
Fターム[2F062HH29]の内容
機械的手段の使用による測定装置 (14,257) | プローブ、測定子 (1,750) | フィーラ接触角度の検出 (9)
Fターム[2F062HH29]に分類される特許
1 - 9 / 9
表面性状測定機
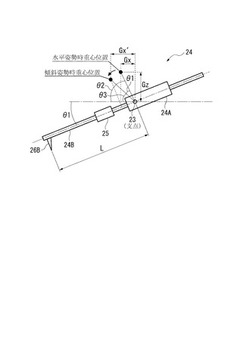
【課題】傾き角度を任意の角度に変更した場合でも正確な測定ができ、メモリ容量も少なく、新たなスタイラスの使用でもユーザに対する作業負担を軽減できる表面性状測定機。
【解決手段】質量の異なる第2測定アーム24Bが取り付けられた測定アーム24の種類毎に、測定アーム全体の質量M、支点(回転軸23)からスタイラス26Bまでのアーム長L、測定アームが水平姿勢時において測定アームの水平方向重心位置Gxおよび上下方向重心位置Gzを記憶した測定アームテーブルと、測定アーム指定手段と、検出手段の傾斜角度θ1を検出する傾斜角度検出器と、指定された測定アームのM、L、GxおよびGzを測定アームテーブルから読み出し、これらと傾斜角度検出器で検出された傾斜角度θ1とから、測定アームの水平姿勢時の測定力と測定アームの傾斜姿勢時の測定力との差を演算し、この差を補正値として測定力を調整する制御装置とを備える。
(もっと読む)
計測装置、計測方法、プログラム、および、記録媒体

【課題】被計測物の周囲の形状を手軽に計測する。
【解決手段】バンドは、互いに平行な連結軸であるジョイントを介して複数のパネルが連結され、ジョイントを軸にして隣接するパネル間の角度であるパネル間角度を調節可能である。各ジョイントには、パネル間角度を検出する角度センサが設けられている。そして、検出された各パネル間角度に基づいて、バンドが装着された被計測物の周囲の少なくとも一部の形状である周囲形状が計測される。本技術は、例えば、腹囲計測装置に適用できる。
(もっと読む)
形状測定装置及び形状測定方法
【課題】 接触式プローブによって、垂直に近いような急傾斜面であっても、安定して接触力を制御し、高精度な形状計測を行う。
【解決手段】 接触式プローブを被測定物の表面に沿って移動させることで、被測定物の表面形状を測定する形状測定方法において、プローブに加わる接触力の分力の大きさにより、被測定面の傾斜を推定し、垂直に近い状態であると判断するとプローブ支持手段の移動方向に交差する方向にプローブ支持手段を移動させる。
(もっと読む)
形状測定装置
【課題】プローブの撓みの影響を受けずに高精度の形状測定を行う。
【解決手段】プローブ先端部3に一体に平面ダイクロイックミラー10及び球面ミラー16を設ける。オートコリメータ光学系5により平面ダイクロイックミラー10の傾斜量を測定し、並進移動量測定光学系12により球面ミラー16のX,Y軸方向のずれ量を測定する。ずれ量算出部42bは、測定した平面ダイクロイックミラー10の傾斜量及び球面ミラー16のずれ量に基づいて、プローブ先端部3において被測定物4の表面に接触する接触点となる球19の基準位置に対するX,Y軸方向のずれ量を算出する。推定部42cは、ずれ量算出部42bにより算出されたずれ量から、プローブ先端部3の球19のX,Y軸方向の位置を推定する。
(もっと読む)
プローブヘッド
【課題】ロータリーカップリングによって下ハウジングを上ハウジングに対して連続的に回転させることを可能とするプローブヘッドを提供する。
【解決手段】測定プローブ2を支持する連結手首を有し、プローブを2つの回転軸A、Bのまわりに回転させるプローブヘッド6であり、ヘッドは装置と接続するための上ハウジング10と回転可能に接続し、第1モータMBによって上ハウジングに関して第1軸Bまわりに連続的に回転することができる、下ハウジング12と測定プローブに回転可能に接続し、第2モータMAによって下ハウジングに関して前記第1軸を横切る第2軸Aまわりに回転することができるキャリジ14と、第1軸まわりの連続的な回転を可能として少なくとも第2モータのための電力経路aを提供するロータリーカップリング90と、を具えた。
