
Fターム[2F062FF28]の内容
機械的手段の使用による測定装置 (14,257) | 走査 (1,305) | 走査の種類 (130) | 走査経路を設定するもの (96) | 被測定物表面に基づくもの (75)
Fターム[2F062FF28]に分類される特許
21 - 40 / 75
補正ボール径算出方法および形状測定装置
【課題】解析精度を向上させることができる補正ボール径を算出できる補正ボール径算出方法および形状測定装置を提供すること。
【解決手段】本発明によれば、基準ゲージを回転させながら該基準ゲージを測定することにより補正ボール径を算出する。そのため、基準ゲージを回転させながら測定することにより生じる誤差を含んだ補正ボール径を算出することができる。また、基準ゲージの複数の高さ位置を測定することにより各高さ位置毎に補正ボール径を算出する。そのため、測定する高さ位置に応じて生じる誤差を含んだ補正ボール径を各高さ位置毎に算出することができる。従って、被測定物Wを回転させながら測定した際に、これらの誤差を含んだ補正ボール径を用いて被測定物Wの形状等を解析することで、被測定物Wの形状等を高精度に解析することができる。
(もっと読む)
形状測定機、及び形状測定方法

【課題】被測定物の形状を適切に測定することができる形状測定機、及び形状測定方法の提供。
【解決手段】三次元測定機1は、被測定物に当接する測定子と、測定子を移動させるスライド機構24、及び駆動機構25と、スライド機構24、及び駆動機構25を制御するホストコンピュータ5とを備える。ホストコンピュータ5は、測定子の内部に設定された所定の点を仮測定点として仮測定点の位置を時系列で取得する仮測定点取得手段51と、仮測定点取得手段51にて取得された仮測定点の位置と、測定子の表面形状をモデル化した測定子モデルとに基づいて、測定点の位置を推定して取得する測定点推定手段52とを備える。測定点推定手段52は、対象モデル配置部521と、領域設定部522と、前後モデル配置部523と、範囲設定部524と、測定点取得部525とを備える。
(もっと読む)
表面性状測定装置、その接触子モデル生成方法、及びプログラム
【課題】高精度で3次元接触子モデルを生成可能な表面性状測定装置、その接触子モデル生成方法、及びプログラムを提供する。
【解決手段】表面性状測定装置は、被測定物に先端が接触可能な接触子24と、接触子24を互いにX軸、Y軸、Z軸に沿って移動させる制御部41とを備える。制御部41は、接触子24を被測定物の表面に倣うように駆動すると共に接触子24の先端位置を疑似測定点Piとして取得する。制御部41は、基準ワーク4を接触子24で倣い測定して3次元接触子モデルM2を算出する。制御部41は、接触子24を、Z軸を中心として回転駆動する。制御部41は、回転駆動される接触子24の複数の回転位置のそれぞれにおいて、接触子24をX軸方向及びZ軸方向に沿って移動させて基準ワーク4を倣い測定して疑似測定点Piを取得し、取得された疑似測定点Piに基づいて3次元接触子モデルM2を算出する。
(もっと読む)
三次元測定機
【課題】測定条件を変更した場合であってもプローブの移動量を適切に補正することができる三次元測定機の提供。
【解決手段】三次元測定機は、一定の範囲内で移動可能に構成される測定子を有するプローブと、プローブを移動させる移動機構と、移動機構を制御する制御装置とを備える。制御装置は、移動機構の移動量、及びプローブの移動量に基づいて測定子の位置を算出する測定値算出部53を備える。測定値算出部53は、被測定物を測定するときの測定条件に基づいて、プローブの移動量を補正するための補正パラメータを算出する補正パラメータ算出部531と、補正パラメータに基づいて、プローブの移動量を補正する補正部532と、移動機構の移動量と、補正部532にて補正されたプローブの移動量とを合成することで測定子の位置を算出する移動量合成部533とを備える。
(もっと読む)
玉型形状測定方法及びその装置
【課題】全体が大型化せずに大きな玉型形状の測定ができる玉型形状測定方法及びその装置を提供すること。
