
Fターム[2F062AA85]の内容
機械的手段の使用による測定装置 (14,257) | 測定内容 (2,477) | 角度 (231) | 方向、向き (11)
Fターム[2F062AA85]の下位に属するFターム
表裏 (1)
回転方向
Fターム[2F062AA85]に分類される特許
1 - 10 / 10
位置計測装置及び位置計測システム
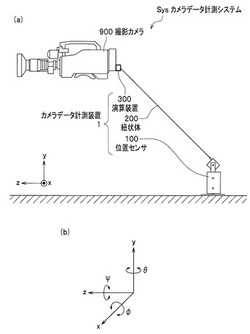
【課題】本発明は、機動性に優れ、平坦でない計測基準面でも、高い精度で位置を素早く計測できる位置計測装置を提供する
【解決手段】カメラデータ計測装置1は、紐状体200の紐長変化量と紐状体の紐方向とを計測する位置センサ100と、両端が位置センサ100と撮影カメラ900とに接続された紐状体200と、紐長変化量及び紐方向に基づいて、撮影カメラ900のカメラデータを計測する演算装置300とを備え、演算装置300が、紐長初期値L0と位置センサ100で計測された紐長変化量ΔLとの和を紐方向での紐全長Lとして求め、求めた紐方向での紐全長Lを3次元方向成分に分解することで、撮影カメラ900の位置を示す3次元座標を算出する。
(もっと読む)
幾何誤差計測システム

【課題】不適切な幾何誤差に基づく補正の実行により多軸工作機械の加工精度が低下する事態を、きわめて効果的に防止することが可能な幾何誤差計測システムを提供する。
【解決手段】幾何誤差計測システムSは、予め幾何誤差の閾値を設定可能な閾値記憶領域25と、同定した幾何誤差が閾値を上回っている場合にその事態を報知する出力手段32と、幾何誤差設定値を更新記憶可能なパラメータ記憶領域26とを有している。そして、新たな幾何誤差の計測後に、その計測値に、パラメータ記憶領域26に記憶されている幾何誤差設定値を加算することによって、新たな幾何誤差設定値を算出するとともに、新たに計測された幾何誤差あるいは算出された新たな幾何誤差設定値の内のいずれか一方が閾値を上回っている場合には、幾何誤差設定値を自動更新せず、手動による新たな幾何誤差設定値の設定を可能とする。
(もっと読む)
3次元表面形状算出装置およびそれを用いた自動施工装置ならびにその方法
【課題】1回の走査で精度よく測定対象表面の3次元表面形状を算出することができる3次元表面形状算出装置を提供する。
【解決手段】3次元表面形状算出装置1は、センサ基台6と、先端に球形状を1方向に移動できる変位センサ2と、原点を定めた3次元空間で平面方程式算出点22を囲む3点の接触点に変位センサ2を接触させてセンサ基台6を移動させる演算部8とを備え、演算部8は、センサ球2の移動距離である変位信号200およびセンサ基台6の原点からの方向ならびに距離を用いて3点の球中心座標を求め、1点の球中心座標から他の2点の球中心座標へ向かう2つのベクトルの外積である法線ベクトルの単位ベクトルに球形状の半径を乗したベクトルを求め、このベクトルを球中心座標に加えて接触点の座標を求め、この接触点の座標が囲む平面方程式を算出する。
(もっと読む)
形状測定方法
【課題】高精度でなく安価な姿勢変更機構でも、被測定物を高精度に測定することができる形状測定方法を提供する。
【解決手段】被測定物Wを載置したテーブル14の姿勢を傾ける姿勢変更機構4を備え、プローブによって被測定物の形状を測定する形状測定方法。テーブル14の被測定物載置面14Aに3つの基準球21,22,23を互いに離間して配置し、この3つの基準球をプローブによって測定して各基準球の中心座標を求め、これら中心座標を含む姿勢変更前基準面を算出する。次に、姿勢変更機構を動作させてテーブルの姿勢を傾けたのち、3つの基準球をプローブによって測定して各基準球の中心座標を求め、これら中心座標を含む姿勢変更後基準面を算出する。そして、姿勢変更前基準面と姿勢変更後基準面とから姿勢変更機構により傾けられたテーブルの姿勢傾き量を算出する。
(もっと読む)
測定機、及びフィルタ装置
【課題】測定条件に応じて測定機の共振特性が変化する場合であっても適切に測定誤差を低減させることができる測定機の提供。
【解決手段】三次元測定機1は、三次元測定機本体2と、ホストコンピュータ3とを備える。ホストコンピュータ3は、測定値にデジタルフィルタを適用して三次元測定機本体2の共振特性に基づく測定誤差の影響を低減するフィルタ装置4を備える。フィルタ装置4は、三次元測定機本体2の共振特性を変化させるパラメータを取得するパラメータ取得部41と、パラメータ取得部41にて取得されるパラメータに基づいて、三次元測定機本体2の共振特性の変化に追従するデジタルフィルタを設計するフィルタ設計部42と、フィルタ設計部42にて設計されたデジタルフィルタを測定値に適用するフィルタ処理部43とを備える。
