
Fターム[2F062EE33]の内容
機械的手段の使用による測定装置 (14,257) | 測定方法 (2,962) | 速度、角速度を測定するもの (9)
Fターム[2F062EE33]に分類される特許
1 - 9 / 9
表面性状測定機
【課題】測定アームに最適な測定力を発生させる表面性状測定機を提供する。
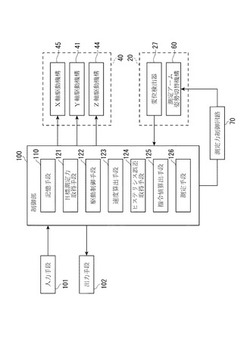
【解決手段】表面性状測定機は、ブラケットに回転軸を支点として円弧運動可能に支持される測定アーム、測定アームの先端に設けられたスタイラス、及び、測定アームを円弧運動方向へ付勢するボイスコイルを備え、スタイラスに測定力を付与する測定アーム姿勢切替機構60を備えるスタイラス変位検出手段20と、制御部100と、を具備し、制御部100は、ヒステリシス誤差を取得するヒステリシス誤差取得手段124と、目標測定力を取得する目標測定力取得手段121と、目標測定力及びヒステリシス誤差に基づいて、測定力指令値を算出する指令値算出手段125と、測定力指令値に基づいてボイスコイルに電流を入力する駆動制御手段122と、を備える。
(もっと読む)
産業機械および産業機械の制御方法

【課題】 制御対象物を適切に制御できない場合であっても、制御対象物の移動を確実に停止できる産業機械および産業機械の制御方法を提供する。
【解決手段】 三次元測定機1は、所定の軸方向へ制御対象物を移動させる移動機構2と、移動機構2を制御する制御装置3とを備えるものであって、制御装置3は、制御対象物の軸方向への移動を停止させる停止手段30を有し、停止手段30は、制御対象物の軸方向への移動速度を監視する速度監視部302と、制御対象物の軸方向への移動速度が所定の閾値を超えているか否かを判定する判定部303と、制御対象物の軸方向への移動速度が所定の閾値を超えている場合に、制御対象物の移動を停止させる停止部304とを備える。
(もっと読む)
接触式の座標位置決め装置の測定サイクルを最適化する方法
測定プローブ(4)を備える座標位置決め装置によって獲得すべき表面位置測定に最適のスタンドオフ距離(74)を計算する方法について説明する。座標位置決め装置は、工作機械を備えることができ、前記測定プローブ(4)は、可撓性のスタイラス(12)を有するタッチトリガプローブを備えることができる。この方法は、座標位置決め装置の少なくとも1つの測定された加速特性を使用して最適のスタンドオフ距離(74)を計算するステップを含む。このようにして、測定サイクル時間を最適化することができる。
 (もっと読む)
(もっと読む)
V溝形状測定方法および装置
【課題】回転テーブル上の被測定物のV溝形状の特性値を正確かつ確実に測定する。
【解決手段】測定子方向一定制御工程と、回転テーブル半径一定倣い制御工程と、2面接触倣い制御工程とを組み合わせ、被測定物のV溝を構成する2面に、常に倣いプローブ22の測定子24を接触させるV溝回転テーブル倣い制御工程を行い、プローブ22の倣い進行方向を、プローブ22の測定子24の中心位置の軌跡から求めて、倣い制御処理を行う。
(もっと読む)
試料の表面形状の測定方法及び装置
【課題】試料には強い力をかけずに探針のとびを抑制できる試料の表面形状の測定方法及び装置を提供する。
【解決手段】センサによる被測定表面上における探針の垂直方向の変位の検出と、探針の変位の検出に基いた探針の速度及び加速度の算出と、及び探針の速度及び加速度の少なくとも一方のリアルタイムでのモニターによる探針のとびの検出と、探針の針圧発生装置への電流制御とから成る制御操作を短時間で行い、探針が空中にあるときにだけ探針にかける針圧を増大し、探針が試料に再び触れる前に探針の針圧を元の状態に戻す。
(もっと読む)
多数の測定点の空間座標を判定するための方法および装置
測定対象(26)の輪郭(25)に沿った多数の測定点(24)の空間座標を判定するために、プローブ(20)で移動可能に支承された探触素子(22)を有するプローブ(20)が用意される。プローブ(20)が輪郭(25)に沿って移動するとき、プローブ(20)の位置測定値(28〜32)と、プローブ(20)に対して相対的な探触素子(22)の変位量(70)が判定される。位置測定値(28〜32)と変位量(70)とから輪郭(25)に沿った測定点(24)の空間座標が判定される。定義された接触力をアクチュエータ(62)によって生成することによって、プローブ(20)の移動時に探触素子(22)が輪郭(25)と接触保持される。本発明の1態様によれば、プローブ(20)に対して相対的な探触素子(22)の加速度(105;134)に依存して接触力が設定される。
(もっと読む)
座標測定器による表面のスキャニング
本発明は、座標測定器(23)を用いて、加工物の表面を走査する方法であって、座標測定器(23)の走査部品(64)が、当該の表面と接触するとともに、走査部品(64)が、当該の表面に沿って接触を維持しながら移動(スキャニング)する方法に関する。座標測定器(23)には、加工物に関する走査部品の実行可能な動きの互いに独立した複数の自由度、例えば、直線軸の自由度が存在する。それらの自由度に関して、各自由度に関する走査部品(64)の移動速度成分の最大値を表す最大速度値を定義する。加工物の計画しているスキャニングに関して、そのスキャニングの際に走査部品(64)を動かすべき予測経路(スキャニング経路)を予め規定し、その場合実際のスキャニング経路が、加工物の実際のサイズに依存して、この予測したスキャニング経路からずれる可能性が有る。異なる自由度に関する最大速度値を考慮して、走査部品(64)の速度値を一定として、予測したスキャニング経路を通過させて行くことが可能なスキャニング速度の最大値を計算する。  (もっと読む)
(もっと読む)
座標測定機械及び座標測定機械を操作するための方法
本発明は、座標測定機械を操作するための方法及び座標測定機械に関し、この場合、少なくとも1つの電気モータMによって駆動される座標測定機械の座標測定装置、特に測定ヘッドは、少なくとも1つの方向に動くことが可能である。電気モータMの運動、このようにして、座標測定装置の運動を行うために、電気モータMを通して(ラインC11、C21の電流回路を介して)流れる駆動電流が測定される。電気モータMの運動又は座標測定装置5の運動が進行すべき目標速度に基づいて及び/又は目標加速度に基づいて、駆動電流について限界値が検出される(コンピュータPC及び/又はマイクロコントローラMCで)。駆動電流が検出された限界値IΤに達した場合及び/又は駆動電流が検出された限界値IΤを超えた場合、例えば、コンピュータPC又はマイクロコントローラMCが、電流回路に配置されたスイッチSW1、SW2の一方をオフにすることによって、座標測定装置5は所定の状態に設定される。  (もっと読む)
(もっと読む)
強化された手動制御によるCMMアーム
本発明は、外郭が設けられた強固CMMアーム用装置に関し、内部CMMアームと、内部CMMアームを、1つ以上の内部ボリュームが、固体対象物および流体の進入に対してシールされるように、複数の伝達手段を介して駆動する外郭を備える。本発明はまた、RCAの触覚制御にも関する。 (もっと読む)
1 - 9 / 9
[ Back to top ]