
Fターム[2D003BA04]の内容
Fターム[2D003BA04]に分類される特許
1 - 20 / 94
遠隔監視システムの管理サーバ
走行作業機械又は船舶の遠隔監視端末装置
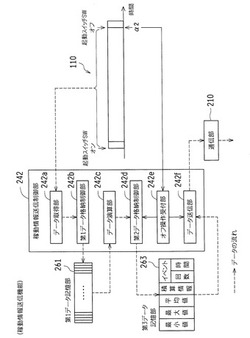
【課題】各センサの最大値、最小値、平均値、スイッチのオン回数などを利用者に把握させることができる走行作業機械又は船舶の遠隔監視端末装置を提供する。
【解決手段】接続端子T,…と、接続端子T,…を介して取得してデータ記憶部260に格納した稼動状態に関するデータに基づいて起動時から最新データ取得時までのデータの最小値、最大値、平均値並びに所定のイベントの発生回数及び発生時間を演算するデータ要約制御部242と、通信部210とを備え、データ要約制御部242は、走行作業機械110又は船舶の起動スイッチSWのオフ操作を受け付けたときに、データ記憶部260が格納している最小値、最大値、平均値並びに所定のイベントの発生回数及び発生時間を通信部210から遠隔監視装置130へ送信する遠隔監視端末装置200。
(もっと読む)
作業機及び作業機のデータ通信システム

【課題】制御装置と携帯端末とのデータ通信のセキュリティを向上させた上で簡単にデータ通信を行うことができるようにする。
【解決手段】本発明の作業機は、携帯用IDコードが保存された携帯端末3との無線通信が可能で且つ作業機用IDコードが保存された制御装置を備え、制御装置は、IDコード取得手段40で取得した携帯用IDコードと作業機用IDコードとの照合を行うIDコード照合手段41と、照合手段によってIDコードの照合が成立したときに携帯端末3と制御装置とのデータ通信を許可すると共に照合が不成立のときにデータ通信を許可しないデータ通信手段42と、、作業機用IDコードを携帯用IDコードとして携帯端末3に登録するIDコード登録手段とを備えている。
(もっと読む)
作業機及び作業機の代金支払い管理システム
【課題】 例えば、作業機の代金支払い実行などによる使用の延長が簡単にでき、場合によっては、使用の制限も行うことができるようにする。
【解決手段】使用期限が記憶された使用期限記憶手段40と、使用期限に達したときに駆動部の動作を制限する動作制限手段41と、使用期限を延長する使用期限延長手段42と、使用期限の延長を許可する許可信号を予め設定された無線通信エリア7に入ったときに受信可能な無線端末4を備え、使用期限延長手段42は、無線端末7が許可信号を受信したときに使用期限の延長を行う。
(もっと読む)
作業機
【課題】様々な使用形態に応じて自由に使用することができると共に使用の制限もできるようにする。
【解決手段】トラクタ、バックホー、コンバイン、移植機などの作業機は、当該作業機を使用することができる残り時間を算出する残り時間算出手段40を備えている。また、この作業機は、残り時間が無くなると駆動部の動作を制限する動作制限手段41と、残り時間の延長を許可する許可信号Sが入力されると残り時間を延長する残り時間延長手段42とを備えている。
(もっと読む)
シリンダの長さの電子的な限界設定によるリッパーアタッチメントの深度制限
【課題】リッパー深度の変更時間を最小限に抑えるシステムを提供する。
【解決手段】リッパー深度制限システム200は、リッパーを上昇下降させるリフト入力、深度限界入力、リッパーリフトシリンダ210,220の位置を感知するリフトセンサー入力、およびリッパーをリッパー深度限界よりも上に保つリッパーリフトシリンダコマンドを生成・実行・修正する制御装置202を含む。深度限界入力は、複数の所定の深度限界から、または最低リッパー深度と最大リッパー深度の間、またはその他の手段によって、リッパー深度限界を選択し得る。リッパー深度制限システム200はまた、ピッチ入力およびリッパーピッチシリンダ230,240の位置を感知するピッチセンサーを含むことができ、制御装置202はリッパーピッチを生成・実行・修正するためのピッチ入力と、リッパーをリッパー深度限界よりも上に保つリフトシリンダコマンドを処理し得る。