【解決手段】回転軸線(回転中心O5)の周りに回転可能であると共に回転軸線に対して半径方向に進退移動可能な測定子(玉型用測定子36,レンズ枠用測定子37)をメガネMの玉型であるレンズ枠(RF,LF)の内周面又はメガネMの玉型である眼鏡レンズや型板(玉型Lm即ち玉型ML,MR)の外周面に当接させると共に、この当接状態で測定子を玉型の当接面に沿って周方向に移動させて、玉型の玉型形状の幾何学中心から測定子までの距離の変化である動径ρi(i=0,1,2,・・・n)を玉型形状の全周に亘って測定させるようになっている。しかも、玉型の測定領域において測定子で玉型形状を測定可能な位置まで回転軸線を移動させて、各測定領域毎に前記玉型形状を前記測定子で測定させるようになっている。
(もっと読む)
眼鏡レンズ枠形状測定装置
【課題】眼鏡レンズ枠形状測定装置において、そり角度の大きなレンズ枠の形状測定結果に対して、定量的な補正を可能とする。
【解決手段】演算制御回路52が、入力部56に入力されたそり角度θ1、倒れ角度θ2、倒れ量h、眼鏡レンズ枠LF,RFの縦方向の長さB、定数α,βなどの値により、保持棒3b4,3b6で保持された状態における眼鏡レンズ枠LF,RFの軸ずれの量または角度θ3を求め、測定して得られた眼鏡レンズ枠LF,RFの形状を、求められた軸ずれの量または角度に応θ3じて補正することで、精度のよい測定結果を得る。
(もっと読む)
眼鏡枠形状測定装置
【課題】 装置の大型化を抑え、高カーブフレーム、ブリッジが前面に迫り出したタイプのフレーム等も両枠トレースを可能にする。
【解決手段】 眼鏡枠形状測定装置は、フレームの左右レンズ枠を装用時の上下方向から保持する第1スライダーと第2スライダーとからなるフレーム保持手段と、測定子をレンズ枠溝に沿って移動させる測定子移動機構を持ち、測定子の移動を検知してレンズ枠の三次元形状を得る測定ユニットと、両眼トレース時に測定ユニットを左右方向に移動させる左右移動機構と、第1スライダー又は第2スライダーに形成され、両眼トレース時に測定ユニットが左右に移動される際に左右レンズ枠の枠外で測定子が通過する通路と、一方のレンズ枠の測定終了後に測定子移動機構及び左右移動機構を制御して測定子を通路に移動させ、他方のレンズ枠の測定開始位置に移動させる制御手段と、を備える。
(もっと読む)
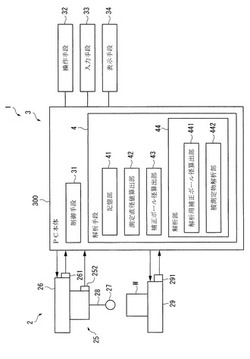
測定機
【課題】フィードバック制御部の安定性を損なうことなく、高速応答性を向上させることができ、測定精度を向上させることができる測定機の提供。
【解決手段】表面性状測定機1は、被測定物Wに当接する接触子41Aと、被測定物Wの表面に倣って接触子41Aを移動させるセンサ駆動機構43と、センサ駆動機構43を制御する制御装置3と、被測定物Wに当接することで接触子41Aにかかる測定力を検出する力センサ41とを備える。制御装置3は、測定力の目標値を出力する目標値出力部31と、目標値に対する測定力の偏差に基づいて、センサ駆動機構43をフィードバック制御するフィードバック制御部32と、フィードバック制御部32に設けられるフィードバック補償器322とを備える。フィードバック補償器322は、測定力に応じてフィードバック補償する。
(もっと読む)
カムプロファイル測定装置
【課題】安価で、しかも、複数種のカムのプロファイルを高精度に測定できるカムプロファイル測定装置を提供する。
【解決手段】カム1のプロファイルを測定するカムプロファイル測定装置。カム1を回転させる回転機構20と、カム1の回転角度を検出する回転角度検出手段30と、カム1のカムフォロア当接位置に当接され、カム1が回転することにより所定方向へ移動するプローブ40と、このプローブ40を所定方向に沿って案内する案内機構50と、プローブ40の移動位置を検出する位置検出手段60と、を備える。
(もっと読む)
玉型形状測定装置及び玉型形状測定方法
【課題】フィーラがレンズ枠の溝又は型板の周縁に当接する際、フィーラが停止してしまうのを防止しつつ、レンズ枠又は型板への衝撃を弱め、レンズ枠又は型板の破損を防止する玉型形状測定装置及び玉型形状測定方法を提供すること。
