
Fターム[2D015HB05]の内容
Fターム[2D015HB05]に分類される特許
1 - 20 / 72
立入禁止区域を有する埋設された公共施設のデータ
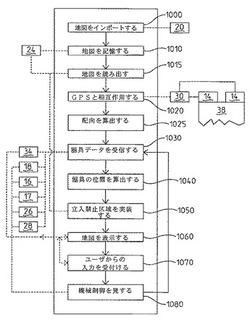
【課題】作業機の場所を特定し、かかる場所を報告された地下の公共施設の場所と比較する作業機で使用するためのシステムを提供する。
【解決手段】本体と、少なくとも一つの地下物体の場所を記述したデータを有する、本体に連結されたコンピュータシステムと、土壌を動かす能力があり、少なくとも一つの地下物体と接触する能力がある本体から延伸する器具と、本体に連結され、コンピュータシステムと通信し、コンピュータシステムが作業機の場所および作業機の配向を特定することができるようにコンピュータシステムに渡されるデータを提供する測位システムと、コンピュータシステムに電気的に連結されたメモリに記憶されたソフトウェアを備える作業機を含む。
(もっと読む)
作動油タンク内液面レベル検知装置

【課題】作業用フロントの変更に伴い、液面低下判定のための基準レベルを容易に変更することが可能となる作動油タンク内液面レベル検知装置を提供する。
【解決手段】作動油タンク9の側面にブロック取付け座25を設ける。このブロック取付け座25に液面低下検出用の検出センサ28を取付けたブロック26を上下位置調整可能に取付ける。ブロック26は油を通す上下貫通孔26bを有する。上部管29の一端を作動油タンク9の上部にタンク内に連通させて接続し、他端をブロック26の上部に貫通孔26bに連通させて接続する。下部管30の一端を作動油タンク9の底部にタンク9内に連通させて接続し、他端をブロック26の下部に貫通孔26bに連通させて接続する。検出センサ28により液面レベルが基準レベル以下であることが検出された場合には警報を発する。
(もっと読む)
建設機械制御システム
【課題】施工計画に対する現況の作業状態や、作業部位に対する作業具の位置関係を容易に把握可能な建設機械制御システムを提供する。
【解決手段】建設機械が作業具7と、該作業具を支持し、該作業具に所要の作動をさせる作業アーム4,5と、第1の撮像部21及び第2の撮像部22を有するステレオカメラ19と、施工計画データを記憶する記憶部と、前記ステレオカメラの位置情報を取得する位置測定部と、3次元表示装置と、制御装置とを具備し、該制御装置は前記施工計画データと前記ステレオカメラ19の位置情報に基づき施工計画画像データを作成し、該施工計画画像データとステレオカメラ19で撮像された現況画像データを重合せ、重合せた合成画像を前記3次元表示装置に3次元表示させる。
(もっと読む)
水中の地盤の斜面を掘削する方法
【課題】水中の透明度に拘わらず、水中の地盤の斜面の上における掘削機の位置を知ることができるようにし、前記斜面の掘削時に前記掘削機が前記斜面の上の設計上予め決められた位置にあることを確認できるようにし、前記掘削機により前記斜面を正確に掘削できるようにすること。
【解決手段】水中の地盤の斜面を掘削する方法は、前記斜面から隔てられた前記地盤の上の位置に架台を配置すること、該架台に掘削機を載せること、該掘削機が載せられた前記架台を前記地盤の上の位置から吊り上げ、前記斜面の上へ吊り下ろすこと、前記斜面の上における前記掘削機の位置を測定すること、該測定の結果に基づき、前記斜面の上における前記掘削機の位置をモニターに表示すること、該モニターに表示された前記掘削機の位置を監視しつつ前記掘削機により前記斜面を掘削することを含む。
(もっと読む)
建設機械制御システム
【課題】簡単な機器構成で作業部位に対する作業具の位置、状態を正確に把握し得る建設機械制御システムを提供する。
【解決手段】建設機械が作業具7と、該作業具7を支持し、該作業具7に所要の作動をさせる作業アーム5とを具備し、作業具7、作業アーム5は同一の回転平面内を作動する様構成され、作業アーム5にラインレーザ照射部23が設けられ、該ラインレーザ照射部23から照射されるラインレーザ24が形成する平面は前記回転平面内にあり、ラインレーザ24は作業部位に照射され、作業部位に基準線24aを形成する様に構成された。
(もっと読む)
作業車両の周辺監視装置
【課題】本発明の課題は、作業車両の走行時に作業車両の位置をオペレータが容易に認識することができる作業車両の周辺監視装置を提供することにある。
【解決手段】周辺監視装置の俯瞰画像作成部は、作業車両1が停止状態であるときには、第1仮想投影面31を用いて俯瞰画像を作成する。第1仮想投影面31の少なくとも外縁部は、作業車両1から遠ざかるほど地面からの高さが高くなる形状である。作業車両1が走行状態であるときには、俯瞰画像作成部は、第2仮想投影面32を用いて俯瞰画像を作成する。第2仮想投影面32の少なくとも外縁部は、地面からの高さが一定の平坦な形状である。