(もっと読む)
捻れ計測装置及びそれを用いた捻れ測定方法
【課題】計測結果にバラツキが生じないようにすることが可能な捻れ計測装置及びそれを用いた捻れ計測方法を提供すること。
【解決手段】本発明の捻れ計測装置1は、軸を中心に回動可能であり、立った状態の人体を載せるための回動部1aと、回動部1aの回動角度を検出するための回動角度検出部1bと、回動部1aの回動中心を通るように、回動部1aの上面から傾動可能に略垂直に立脚し、人体が回動部1aに載った際、人体の両足に挟まれ得る垂直立脚部7とを備え、両肩が固定された状態で人体の捻れ度合いを測定することができる。
(もっと読む)
ワーク測定方法及びその装置
【課題】本発明の目的は倣いプローブによるポイント測定が高精度に行えるワーク測定装置を提供することにある。
【解決手段】ワーク測定面20に対し倣いプローブ12を予め設定されたアプローチ方向から接触させた際に倣いプローブ12からの変位量及び座標値検出手段16からの座標値を収集させる測定制御手段24と、該変位量に基づきワーク測定面20の法線方向を算出する法線算出手段26と、該法線方向と該アプローチ方向との角度差が閾値よりも大の場合は該アプローチ方向が不適切と判断する判定手段28と、不適切と判断された場合は該角度差に基づき倣いプローブ12のワーク測定面20へのアプローチ方向がワーク測定面20の法線方向となるように該アプローチ方向の設定を修正し、該測定、該法線算出及び該判定の再実行を指示する指示手段30とを備えたことを特徴とするワーク測定装置10。
(もっと読む)
角度測定用ダミーチップ
【課題】電気配線が不要で、簡単な構成で且つ安価な角度測定用ダミーチップを提供することを課題とする。
【解決手段】角度測定用ダミーチップは、軸部材32、ボール部33、筒部材34、当接部35、揺動側ゲージ部材37、固定側ゲージ部材38及び固定側ゲージ部材38と揺動側ゲージ部材37との少なくとも一方に備える目盛39で構成する。
【効果】揺動側ゲージ部材37に備えた目盛39に対して、固定側ゲージ部材38の外縁の重なり数を測定することで、ワークに対する電極チップの当接角度を簡単に確認することができる。
(もっと読む)
平面度測定方法と装置
【課題】 簡単な構成で、効率的に平面度を求めることができる平面度測定方法と装置を提供する。
【解決手段】 互いに直交する方向の傾斜を検知する傾斜計12と、傾斜計12が取り付けられた本体14と、本体14の下面14aから突出した3点の測定子15,16,17と、傾斜計12により検知した傾斜を記憶しその傾斜の測定子間の距離から測定対象部位の変位を求めるコンピュータ等の演算手段とを備える。傾斜計12は、傾斜により動く電極間の静電容量の変化を2方向同時に検知する。3点の測定子15,16,17を測定対象面20に載置し、測定子15,16,17のうちの1点に対する他の2点の平面上での位置と傾斜を検知し、次に本体14を移動させて、先に検知した2点のうちの少なくとも1点に測定子16を合わせて、測定対象面20の他の点の変位を検知する。
(もっと読む)
位置決め機械上の測定または較正の実行方法
【課題】機械の較正を行うために用いられる装置もしくは機械自身として用いられる装置について記述される。
【解決手段】装置は、2つの構造体を具え、その各々は、その上に三角形状に間隔を置いて配置された3つの支持部を有する。支持部は、ボールもしくはソケットとすることができる。構造体は6つの部材によって相互に接続され、各々の支持部には2つの部材の端部が接続される。較正デバイスとして用いる場合には、部材を伸縮駆動される測定バーとし、構造体をそれぞれ機械の固定部および可動部に接続すれば、機械の部分の変位が構造体間の相対変位を生じさせ、測定バーの長さを変化させる。機械として用いる場合には、部材を構造体の一方によって動力が供給される支柱とする。その構造体は、ワークピースに対し工具またはプローブを相対的に位置づけるべく工具またはプローブを保持して他方の構造体に対し相対的に操作されるものとすることができる。
(もっと読む)
1 - 10 / 10
[ Back to top ]