(もっと読む)
油圧ショベルの位置誘導システム及び位置誘導システムの制御方法
【課題】本発明の課題は、オペレータへの作業負担を軽減することができる油圧ショベルの位置誘導システム及び位置誘導システムの制御方法を提供することにある。
【解決手段】油圧ショベルの位置誘導システムにおいて、判定部は、油圧ショベルが走行状態であるのか否かを判定する。判定部は、油圧ショベルが走行停止状態から走行状態に変化したと判定したときには、表示部に表示させる案内画面を、作業モードの案内画面(53,54)から、走行モードの案内画面(51,52)に切り換える。作業モードの案内画面(53,54)は、目標作業対象と作業機との位置関係を示す。走行モードの案内画面(51,52)は、作業エリアでの油圧ショベルの現在位置を示す。
(もっと読む)
作業機の動作システム
【課題】一時的に作業機の動作を制限することによって作業機の盗難防止ができるようにする。
【解決手段】作業機2の動作システムは、作業機2の販売管理を行う管理サーバ6と、作業機2に設けられて当該作業機2の制御を行うと共に作業機2の通常制御をロックするロック信号が保持された制御装置と、作業機2に設けられ且つネットワーク8を介して管理サーバ6に接続可能な作業機用無線端末9とを備え、管理サーバ6は、ネットワーク8を介して作業機用無線端末9に通常制御のロックを解除するためのロック解除信号S1を送信するように構成され、作業機用無線端末9は、管理サーバ6が送信したロック解除信号S1を制御装置に出力するように構成されており、制御装置は、ロック解除信号S1が入力されるとロック信号による通常制御のロックを解除するように構成されている。
(もっと読む)
トータルステーション用ターゲット及びそれを用いた建設用作業機械の制御方法
【課題】傾きを考慮した精度の高い水平座標位置データを求めることが可能なトータルステーション用ターゲットを提供する。
【解決手段】本発明のトータルステーション用ターゲット100は、トータルステーションから射出されるレーザー光を反射する光学部110と、光学部110と間の相対位置が変化することがないように固定されると共に、水平面内における第1の軸の周りの傾きを検出する第1傾斜センサ121と、前記光学部と間の相対位置が変化することがないように固定されると共に、水平面内における前記第1の軸と直交する第2の軸の周りの傾きを検出する第2傾斜センサ122と、前記第1傾斜センサ121によって検出された第1検出情報と、前記第2傾斜センサ122によって検出された第2検出情報とを出力する出力部123と、を有することを特徴とする。
(もっと読む)
建設機械の盗難予防装置および盗難予防システム
【課題】建設機械の通信装置に挿設されたSIMカードの抜き取りを判断し、建設機械の盗難を予防できる建設機械の盗難予防装置および盗難予防システムを提供する。
【解決手段】盗難者は、管理者の遠隔操作を無効にしようと、SIMカード55の抜き取りを試みる。SIMカード55に記憶されている識別番号が認識されなければ、通信装置5は管理サーバ2と送受信できない。管理者が油圧ショベル1の異変に気づいて、ロック指令を送信しても、油圧ショベル1はロックされない。このように、従来技術においては、盗難者がSIMカード55を抜き取る行為に対応できない。
本実施形態においては、盗難予防装置6の第2演算処理機能67は、識別番号を認識できないと、指令出力部63を介して車体コントローラ7にロック指令を出力し、油圧ショベル1はロックされる。これにより、油圧ショベル1の盗難を予防できる。
(もっと読む)
パラメータ可視化システム
作業現場上の土工機械の位置を示す三次元位置データを受信し、複数のパラメータの値を含むパラメータ情報を受信するように構成された制御装置を含むパラメータ可視化システムが開示される。複数のパラメータは土工機械と作業現場のうちの少なくとも1つのパラメータを含む。制御装置はさらに、複数のパラメータ内の第1のパラメータの値を提供するように構成された第1の表示信号を生成し、第1のパラメータの値の変更を受信し、第1のパラメータの値の変更に基づき第2のパラメータの値を計算し、作業現場の三次元視覚的描写に沿って第1のパラメータまたは第2のパラメータの少なくとも1つの値の視覚的描写を提供するように構成された第2の表示信号を生成するように、構成される。 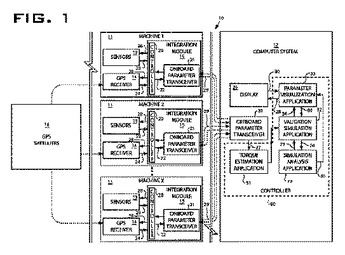 (もっと読む)