【解決手段】眼鏡枠(レンズ枠)LF(RF)の溝又は型板の周縁に向かって接触子(フィーラ)37の移動量を検出し、検出された移動量に応じた移動速度が緩慢になるように、接触子37の移動量を制御することで、眼鏡枠LF(RF)又は型板への衝撃を弱め、眼鏡枠LF(RF)又は型板の破損を防止することができる。
(もっと読む)
形状測定装置、形状測定方法及び形状測定プログラム
【課題】被測定物の高さ変位によってアームが回転した場合であっても、測定点を正確に算出可能な形状測定装置を提供する。
【解決手段】形状測定装置は、擬似測定点を取得した際におけるアームの基準位置からの回動角度に基づいて、接触子の表面形状を特定する接触子モデルの基準角度からの回転角度と、この回転角度における接触子モデルの形状を算出する接触子モデル形状算出部213を備える。測定点算出部216は、比較部215において接触子モデルの基準角度における形状と、接触子モデルの回転角度における形状との変位量がしきい値以下と判断された場合には、接触子モデルの基準角度における所定位置を測定点として算出し、比較部215において変位量がしきい値を超えると判断された場合には、接触子モデルの回転角度における所定位置を測定点として算出する。
(もっと読む)
形状測定用プローブ制御装置
【課題】形状測定装置において、低測定力を維持したまま高速にプローブを測定面に追従させることができ、高速で高精度な測定を実現できる形状測定用プローブ制御装置を提供する。
【解決手段】X制御モード切換スイッチ41とY制御モード切換スイッチ45とを備え、測定物の形状、または測定時のXプローブ傾斜角度θXとYプローブ傾斜角度θYとの関係により、一方の軸で位置制御を、他方の軸で傾き制御を行うようにした。
(もっと読む)
三次元測定機
【課題】測定値の誤差を適切に補正することができる三次元測定機の提供。
【解決手段】三次元測定機1は、測定子を有するプローブ21と、プローブ21を倣い移動させる移動機構22と、移動機構22を制御するホストコンピュータ5とを備える。ホストコンピュータ5は、移動機構22の移動量を取得する移動量取得部52と、測定値を算出する測定値算出部53とを備える。測定値算出部53は、測定子の位置の誤差を補正するための補正量を算出する補正量算出部と、移動機構22の移動量と、補正量とに基づいて測定子の位置の誤差を補正する補正部とを備える。補正量算出部は、プローブ21に設定された基準点におけるプローブ21の並進誤差を補正するための並進補正量と、基準点を回転中心とするプローブ21の回転角、及び基準点から測定子までのプローブ21の長さに基づくプローブ21の回転誤差を補正するための回転補正量とを算出する。
(もっと読む)
眼鏡枠測定装置
【課題】眼鏡枠測定装置において、接触子が受ける摺動抵抗の低減を図り、且つ、接触子の眼鏡枠に対する押圧力を安定させる。
【解決手段】接触子37の眼鏡枠の内周縁に当接する先端に回転可能な球状部材60が備えられ、この球状部材60が、眼鏡枠の形状測定時に内周縁に沿って回転することにより、接触子37と眼鏡枠との間の摺動抵抗を低減して、接触子37に生じる回転モーメントを軽減させるとともに、接触子37内部に備えられた圧力検出手段61が球状部材60にかかる圧力を検出し、この検出された圧力が一定圧力となるように、演算制御回路(52)(移動制御手段(64))が接触子37の移動を制御することにより、接触子37の眼鏡枠に対する接触子37の押圧力を安定させる。
(もっと読む)
眼鏡用の形状測定装置
【課題】収納時に測定部のスライド移動を防止した眼鏡用の形状測定装置を提供する。
【解決手段】レンズ枠の測定子37を上下に移動させる移動機構を有し且つ水平方向にスライド移動可能な測定部を備えた眼鏡用の形状測定装置であって、測定子37を下降させて収納した際に、測定部をロックしてスライド移動を防止する固定手段1000を設けた。
(もっと読む)
玉型形状測定装置
【課題】玉型ホルダに玉型を取り付ける際に、玉型の穴の位置を作業者が直視でき、穴位置を自動的に測定するための穴位置測定装置において穴位置検出を正確に行うことができる玉型形状測定装置を提供すること。