(もっと読む)
作業車両の周辺監視装置
【課題】車体と車体周辺の物体との位置関係をカメラ画像上で容易に判断可能な周辺監視装置を提供する。
【解決手段】周辺監視装置10は、カメラ画像と、カメラ画像上の地面に垂直投影される車体(ベッセル4を含む)の外縁を示す車体外縁線BLと、をモニタ30に表示させる表示制御部40を備える。
(もっと読む)
掘削機械の表示システム及びその制御方法。
【課題】本発明の課題は、案内画面に表示される表示対象面と掘削機械との位置関係を容易に把握することができる掘削機械の表示システム及びその制御方法を提供することにある。
【解決手段】掘削機械の表示システムでは、上部境界線Laの位置と下部境界線Lbの位置とが算出される。上部境界線Laは、表示対象面78の断面の上端の高さ位置を示す。下部境界線Lbは、表示対象面78の断面の下端の高さ位置を示す。掘削機械の現在位置Poと、上部境界線Laあるいは下部境界線Lbとの上下方向の位置関係によって、表示範囲の基準点Pbが設定される。
(もっと読む)
建設車両周辺の作業者検出装置
【課題】カメラ画像と距離センサーを併用し、作業者であることをと建設機械からの距離を同時に認識することができるとともに、センサーが作業者に向いていない場合の誤認識を無くして、比較的簡易な装置で、正確な検知を行うことがでる建設車両周辺の作業者検出装置を提供する。
【解決手段】建設機械の周辺の広域画像を得るため複数台を並べて配置して工事車両周辺の画像を撮影しパソコンに送るカメラ1と、工事車周辺のものまでの距離を測定し、パソコンに送るレーザー距離計2と、カメラとレーザー距離計の3次元姿勢を測定し、パソコン4に送る3次元姿勢センサー3と、データの処理、危険の判断、警告の発令、モニターへの表示を行うパソコン4とからなる。
(もっと読む)
建設機械の燃料残量検出装置
【課題】シール手段を不要としつつ、残量燃料を広範囲に検出することができる建設機械の燃料残量検出装置を提供する。
【解決手段】下部走行体1と、下部走行体1上に旋回可能に設けられた上部旋回体2と、上部旋回体2に俯仰可能に設けられた作業機4と、上部旋回体2に搭載されエンジンの燃料を貯える燃料タンク27とを備えた油圧ショベルに設けられ、燃料タンク27内の燃料残量を検出する燃料残量検出装置35において、燃料タンク27の上板側に取付けられたベース37と、ベース37に連結され上下方向に伸縮可能なパンタグラフ構造のアーム38と、アーム38の先端側に装着され燃料タンク27内の燃料の液面位置に追従してアーム38を伸縮させるフロート39と、アーム38を構成する第1リンク部材40aの回動角を検出する角度センサ45とを備える。
(もっと読む)
油圧ショベルの作業可能範囲表示装置とその制御方法
【課題】本発明の課題は、車両本体の姿勢が傾いていても適切な作業可能範囲を表示することができる油圧ショベルの作業可能範囲表示装置を提供することにある。
【解決手段】油圧ショベルの作業可能範囲表示装置において、演算部は、到達可能範囲から車両下部領域を除いた作業可能範囲を算出する。到達可能範囲は、作業機が届くことができる範囲を示す。車両下部領域は、車両本体の下方に位置する領域である。表示部は、作業可能範囲を表示する。演算部は、車両本体の傾きに応じて作業可能範囲と車両下部領域との境界線を設定する。
(もっと読む)
油圧ショベルの位置誘導システム及び位置誘導システムの制御方法
【課題】本発明の課題は、オペレータへの作業負担を軽減することができる油圧ショベルの位置誘導システム及び位置誘導システムの制御方法を提供することにある。
【解決手段】油圧ショベルの位置誘導システムにおいて、演算部は、接近離れ判定距離(D1)を算出する。接近離れ判定距離(D1)は、目標作業対象(70)と作業機(2)のリーチ範囲との間の距離を示す。演算部は、接近離れ判定距離(D1)が所定の閾値以下であるときには詳細モードの案内画面を表示部に表示させる。また、接近離れ判定距離(D1)が所定の閾値より大きいときには詳細モードよりも広範囲を示す広域モードの案内画面を表示部に表示させる。
(もっと読む)
油圧ショベルの位置誘導システム及びその制御方法
【課題】本発明の課題は、油圧ショベルを作業に適した位置まで容易に移動させることができる油圧ショベルの位置誘導システム及びその制御方法を提供することにある。
【解決手段】油圧ショベルの位置誘導システムにおいて、最適作業位置演算部は、目標面(70)と作業可能範囲(76)との重なり合う掘削可能範囲(79)が最大となる車両本体の位置を最適作業位置として算出する。表示部は、最適作業位置を示す案内画面を表示する。
(もっと読む)
油圧ショベルの表示システム及びその制御方法
【課題】本発明の課題は、掘削作業を精度よく行うことを可能とする油圧ショベルの表示システム及びその制御方法を提供することにある。