(もっと読む)
測定システム
【課題】高速、かつ少ない振動およびエラーで部品表面の多数の座標ポイント取得できるようにする。
【解決手段】基準表面に対して可動サポートを位置決めするための1つ以上のアクチュエータとを含む測定システムであって、前記可動サポートが、サポートコネクタと、前記可動サポートと取り外し可能に接続された、前記基準表面に位置決めされたワークピースの表面の走査経路にある複数のポイントを測定するための走査プローブと、前記サポートコネクタと相互作用するように配置された、モジュラ回転取り付け具を前記可動サポートに接続させるための第1のコネクタ90、およびプローブコネクタと相互作用するように配置された、前記走査プローブを前記モジュラ回転取り付け具に接続させるための第2のコネクタ40を備えるモジュラ回転取り付け具と、前記第2のコネクタを前記第1のコネクタに対して回転させるためのアクチュエータ58とを有す。
(もっと読む)
走査ヘッドの較正装置および方法
電動の関節式走査ヘッド(16)における角度測定スケールを、基準加工品(40;60;80)を用いて較正する方法が記載される。この方法は、走査ヘッド(16)に取り付けられた走査プローブ(28)などの表面検出デバイスを走査ヘッド(16)の少なくとも1軸(A1,A2)のまわりに回転させ、基準加工品(40;60;80)に対し異なる複数の角度方向に表面検出デバイスを移動させる工程を含む。次に、その異なる角度方向のそれぞれで、表面検出デバイスにより、基準加工品(40;60;80)の少なくとも1つの特性を測定する工程が実行される。そして、測定された基準加工品(40;60;80)の特性を用い、また付加的に既知または較正済みの基準加工品(40;60;80)の特性を用いて、走査ヘッドの少なくとも1つの測定スケールに対する誤差マップまたは関数を生成する。この方法は、走査ヘッド(16)を移動させるために、座標測定機械(14)などの座標位置決め機械の使用を含むことができる。基準加工品(40;60;80)は、単一の特徴部または配列された複数の特徴部(46;66)を含むことができる。 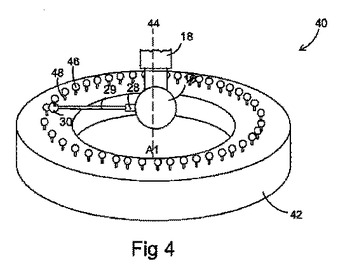 (もっと読む)
(もっと読む)
触針式形状測定装置
【課題】触針式形状測定装置において、触針と被測定面の接触位置を算出することによって被測定面の形状を高精度に測定する。
【解決手段】最初にクランプ13で触針14をアーム15に固定した状態で被測定面を走査し、走査によって変位検出機構16で得られたZ方向の変位データを測定する。次に、触針14がアーム15に対してクランプ13による接続部分を中心にXY平面に可動となるようにクランプ13を切り替え、触針14が走査した線上において、先端球10を被測定面に接触させ、その位置からZ方向に微小な変位を加えた場合のX、Y及びZ方向の変位を測定し、先端球10と被測定面との接触位置を測定する。これらZ方向の変位データ及び先端球10と被測定面との接触位置データに基づいて走査線上における被測定面の形状を計算する。
(もっと読む)
表面性状測定装置
【課題】傾斜を有する被測定物表面を高精度に倣い測定する表面性状測定装置を提供する。
【解決手段】 測定部210により被測定物表面を倣い走査する。測定部210は、接触部212を先端に有するスタイラス211と、接触部212が被測定物表面に当接した際のスタイラス軸方向の測定力を検出する測定力検出手段を有する。移動機構は、測定力を一定にしながら測定部210を被測定物表面に対して相対移動させる。
移動機構は、接触部210を回転中心として測定部210を回転させてスタイラス211を被測定物表面に垂直にする回転機構400を備える。
(もっと読む)
1 - 9 / 9
[ Back to top ]