【解決手段】玉型ホルダ100に保持された玉型Tの周縁形状を測定子で測定して玉型形状データを求めるようになっている。しかも、玉型ホルダ100は、リムレスフレームの金具取付け用の穴のあいた玉型又はダミーレンズの穴のあいた玉型を保持する玉型保持具122と、下方に開放するホルダ本体101と、ホルダ本体101内に設けられ且つ玉型保持具122の取付軸部123を嵌合保持させる軸保持筒部115dと、軸保持筒部115dを玉型保持具122の取付軸部123に対して締め付け固定する締付部材118とを有する。また、締付部材118で軸保持筒部115dを玉型保持具122の取付軸部123に対して締め付け固定した際に、玉型Tの穴h1〜h3を直視させるための所定形状の確認穴112がホルダ本体101に設けられている。
(もっと読む)
眼鏡枠形状測定装置
【課題】実測値に基づいて測定ポイント毎に枠形状の変形判断を行うことになり、予測と異なる方向に枠形状が変化する場合を含め、精度良く眼鏡枠のレンズ枠形状の測定を行うことができる眼鏡枠形状測定装置を提供すること。
【解決手段】レンズ枠形状を測定する眼鏡枠形状測定装置において、レンズ枠用測定子37と、駆動モータ6と、レンズ枠形状の全周を複数の測定ポイントに分け、レンズ枠用測定子37をレンズ枠形状に沿って摺接移動させながら各測定ポイントにて測定した枠形状値(ρn,Zn)を枠形状情報(θn,ρn,Zn)として取得するレンズ枠形状測定演算制御手段(図11)と、を有する。このレンズ枠形状測定演算制御手段(図11)は、1つの測定ポイントでの枠形状値と測定済みの枠形状値を比較し、1つの測定ポイントで検出した枠形状変化量に応じた押圧値を決め、この押圧値が予め設定していた押圧値と異なる場合、押圧値を再設定し、既に測定した測定ポイントでの枠形状を再測定する。
(もっと読む)
玉型形状測定装置
【課題】フレーム枠の形状を簡単且つ正確に測定することのできる玉型形状測定装置を提供する。
【解決手段】眼鏡のフレーム枠を保持する保持部を有する保持手段と、フレーム枠のヤゲン溝に当接可能な測定子と、測定装置本体から離れた位置にある仮想軸を中心にして保持手段をスイングさせる保持手段スイング機構とを備え、測定子をヤゲン溝に当接させることによりフレーム枠の形状を測定する玉型形状測定装置であって、保持手段スイング機構によって保持手段をスイングさせたときの保持手段のスイング角度を記憶し、フレーム枠の一方の玉型形状を測定し、そのときのフレーム枠の反り量が一定値を超えた場合、保持手段スイング機構を制御して、保持手段を一方向にスイングさせて一方の玉型形状を再度測定するとともに、フレーム枠の他方の玉型形状を測定する場合に、逆の方向にスイングさせる制御手段を設けた。
(もっと読む)
形状測定装置
【課題】光学素子の基準面測定と光学面測定を1つのプローブで測定する。
【解決手段】プローブハウジング4とプローブシャフト2の間に、プローブシャフト2の相対変位を測定するX1変位計6a、X2変位計6b等を設け、プローブシャフト2の並進変位と回転変位を測定する。また、プローブシャフト2に対して並進力と回転力を発生させるために、ヨーク3a、3b、磁性体3c、3dを有するX力発生機構、Y力発生機構を設ける。被測定物Wの光学面Waの測定は、Z変位計7の出力を用いて行い、基準面Wbの測定は、X1変位計6a、X2変位計6b等の出力を用いる。
(もっと読む)
ロープ溝形状測定装置およびロープ溝形状測定方法
【課題】ロープ溝の摩耗量の測定では、ロープ溝の全周に渡る測定を実施せず、ロープ溝のある部分の代表値の測定のみであり、ロープ溝に偏摩耗などがある場合は正確に検出できない。
【解決手段】ロープ溝21の特定部位の位置を測定する位置センサ4と、この位置センサを溝車2の中心軸方向に沿って移動する軸方向移動手段6と、溝車の回転角度を検出する回転角検出手段9と、位置センサの検出値(位置データ)と軸方向移動手段の駆動量(駆動データ)と回転角検出手段の検出値(回転角度データ)とからロープ溝の断面形状を算出する溝形状演算手段10とを備え、溝車のロープ溝の全周に渡る摩耗状態を測定できるようにした。
(もっと読む)
21 - 40 / 75
[ Back to top ]