(もっと読む)
作業機の情報管理システム
【課題】作業機の情報を簡単に管理することができるようにする。
【解決手段】作業機1の各種情報を電子メールにて送信する情報送信手段51と、各種情報を有する電子メールを複数保存する電子メール保存手段52と、電子メール保存手段に保存された電子メールを受信可能なコンピュータ53とを備え、コンピュータ53は、電子メールを複数受信して当該複数の電子メール内の各種情報を統合する情報統合部55と、情報統合部55により統合した情報を電子メールにて電子メール保存手段52に返信する電子メール返信部56とを備えている。
(もっと読む)
作業機械の適合性確認方法
【課題】作業機械の出荷時に登録された稼働地域特性に応じた機体仕様と、実際の稼働現場の環境情報との適合性を自動的に確認できる作業機械の適合性確認方法を提供する。
【解決手段】位置取得機能および無線通信機能を備えた作業機械11から実際の稼働現場A,B,Cの環境情報(位置、高度および外気温など)を取得して管理部15の動態管理サーバ15aに定期的に送信させ、この動態管理サーバ15aは、作業機械11の出荷時に登録された稼働地域特性に応じた機体仕様(寒冷地仕様機11A、酷暑仕様機11B、防錆仕様機11C)と、実際の稼働現場A,B,Cの環境情報との適合性をチェックする。予め登録された機体仕様と実際の稼働現場A,B,Cの環境情報とが一致しない場合は、動態管理サーバ15aから機体ミスマッチ警告を出力するとともに、顧客管理サーバ15bから販売店4の端末機器などに機体仕様の変更を提案指示する。
(もっと読む)
作業機械における通信制御方法
【課題】通信用電力を必要とする車載コントローラを搭載した作業機械において、バッテリの省電力化を図ることができる通信制御方法を提供する。
【解決手段】作業機械がエンジンキーオフ状態となってから第1の設定時間T1内は、動態管理用コントローラの消費電流を全機能起動可能な作動状態に制御する。作業機械がエンジンキーオフ状態となってから第1の設定時間T1の経過後、第2の設定時間T2内は、動態管理用コントローラの消費電流を、管理部からの呼出が可能な待機状態に制御するとともに、第1のサイクル時間T3毎に作動状態に制御する。作業機械がエンジンキーオフ状態となってから第1の設定時間T1および第2の設定時間T2の経過後は、動態管理用コントローラの消費電流を、管理部からの呼出が不可能な休止状態に制御するとともに、第2のサイクル時間T4毎に作動状態に制御する。
(もっと読む)
作業機械の遠隔管理システム
【課題】エンジン回転数の上限をオペレータによるその上限の設定よりも優先して遠隔管理できる作業機械の遠隔管理システムを提供すること。
【解決手段】油圧ショベルは制御手段10と、3種類の作業モードを選択的に指令する指令スイッチ13とを有し、制御手段10は各作業モードに対応付けられた目標回転数の上限を記憶した目標回転数記憶手段11b1と、記憶された目標回転数の上限のうちの1つを指令スイッチ13による指令に応じ選択し、その上限以下の範囲の目標回転数を演算する目標回転数演算手段11cと、通信装置11aとを有する。基地局2のサーバ3は、作業モード記憶手段3f2により記憶された作業モードの中から1つを入力装置4による指令に応じて選択し通信装置3gを用いて制御手段10に指令する。目標回転数演算手段11cはサーバ3から作業モードを指令された場合、その作業モードに基づき目標回転数を演算する。
(もっと読む)
建設機械
【課題】従来から知られている建設機械では、燃費向上など効率的な運転操作を行うための報知技術に着目しており、作業中にオペレータが行った運転操作の内容に基づいて何らかの制御を変更するものではなかった。