【解決手段】油圧ショベルの表示システムは演算部と表示部とを有する。演算部は、バケット(8)の刃先の位置と設計面(45)の位置情報とに基づいて、刃先の幅方向における位置(C1−C5)の中で設計面(45)への最近接位置と設計面(45)との間の距離を算出する。表示部は案内画面を表示する。案内画面は、設計面(45)とバケット(8)の刃先との位置関係を示す画像と、最近接位置と設計面(45)との間の距離を示す情報とを含む。
(もっと読む)
油圧ショベルの表示システム及びその制御方法
【課題】本発明の課題は、オペレータが目標面を精度よく成形することが容易になる油圧ショベルの表示システム及びその制御方法を提供することにある。
【解決手段】油圧ショベルの表示システムにおいて、演算部は、油圧ショベルの現在位置に関する情報に基づいてバケットの刃先の位置を算出する。演算部は、設計面の位置情報に基づいて、目標面線82と設計面線81と目標面線82の延長線83との位置を算出する。目標面線82は、設計面から選択された目標面の断面を示す線である。設計面線81は、目標面以外の設計面の断面を示す線である。表示部は、案内画面を表示する。案内画面は、設計面線81と目標面線82と目標面線82の延長線83とバケットの刃先の位置とを示す画像を含む。
(もっと読む)
掘削機械の表示システム及びその制御方法。
【課題】本発明の課題は、案内画面に表示される表示対象面と掘削機械との位置関係を容易に把握することができる掘削機械の表示システム及びその制御方法を提供することにある。
【解決手段】掘削機械の表示システムでは、上部境界線Laの位置と下部境界線Lbの位置とが算出される。上部境界線Laは、表示対象面78の断面の上端の高さ位置を示す。下部境界線Lbは、表示対象面78の断面の下端の高さ位置を示す。掘削機械の現在位置Poが上部境界線Laと下部境界線Lbとの間に位置するときには、表示範囲の所定の基準点Pbが、上部境界線Laと下部境界線Lbとの間の所定位置に設定される。掘削機械の現在位置Poが上部境界線Laよりも上方に位置するときには、基準点Pbが所定位置よりも上方に設定される。掘削機械の現在位置Poが下部境界線Lbよりも下方に位置するときには、基準点Pbが所定位置よりも下方に設定される。
(もっと読む)
油圧ショベルの表示システム及びその制御方法
【課題】本発明の課題は、目標面と油圧ショベルとの位置関係を容易に把握することができる油圧ショベルの表示システム及びその制御方法を提供することにある。
【解決手段】油圧ショベルの表示システムにおいて演算部は、地形データに対して案内画面として表示する所定の表示範囲55を設定する。案内画面は、表示範囲55に含まれる目標面の側面視における断面と油圧ショベルの現在位置とを示す。演算部は、地形データと作業機データと車両本体の現在位置とに基づいて、目標面の側面視における断面において、車両本体に最も近い始点Psの位置と、始点Psから作業機の最大リーチ長さ離れた終点Peの位置とを算出する。演算部は、表示範囲55の所定の基準点Pbの位置を始点Psと終点Peとの位置に基づいて算出する。
(もっと読む)
建設機械
【課題】架線切断事故が起き難い建設機械を提供することである。
【解決手段】ブーム及びブーム先端側に設けられた作業用具を具備する建設機械において、前記ブームの水平方向に対する傾斜角を検出できる傾斜センサと、前記傾斜センサによる前記ブームの傾斜角が設定値に至った場合、そのことを報知する報知手段とを具備してなる。
(もっと読む)
音響処理システム及びこれを用いた機械
【課題】機械周囲の人物の安全のために、抽出すべき位置の人物の音声を抽出し、危険回避にとって有用な音声を瞬時的に抽出するための音響処理システムを提供する。
【解決手段】音響処理システムにおいて、音を収音する複数のマイクロホンからなる音入力部201と、機械の動作による周囲の人物または物体との接触に伴う危険度を算出する危険度算出部206と、前記音入力部201から出力された信号を入力として前記危険度算出部206で算出された危険度に応じた分離信号を出力する音抽出部203と、前記音抽出部203から出力された分離信号を出力する音出力部219と、を有する。
(もっと読む)
受光器
【課題】
バックホウ等の建設機械を用いて掘削する際、掘削高さを検知する掘削支援装置において基準面に沿って出射するレーザ光を受光する受光器が、アームが傾斜した状態において良好に受光できる受光器を提供する。
【解決手段】
建設機械を用いた掘削作業を支援する装置であって、掘削箇所近傍に設置され、レーザ光を基準面に沿って出射する投光器のレーザ光を、受光する受光部を長手方向に沿って複数有し、アームに取り付けられる受光器の中の受光素子を傾斜させて取り付ける。
(もっと読む)
1 - 20 / 72
[ Back to top ]