補正値を決定するためのテストパターンとして、異なる補正値を用いてそれぞれ印刷される複数のカラーパッチを含むテストパターンを、1種類のインクを用いて100%未満のインクデューティで印刷する。例えば、ブラックインクを用いて、約80%のインクデューティのテストパターンを印刷する。そして、印刷を行う際に、テストパターンの印刷結果に応じて設定された補正値に従って副走査送り量を補正する。
(もっと読む)
印字装置
【課題】 印字用紙のたわみなどによるインク着弾点のバラツキを補正し、高品質な画像を形成する。
【解決手段】 印字用紙の紙間データに対応した最適な印字速度を予め記憶しておき、印字を伴うCR駆動時にCRの位置より最適な速度を算出し印字制御を行う構成とする。
(もっと読む)
記録装置及び記録制御方法
【課題】 インクジェット記録装置において、記録用紙の紙浮き状態や装置内に誤って入った異物がキャリッジと接触する等の異常が発生した際に、速やかにキャリッジ駆動を停止し、キャリッジの破損及びキャリッジの底面に露出している記録ヘッドのインク吐出面の損傷を防止する事を目的とする。
【解決手段】 キャリッジを駆動する際に、位置、速度駆動指令値の算出処理を行ないながら、キャリッジに搭載したエンコーダ情報を利用して、位置、速度情報を取得し、これらをフィードバックし、キャリッジ位置又は速度指令値と現在のキャリッジの位置、速度値との差分情報からキャリッジの駆動状態を判断し、差分値が許容値を越えた際に、キャリッジ駆動を停止させる。
(もっと読む)
逓倍エンコーダー制御回路
【課題】印字時は細かい逓倍パルスで制御し、停止・逆転時は粗い非逓倍パルスで可減速区間を計測して、逆転時に同じ位置から逓倍パルスを出力可能に構成した。
【解決手段】 印字領域に関して、位置エンコーダー出力を逓倍したパルスを用いて往復印字する印刷機において、駆動制御信号を用いて逓倍回路を選択可能にし、非逓倍信号を用いて逓倍信号開始位置の補正を行う回路を有したことを特徴とする逓倍エンコーダー制御回路。
(もっと読む)
シリアルプリンタ
【課題】 加速中印字後のキャリアの減速をスムーズに行うことのできるシリアルプリンタを提供する。
【解決手段】 加速中に印字が終了した場合は、目標の定常速度まで加速を行い、定常速度に到達後に減速を開始し、常にキャリアの速度が一定の状態から減速を始めるので、減速時にキャリアの動作が乱れることがなく、安定した減速が行えることを特徴とする。
(もっと読む)
1 - 20 / 24
[ Back to top ]