【解決手段】オペレータの疲労度Hを算出する演算式としてH=Ws×Ts十Wr×Tr十Wk×Tkを用いる。ここで、Ws・Wr・Wkはオペレータが旋回・走行・掘削操作をしたとき、単位時間内における作業負荷を表す重み係数である。Ts・Tr・Tkは旋回時間・走行時間・掘削時間の総和である。算出された疲労度Hが所定の閾値を超えたとき(S16)には、運転支援システムを疲労処理モード(S18)に変更する。
(もっと読む)
積込運搬作業現場の車両操作装置
【課題】 積込運搬作業現場における無駄な労力を大幅に低減させることができ、効率的な作業を実現化することのできる車両操作装置を提供しようとする。
【解決手段】 積み込み作業の行える1以上の無線操縦式作業機械4と、積み込み部を備えた複数の無線操縦式運搬車両5,6とに、それぞれ操作指令信号を送信する無線式通信手段3と、それぞれが切り換え機構10,20を備え、その切り換えにより、無線操縦が可能となっている作業機械4及び運搬車両5,6のうちのいずれかの操作指令信号を選択して出力することが可能な複数の操作手段1,2と、複数の操作手段1,2のうち一の操作手段が選択した操作指令信号出力については、他の操作手段がその操作指令信号出力に切り換えても、その切り換えを遮断させる制御を行う制御装置3と、を備えた。
(もっと読む)
制御システム、制御方法、操作制御装置及び作業装置
【課題】被制御体とその周辺にある障害物とが接近していることを操作者に伝えて遠隔制御に係る操作性を向上させる。
【解決手段】ロボット10は、ロボットハンド先端部とその周辺にある障害物との距離Lと、ロボットハンド先端部の移動速度Vを特定し(S1,S2)、ロボットハンド先端部が障害物に接触するまでの推定接触時間を算出する(S3)。ロボット10は、ロボットハンド先端部が障害物に接近している旨を通知する接触情報を操作制御装置20宛てに送信した時から、通信路を経由して接触情報が操作制御装置20に到達するまでの伝送所要時間の予測値Tdを取得する(S4)。ロボット10は、推定所要時間が予測値Tdと規定時間Trとの和以下になると(S5;YES)、接触情報を送信する(S6,S7)。これにより通信遅延の程度に関わらず、操作制御装置20は、現に接触がある前に接触情報に基づき両者の接近を報知する(S8,S9)。
(もっと読む)
作業機械の遠隔診断方法
【課題】端末機器と作業機械とが正しく接続されたことを確認できる作業機械の遠隔診断方法を提供する。
【解決手段】端末機器17を通信回線網16を介し管理部15のサーバ15sに接続し、このサーバ15sを、無線通信網14を介して、端末機器17で指定した作業機械Mの動態管理用コントローラ25に接続する。端末機器17に表示される指示操作にしたがって、作業機械Mを操作する作業者に一定時間内に指示通りの操作をすることを携帯電話17phなどを用いて伝達し、作業機械Mの動態管理用コントローラ25から無線通信網14、サーバ15sおよび通信回線網16を経て端末機器17に送信された一定時間内の実際操作が指示操作と合致するか否かを判定する。一定時間内の実際操作と指示操作とが合致していることを確認することで、指定した作業機械正しく接続されていることを確認する。
(もっと読む)
無線操縦式車両の走行制御方法
【課題】送信機から送信した電波を車両の受信機で受信できなくなった場合に対処できる無線操縦式車両の走行制御方法を提供する。
【解決手段】送信機19から送信した電波により、この電波を受信するラジコン受信機16を搭載した作業機械車両11を無線操縦し、作業機械車両11は、移動しながらGPS受信機17により取得した自身の移動軌跡の位置座標を記録する。送信機19とラジコン受信機16との間で通信用の電波が途絶えたときに、作業機械車両11は、それまでに移動しながら記録した位置座標を逆にたどって、送信機19から送信された電波をラジコン受信機16で受信できる電波到達域A内まで戻る。
(もっと読む)
1 - 20 / 94
[ Back to top ]